
奇异值分解法和模糊C均值法在探地雷达图像处理中的应用研究
2020-12-25 03:16闻铖严玲玲牟京亚屈乾达熊宇陈秋航
微型电脑应用 2020年12期
闻铖, 严玲玲, 牟京亚, 屈乾达, 熊宇, 陈秋航
(1.国网湖北省电力有限公司检修公司, 湖北 武汉 430050;2.三峡大学 电气与新能源学院, 湖北 宜昌 443000)
0 引言
探地雷达(Ground Penetrating Radar,GPR)作为一种无损的探测设备,目前在高速公路、铁路路基检测,考古发掘探测及隧道内部探伤等各项工程探测都使用其作为主要探测手段[1]。探地雷达技术可以用来埋藏在地下的金属和非金属物体,并能够进行二维或三维模式下的定位。探地雷达与其他常规的地下探测方法相比,具有探测速度快、探测过程连续、分辨率高、操作方便灵活探测费用低等优点,故其在工程勘察领域的应用日益广泛[1]。
由于浅部地下介质复杂多变,且大都具有频散特性,电磁波在其中传播衰减速度快,散射非常强烈,加之各种人为设施的杂乱回波、天线的耦合等原因,天然干扰很难与目标体的反射波分离,使得在进行实际探测中,得到的数据不可避免地包含了杂波和噪声[2-3]。所以探地雷达接收到的数据包括目标信号、杂波以及噪声。在探地雷达的应用过程中,经典的杂波抑制方法是通过在频域和时域中进行数据滤波来实现的。但当被探测物体接近于地表,或与地表具有相同的时间响应的情况下,这种杂波抑制方法便无法奏效。文献[4]提出了一种基于频率域-多普勒域宽带雷达杂波抑制方法,虽然该方法能够有效减小滤除杂波过程中的能量损失问题,但在探测目标和杂波有较多重叠的区域时,该方法便无法保障目标的探测精度。其他一些杂波抑制方法包括卡尔曼滤波法[5]和基于神经网络的杂波抑制方案[6]也用于减少探地雷达成像中杂波的减少。这些方案均是基于目标的双曲线特征,如果目标被埋在地面附近,目标的双曲线特征将因为地面反射而重叠,影响对探测目标的识别。
近年来,相关学者对基于奇异点分析、主成分分析、独立成分分析的统计分析方法在杂波抑制领域的应用有了广泛的研究。这些方法将接收的数据分解成以下成分:目标、杂波和噪声。剔除杂波和噪声后得到的成分即为包含目标特征的成分。文献[7]提出了一种基于主元分析主分量估计的方法,确定了目标特征成分选取的限制条件。
针对上述问题,本文提出了一种基于奇异值分解法(Singular Value Decomposition,SVD)和模糊C均值法(Fuzzy C-Means,FCM)的GPR图像处理方法。使用改进的SVD将接收的数据辨别成探测目标、杂波和噪声的子空间。针对探测目标、杂波和噪声信号存在重叠区域的情况时,使用FCM聚类算法对其进行分离,最后通过不同光谱成分的加权得到所需的目标图像。
1 基于奇异值分解和模糊C均值法的图像处理方法
1.1 探地雷达探测信号的组成
探地雷达探测信号一般由杂波、探测目标和噪声信号组成,运用探地雷达进行地下物质探测。其探测示意图,如图1所示。
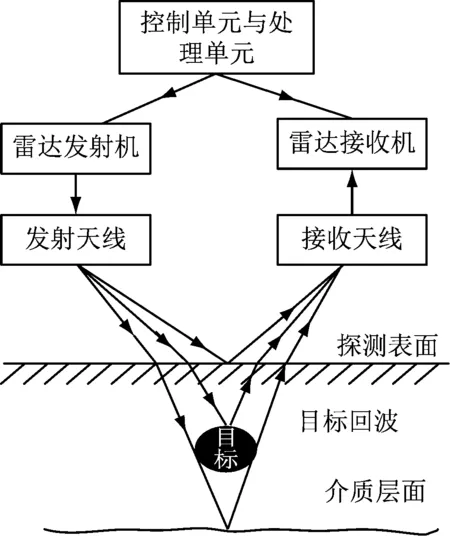
图1 探地雷达探测示意图
由此可见在使用探地雷达进行地下物质探测时,接收的探测信号中,地层反射波(杂波)信号和噪声信号是不可避免的。
1.2 奇异值分解(SVD)定义
矩阵的奇异值分解的主要理论定义如下。


1.3 模糊C均值法(FCM)定义
FCM算法是一种基于目标函数的聚类算法,通过目标函数的最小化实现聚类。一般使用X={x1(i,j),x2(i,j),…,xn(i,j)}来描述图像,其中n为像素点总数,x(i,j)为第k个像素点的特征向量(i≤k≤j)利用聚类方式进行图像分割的实质是将像素点集合分为C类的问题,每个类属中均含有唯一的聚类中心,在不断的迭代中实现聚类中心的更新,通过目标函数的最小化实现聚类结果的优化,使用隶属度矩阵来描述各个像素点的类属性质,通过单个像素点与聚类中心的相似程度来判断其在不同类别中的隶属程度[8]。
1.4 基于SVD和FCM的图像优化方法
在GPR图像增强算法中,对于扫描得到的图像X(X为N行M列的数据矩阵,M代表采样道数,N代表每道数据的样点数),对其用SVD法将其分解成不同的光谱分量,如式(1)。
X=USVH
(1)
式中,U和V分别为有N行N列、M行M列的酉矩阵。S=diag(s1,s2…,sM),且s1≥s2≥…≥sM>0,其均为X的奇异值。杂波图像记为Xc,目标图像记为Xt,噪声图像记为Xn。探测图像X的分解,如式(2)。
(2)
式中,k1为杂波的奇异值,k2-k1为探测目标以及其他噪声的奇异值。
文献[3]提出了两种提取目标光谱图像的方法,方法一提出,第一类光谱分量包含了地层杂波,如式(3)。
(3)
而其他的光谱分量则包含了探测目标和噪声等,如式(4)。
(4)
方法一的局限性在于,只过滤掉了由于地表反射等产生的杂波,然而噪声成分却没有分离,即方法一得到的图像是包含噪声的。
基于此,文献[3]提出了方法二。在方法二中,第一类光谱分量包含了杂波,第二类光谱分量则包含了目标图像,噪声则包含在其余的光谱分量中,如式(5)。
(5)
然而这种方法却无法对多个目标进行识别。事实上,在探地雷达进行探测的过程中,即使探测场景仅有一个探测目标,该目标子空间的维度也可以超过一维,基于此,本文提出一种改进的SVD图像分解方法,如式(6)。
(6)
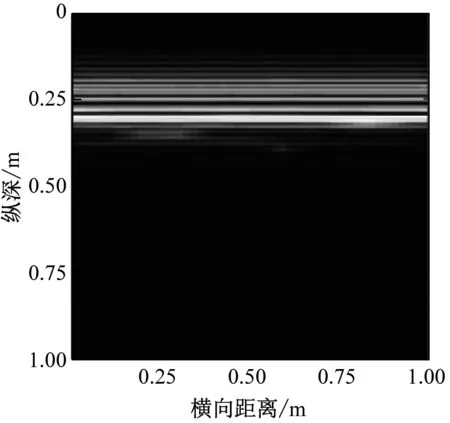
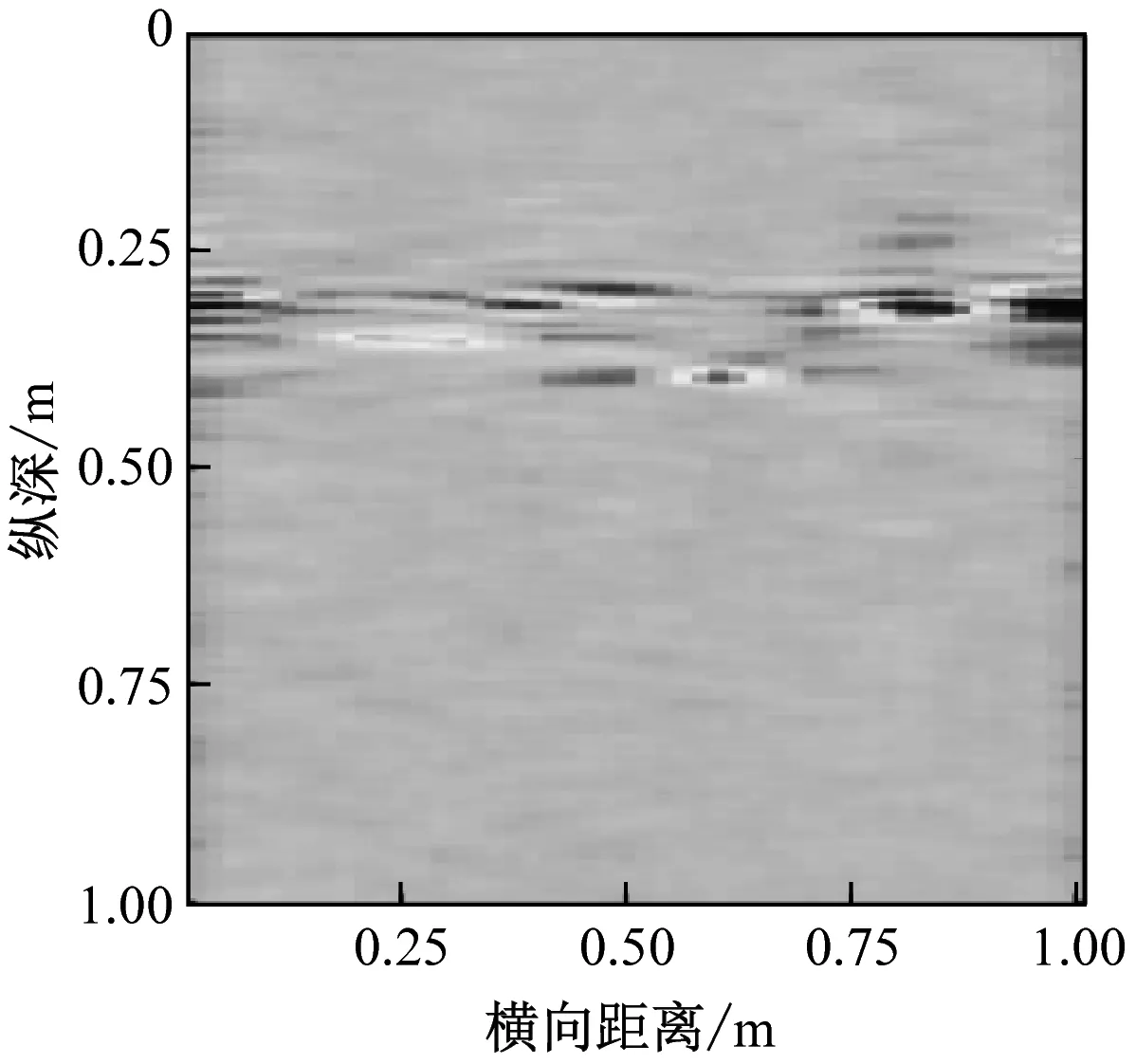
式中,X0杂波剔除后的图像,Y是目标图像,Z则是杂波图像。矩阵Y的秩RY=k2 (7) (8) 原始图像X基于探测目标、噪声、杂波的子空间,如式(9)。 (9) k2的值需要通过计算来确定。此时根据文献[9]提出的模糊C均值法来计算k2准确的的值。应用模糊C均值法的损失函数Jc最小求解表达式,如式(10)。 (10) (11) 式中,C1、C2分别是目标和噪声类别的聚类中心。聚类中心Cl的计算方式,如式(12)。 (12) 最后目标图像Xt3由不同光谱成分的加权,如式(13)。 (13) 本文采用WGPR200探地雷达系统进行现场实验。选用900 MHz天线,512个采样点,步长为0.015 m。实验过程中的计算参数的选取参照文献[10],其设定值为:干砂介电常数为3,空气介电常数为1,电导率为1. 0×10-10S/m。探测区域选定为一个2 m×4 m×1 m的布满干沙的沙坑。将3个盛满空气,其大小分别为0.25 m×0.05 m×2 mm、0.20 m×0.05 m×2 mm、0.15 m×0.05 m×2 mm的小型塑料箱埋藏在沙坑中。 根据文献[9]中提出的FCM聚类算法,可得奇异值sm的幅值图和基于FCM聚类算法的目标和噪声的隶属度图像,如图2(a)、(b)所示。 探测所得原始图像转换成灰度图的结果,如图3所示。 采用文献[3]中的方法二和本文方法进行了对比,对比实验结果,如图4、图5所示。 通过图像对比可以看出,相较于文献[3]的处理结果,本文所提出的算法能够有效地区分探测目标、杂波以及噪声的重叠边界,获取更清晰准确的目标图像。 通过计算峰值信噪比(Peak Signal to Noise Ratio,PSNR)和均方误差(Mean Square Error)来评判经过算法处理后的图像处理效果,PSNR是一种评价图像的客观标准,为了衡量经过处理后的影像品质,我们通常会参考PSNR值来衡量图像处理方法能否令人满意。MSR表示原图像和处理图像之间的均方误差。PSNR值越高,MSR值越小,则说明处理后的图像和原图越接近。本文通过Matlab2016a计算出文献[3]中的方法二与本文所提出算法的PSNR值和MSR值,如表2所示。 图2(a) 奇异值sm幅值图 图2(b) 目标和噪声的隶属度函数 图3 原始探测图像灰度图 图4 文献[3]中方法二处理结果 图5 本文方法处理结果 表2 PSNR值与MSR值对比 通过以上结果,证明本文所提出的方法MSR值更低,PSNR值更高,较于文献[3]中的方法,对图像的处理效果更好。 本文提出了一种基于奇异值分解法和模糊C均值法的探地雷达图像处理方法,尤其对于探测目标、杂波以及噪声信号存在重叠区域的情况,本文能够有效地对杂波和噪声信号进行分离,并能通过不同光谱成分的加权得到所需的目标图像。实验结果很好地证明了该方法的有效性。



2 实验验证
2.1 实验结果对比
2.2 性能参数对比




3 总结
猜你喜欢
房地产导刊(2022年10期)2022-10-18
北京航空航天大学学报(2022年8期)2022-08-31
黑龙江大学自然科学学报(2022年1期)2022-03-29
科学与信息化(2021年30期)2021-12-24
科技研究·理论版(2021年20期)2021-04-20
雷达学报(2021年1期)2021-03-04
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
电子技术与软件工程(2020年4期)2020-06-10
雷达与对抗(2020年1期)2020-06-05
