
移动机器人轨迹跟踪控制的研究
2020-12-28 11:53周加全谭丽娟李志明程茂华
电脑知识与技术 2020年31期
周加全 谭丽娟 李志明 程茂华
摘要:移动机器人在运动的过程中,存在干扰和外界因素的影响,使得移动机器人的效果并不是很理想,为了解决这个问题并根据移动机器人的动力学模型,加入了自适应模糊滑模控制算法,即通过自适应模糊控制来实时调整相应的参数,使移动机器人的运动轨迹的误差趋于零;最后通过仿真结果分析,该算法能够对移动机器人的运动轨迹实现较为精确的跟踪,而且该算法具有较好的鲁棒性,能够消除一定的干扰和外界因素影响,从而验证了该算法的有效性和优越性。
关键词:移动机器人;自适应模糊;滑模控制;鲁棒性
中图分类号: TP242 文献标识码:A
文章编号:1009-3044(2020)31-0219-03
Abstract:During the movement of the mobile robot, there are interference and external factors, which make the effect of the mobile robot not very ideal. In order to solve this problem and according to the dynamic model of the mobile robot, an adaptive fuzzy sliding mode control algorithm is added, namely Adjust the corresponding parameters in real time through adaptive fuzzy control, so that the error of the mobile robot's trajectory tends to zero; finally, through the analysis of the simulation results, the algorithm can achieve more accurate tracking of the mobile robot's trajectory, and the algorithm has more Good robustness can eliminate certain interference and external factors, thus verifying the effectiveness and superiority of the algorithm.
Key words: mobile robot; adaptive fuzzy; sliding mode control; robustness
隨着现代技术的发展,移动机器人已经是现代生活中不可缺少的一部分,也是机器人研究的最重要的一方面[1]。移动机器人不仅是需要在运动的过程中寻找最优路径而且能够按照这条路径移动,这体现了现代机器人的智能化[2],其主要是通过轨迹跟踪问题来实现的,可见轨迹跟踪问题是机器人研究的核心内容[3]。轨迹跟踪还可以有效改善移动机器人的轨迹的精确度,提高其运动性能,从而可以服务于人类,具有重要的研究价值[4]。
目前有关移动机器的轨迹研究方法相对较少,主要集中在反演法和神经网络控制等相关的智能控制方法[5],这些方法在研究的过程中不会涉及机器人的运动模型,相对来说,对机器人的实际应用不是很大[6]。还有一些智能算法比如:遗传算法虽然优化了PID控制参数,改善了其相关的性能,但它容易陷入局部最优,严重影响参数的优化效果[7]。为了改善机器人运动过程中出现的参数不稳定或未知情况的发生,并通过分析移动机器人的动力学模型,采用了一种新的方法自适应模糊滑模控制方法,这种方法进一步提高了移动机器人的运动轨迹的精度,而且具有较好的鲁棒性,能够有效地提高移动机器人的运动性能[8]。通过实验结果分析,该算法对移动机器人的运动轨迹实现了较为精确的跟踪,验证了该算法的有效性和优越性。
1移动机器人运动模型
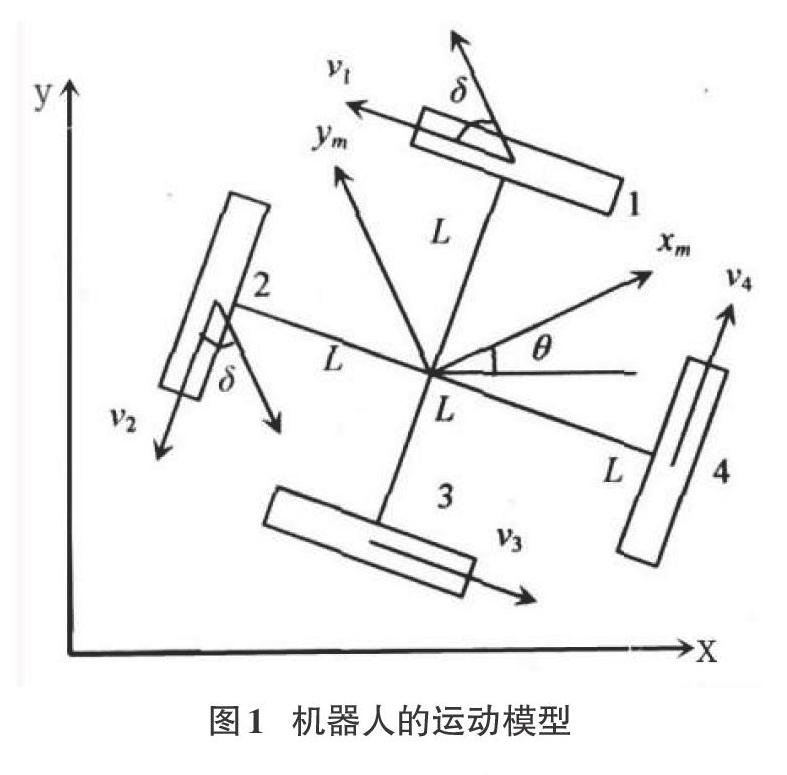
机器人的运动模型如图1所示,移动机器人在坐标系中可由轴的中心点的位置及运动过程中变化的角度进行表示,令[p=(x,y,θ)T],[q=(v,w)T],其中(x,y)表示移动机器人的位置,[θ]表示机器人的运动方向与横坐标轴之间的夹角,机器人的角速度为v,线速度为w。
轨迹跟踪控制控制问题的实质就是机器人在任意初始位姿误差下,使得机器人在移动的过程中跟踪上期望的轨迹,确定机器人的速度[12],且保证:[limt→∞(xryrθr)T=0]。
2 控制系统的设计
在表达式(6)中,可以得到yr为间接控制量,当[limt→∞xr=0,limt→∞θr=0]时,yr=0,表明yr为不可控量。根据该表达式,当xr=0时,定义了一个部分Lyapunov函数[vy=12y2r],根据文献[θr=-arctan(veyr)]可以使yr收敛[13]。为了保证能够xr,yr,[θr]都能够收敛,必须使yr先于xr,[θr]收敛。
由此可知,只要设计出合适的控制输入v和w,系统都是收敛的。根据Lyapunov函数得到了系统的一个速度向量u的一个控制律[14]。
在此基础上加入自适应模糊控制,对相应的参数进行实时调整,如果是以较大的速度运行时,使其系统位于滑模较远的位置,表达式(9)第一项起主要作用,保证系统能够快速的运动到滑模面;如果是以较小的速度运行时,使其位于滑模面,表达式(9)第二项起主要作用,保证系统系统的平稳运行。两者相互配合,可以有效改善系统的运动品质。选取xr和k分别为模糊变量的输入和输出,根据专家意见及控制规律,设计了上述的模糊控制器的规则。
3 仿真实验与分析
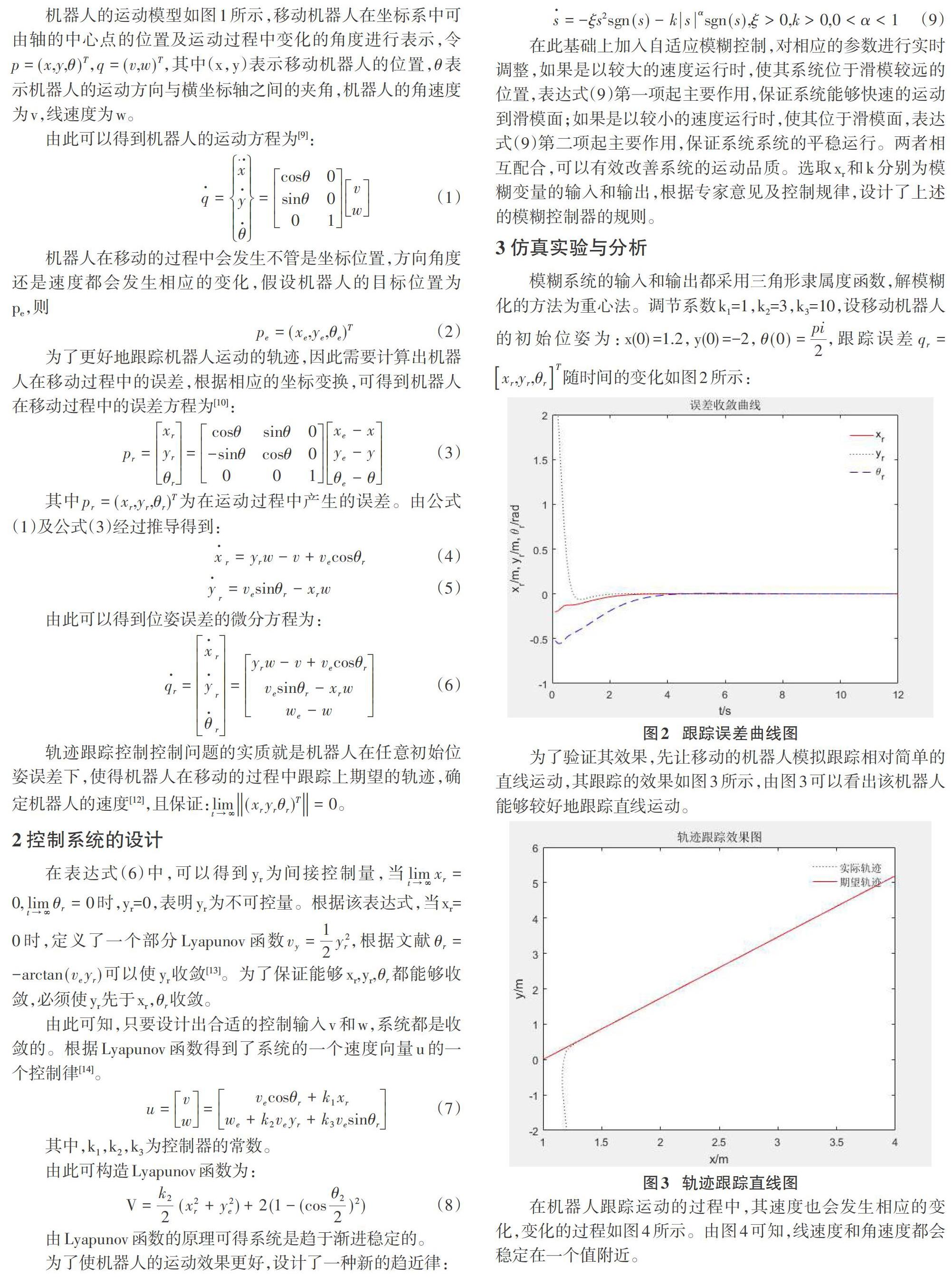
模糊系统的输入和输出都采用三角形隶属度函数,解模糊化的方法为重心法。调节系数k1=1,k2=3,k3=10,设移动机器人的初始位姿为:x(0)=1.2,y(0)=-2,[θ(0)=pi2],跟踪误差[qr=xr,yr,θrT]随时间的变化如图2所示:
为了验证其效果,先让移动的机器人模拟跟踪相对简单的直线运动,其跟踪的效果如图3所示,由图3可以看出该机器人能够较好地跟踪直线运动。
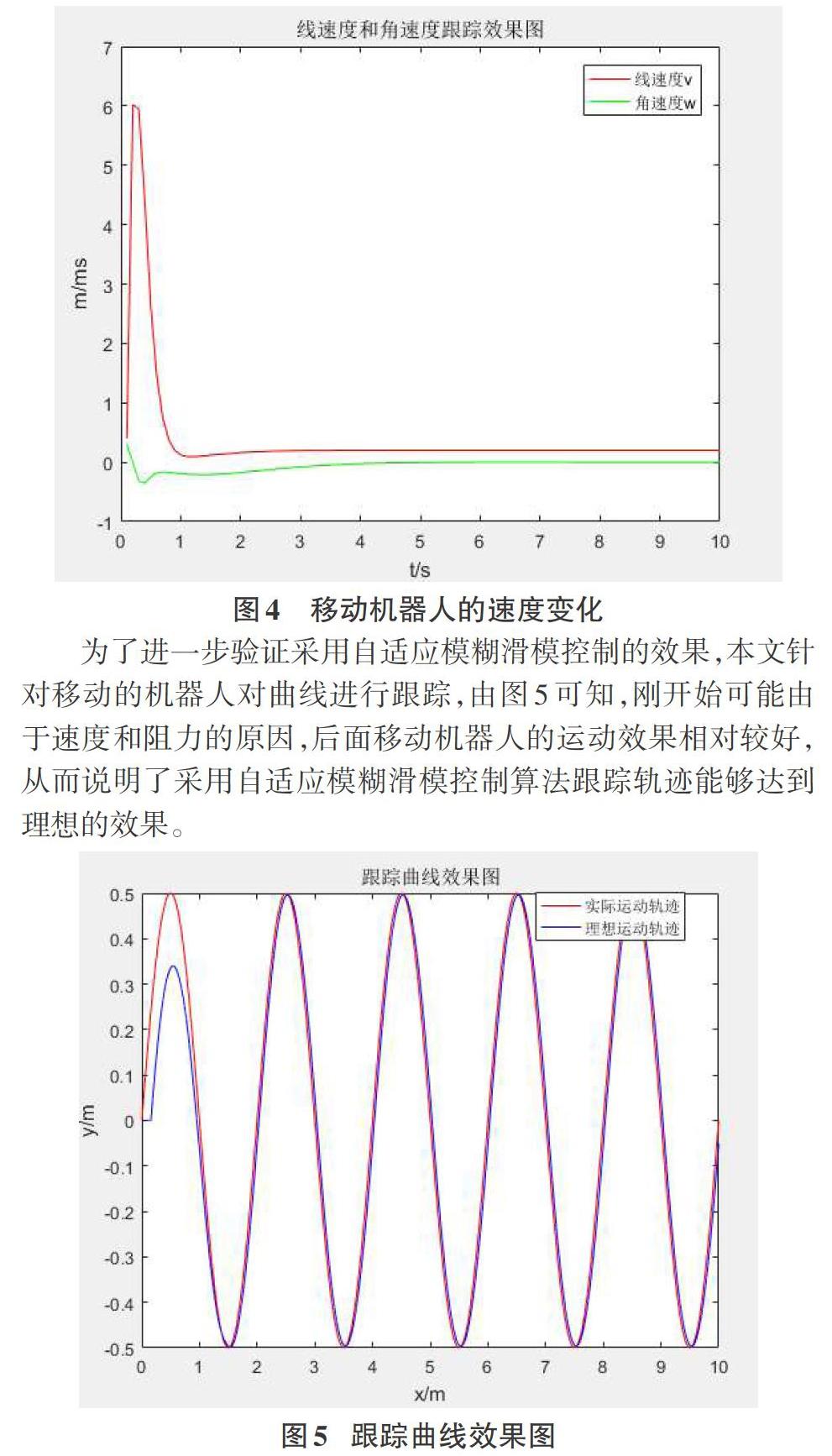
在机器人跟踪运动的过程中,其速度也会发生相应的变化,变化的过程如图4所示。由图4可知,线速度和角速度都会稳定在一个值附近。
为了进一步验证采用自适应模糊滑模控制的效果,本文针对移动的机器人对曲线进行跟踪,由图5可知,刚开始可能由于速度和阻力的原因,后面移动机器人的运动效果相对较好,从而说明了采用自适应模糊滑模控制算法跟踪轨迹能够达到理想的效果。
4 结论
因为移动机器人在运动的过程中存在不确定影响因素,为了更好地跟踪运动轨迹,采用了自适应模糊滑模控制,通过自适应模糊控制能够较好地调整相应的参数,使机器人运动的误差趋于稳定,同时减少了移动机器人不确定因素。仿真结果证明,针对移动机器人的轨迹跟踪问题,自适应模糊滑模控制算法是可行且有效的,该算法能够改善使机器人的运动性能。除此之外,该算法还具有较好的收敛性和鲁棒性,能够有效消除扰动和其他因素的影响。
参考文献:
[1] 尤波,张乐超,李智,等.轮式移动机器人的模糊滑模轨迹跟踪控制[J].计算机仿真,2019,36(2):307-313.
[2] 杨延祥.移动机器人运动规划及跟踪控制研究[D].秦皇岛:燕山大学,2011.
[3] 宋立业,邢飞.移动机器人自适应神经滑模轨迹跟踪控制[J].控制工程,2018,25(11):1965-1970.
[4] 康升征,吴洪涛.全向移动机器人模糊自适应滑模控制方法研究[J].机械设计与制造工程,2017,46(3):70-75.
[5] 张奔奔.移动机器人轨迹跟踪控制[D].西安:西安电子科技大学,2019.
[6] 林旭梅.移动机器人运动轨迹仿真[J].计算机仿真,2014,31(9):387-391.
[7] 白继乐.移动机器人轨迹跟踪的研究[D].沈阳:沈阳工业大学,2016.
[8] 贝旭颖.移动机器人定位与轨迹精度的研究[D].无锡:江南大学,2017.
[9] 赖欣,陆阳,周乐,等.轮式移动机器人的Back-stepping滑模模糊自适应轨迹跟踪控制[J].机械科学与技术,2018,37(12):1834-1840.
[10] 丁力,吳洪涛,李兴成,等.移动机器人的最优轨迹跟踪控制研究[J].机械设计与制造,2020(2):271-274.
[11] 范其明,吕书豪.移动机器人的自适应神经网络滑模控制[J].控制工程,2017,24(7):1409-1414.
[12] 张立阳,陈奕梅.轮式移动机器人轨迹跟踪与避障研究[J].自动化与仪表,2017,32(11):72-76.
[13] 郭一军.非完整轮式移动机器人鲁棒轨迹跟踪控制研究[D].杭州:浙江工业大学,2019.
[14] 冯德军,韦鉴峰.移动机器人轨迹跟踪控制研究及其MATLAB仿真[J].中国高新技术企业,2017(8):25-27.
【通联编辑:唐一东】
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
制造技术与机床(2017年3期)2017-06-23
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
