基于扩展卡尔曼滤波法的船舶永磁同步电机无传感器控制
2020-12-24 08:01王婷马继先瞿云飞刘英杰
软件 2020年7期
王婷 马继先 瞿云飞 刘英杰


摘 要: 综合考虑潜艇侧推系统使用的电机模型与运行环境,针对无位置传感器永磁同步电动机控制技术进行研究,旨在最大化改进潜艇侧推电机的运行性能并提高电机工作的可靠性。如今永磁同步电机无位置传感器控制的各种算法中,EKF算法在高性能伺服系统中应用最广泛,能在宽速度范围内高效工作,甚至在较低的速度下同样能精确完成转速估计。文章先对永磁同步电机(permanent magnet synchronous motor,PMSM)进行数学建模分析,再以表贴式三相PMSM在静止坐标系下的数学模型为基础,进行基于扩展卡尔曼滤波法(Extended Kalman filter,EKF)的电机位置信息的估算。最后搭建仿真模型,通过仿真分析,验证基于EKF算法能有效的提高电机控制系统的可靠性与稳定性。
关键词: 永磁同步电机;潜艇侧推;无传感器控制;扩展卡尔曼滤波
中图分类号: TP273+.3 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.07.053
本文著录格式:王婷,马继先,瞿云飞,等. 基于扩展卡尔曼滤波法的船舶永磁同步电机无传感器控制[J]. 软件,2020,41(07):255-259
Sensorless Control of Marine PMSM Based on EKF
WANG Ting1, MA Ji-xian1, QU Yun-fei1, LIU ying-jie2
(1. School of Electronic Information, Jiangsu University of Science and Technology, Zhenjiang 212000, Jiangsu, China;2. Technology Center of CSSC Power Co., LTD., Zhenjiang 212000, Jiangsu, China)
【Abstract】: Considering the motor model and operating environment used in the submarine side thrust system, the research is based on the position sensorless permanent magnet synchronous motor control technology. The aim is to maximize the improvement of the submarine side thrust motor's operating performance and the reliability of the motor work. Among various algorithms for positionless sensor control of permanent magnet synchronous motors, the EKF algorithm is the most widely used in high-performance servo systems. It can work efficiently in a wide range of speeds, and can accurately complete the speed estimation even at lower speeds. This paper first performs mathematical modeling and analysis on PMSM, and then uses the mathematical model of surface-mounted three-phase PMSM in the stationary coordinate system as the basis to estimate the motor position information based on EKF. Finally, a simulation model is built, and through simulation analysis, it is verified that the reliability and stability of the motor control system can be effectively improved based on the EKF algorithm.
【Key words】: Permanent magnet synchronous motor; Side pushing of submarine; Sensorless control; Extended Kalman filter
0 引言
永磁同步電机(permanent magnet synchronous motor,PMSM)凭借着功率密度高、转矩惯量比大、动态响应速度快的优势,在航天航海以及军事领域得到了广泛应用逐步体现了巨大的发展潜力。潜艇侧推系统由于位置传感器的存在,可靠性降低,密封难度加大,海水工作环境对于传感器的要求也比较苛刻,而永磁同步电机无速度传感器控制不仅省略了机械的位置传感器,提高系统可靠性,同时降低了对运行环境的要求,简化了连接线路,有效的避免了这一系列问题[1]。
目前,无传感器控制技术大体可分为以下两类:一种是估算精度较高的,利用电机凸极特性来估算转子位置信息与速度的方法。另一种是利用反电动势或者定子磁链信息估算转子位置信息与转速,它的优势主要体现在中高速段,在零低速段将会检测失效。文献[2]采用卡尔曼滤波算法,等效模型的准确性以及抗干扰性带来了相对小的系统误差和测量噪音,系统稳定性显著提升。文献[3]采用滑模变结构控制,电机参数的改变对这个非线性控制策略而言影响甚微,因此系统鲁棒性很好。文献[4]采用模型参考自适应控制(Model reference adaptive con?trol,MRAS),该控制策略主要由三部分组成,分别是可调模型、参考模型和自适应律。MRAS的主旨是用已知参数的表达式作为参考模型,可调模型用含有未知参数的表达式来表示,保证这两个模型的输出量的物理意义完全相同,这两个模型的参数可以通过自适应律进行调节。
实时性是扩展卡尔曼滤波器的一种特征,所以它可实时跟踪系统的状态并进行有效的输出,同时,它可以减少干扰、抑制噪声,其效果显著,即使当噪声估算不准确时,其依旧能够让观测器收敛。综合分析上述研究成果,本文以扩展卡尔曼滤波算法为基础,建立基于EKF算法的估算转子位置和转速的模型,通过详细地分析仿真内容,得出该方法能够满足控制的要求,系统的鲁棒性较好。
1 PMSM数学模型
2 扩展卡尔曼滤波器设计
2.1 扩展卡尔曼滤波器的状态估计
EKF的状态估计大致分为预测阶段和校正阶段两个阶段,详细步骤如下[5]:
2.2 无位置传感器系统EKF仿真模型建立
依照上一节的分析,基于EKF的PMSM系统结构框图如图1所示。
由图2可看出,SVPWM计算模块和EKF估算模块构成了基于EKF的无位置传感器系统仿真模型。通过MATLAB软件中s函数构建出基于EKF的估算模块,输入设置为PMSM的参考电压和实际电流值,输出设置为估算的转子位置信息和转速信息[7]。仿真中的电机参数具体数据如表1所示。
仿真中的协方差矩阵及初值选择如下:
系统的随机干扰与测量噪声的统计特性往往不得而知,这就导致协方差矩阵的选择变得尤其的重要,合适的数值才能使算法有效收敛且保证一定的精确度。而这个数值通常依据经验或者仿真调试来设置。
3 仿真分析
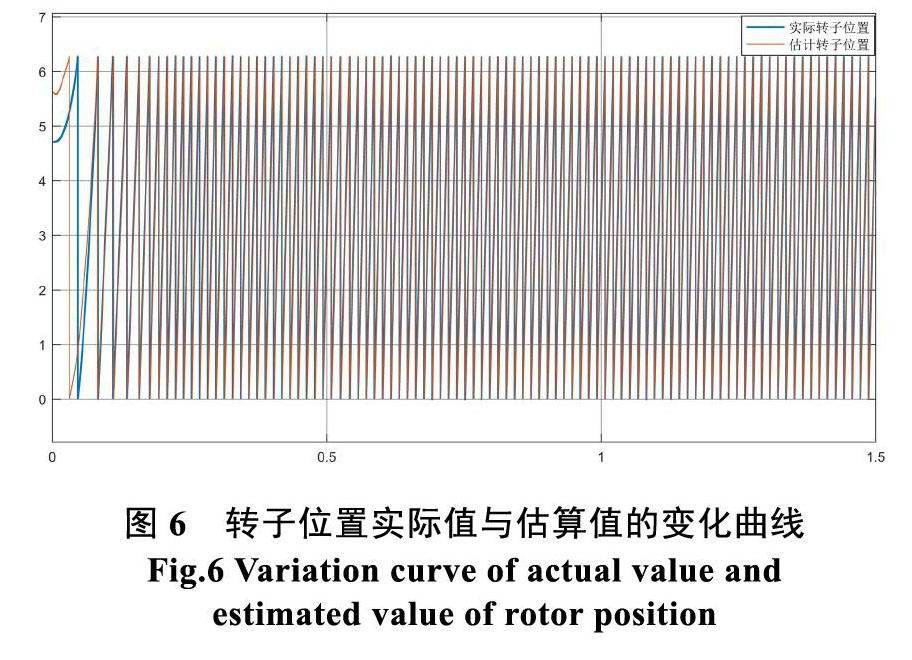
图3是电机的定子三相电流、实际转速、转矩变化曲线。图4是电机转速的估算值与实际值的变化曲线。从图中可以看出,估算曲线与实际曲线偏差较小,且最终保持在一个稳定的数值,由此可得EKF控制算法能够将误差范围控制的很小。波动调节速度较快,超调小,系统稳定性高。;图5为 转速估算误差变化曲线,估计误差在0值附近达到稳定,除电机启动瞬间存在波动外,波动极小;图6为转子位置实际值与估算值的变化曲线,估算曲線与实际曲线偏差较小,拟合情况良好,波形往返有规律性;图7是转子位置估算误差变化曲线,估计误差在0值附近达到稳定,除电机启动瞬间存在波动外,波动较小,满足系统的稳定性要求。
4 结论
本文首先对扩展卡尔曼滤波的原理进行简单介
绍,并进行相应的数学公式推导,再简述EKF控制算法,同时将其应用到船舶永磁同步电机控制中,用于改进潜艇的侧推系统,结合实验仿真结果分析得出以下结论:
(1)采用扩展卡尔曼滤波器法,可以实现在电机中高速运行时对转子的位置及转速准确跟踪。
(2)基于扩展卡尔曼滤波的转子位置状态估计能使转子位置估计值很好地收敛到实际值。
本文在一定程度上仍然存在不足之处,针对稳态系统和动态系统,EKF的估计效果并不相同,本文分析稍显片面,仍需改进。
参考文献
-
刘计龙, 肖飞, 沈洋, 麦志勤, 李超然. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16): 76-88.
-
周杰, 鞠涛, 顾加鹏, 等. 永磁同步电机速度内模控制的研究[J]. 机电产品开发与创新, 2017, 30(1): 87-89.
-
Xiao Y, Gang L, Song X, et al. Sensorless I/F startup based on modified sliding mode observer for PMSM[J], Electric Power Automation Equipment, 2015.
-
徐向前, 徐文静, 杨士慧. 基于预测模型的永磁同步电机直接转矩控制[J]. 电机与控制应用, 2017, 44(1): 29-33.
-
王盛德, 王士伟, 吴雨晨, 王侃. 基于EKF的PMSM无电流传感器矢量控制[J]. 南京工程学院学报(自然科学版), 2019, 17(03):33-37.
-
李长明. 新能源汽车永磁电机位置传感器故障分析及处理的研究[D]. 安徽工程大学, 2019.
-
李波, 胡建军, 谢海峰. 基于EKF的无位置传感器永磁同步电动机控制系统[J]. 伺服控制, 2009(02): 38-40+49.
-
Shi T, Wang Z, Xia C. Speed measurement error suppression for PMSM control system using self-adaption Kalman observer[J], IEEE Transactions on Industrial Electronics, 2015, 2(5): 2753 –2763.
-
孟祥宾, 朱军, 李紫豪, 等. 多重自适应卡尔曼滤波 PMLSM 无传感控制[J]. 软件, 2018, 39(8): 18-23.
-
周婉, 王移芝. 基于卡尔曼预测器的云计算资源调度研究[J]. 软件, 2015, 36(9): 12-15.
-
Bolognani S, Zordan M, Zigliotto M, Experimental fault tolerant control of a PMSM drive [J]. IEEE Transactions on Industrial Electronics, 2000, 47(5): 1134-1141.
-
Liu X, Chen H, Zhao J, et al. Research on the performances and parameters of interior PMSM used for electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3533-3545.
-
陈政, 刘康. 闪烁噪声下的自适应无迹卡尔曼算法[J]. 软件, 2018, 39(01): 70-74.
-
李拓, 杜庆楠. 基于 TMS320F28335 的三相感应电机矢量控制系统的研究[J]. 软件, 2018, 39(3): 130-135.
-
张锐, 王剑平, 杨晓洪. 基于改进SRUKF的感应电机直接转矩控制[J]. 软件, 2018, 39(4): 56-62.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
电子设计工程(2014年6期)2014-02-27