
基于增材制造的六自由度串联机械臂轻量化设计
2020-12-29 09:20杨永泰曾文浩徐大伟
机械设计与制造工程 2020年12期
吕 鑫,杨永泰,曾文浩,徐大伟
(1.中北大学机电工程学院,山西 太原 030051)(2.中国科学院海西研究院泉州装备制造研究所,福建 泉州 362200)
近年来,随着科学技术的发展和工业生产规模的扩大,机械臂的应用范围不断扩大。然而,较差的工业使用环境和严苛的生产标准对机械臂产品的性能提出了更高的要求。六自由度串联机械臂是应用最为广泛的一种机械臂,广泛应用于工业生产中,在实际应用中如果其自身重力以及部分电机重力过大,不仅会导致末端关节变形较大,还会导致机械臂运动过程中出现抖动现象,从而影响机械臂的运动及定位精度。因此,有必要对机械臂进行轻量化改造,在实现节能的同时,增加机械臂负载能力,提升其动态稳定性能和运动精度。
机械臂轻量化是轻量化技术在机械设计与制造领域应用的典型代表之一。轻量化技术包含3个方面的核心内容,即材料轻量化、结构轻量化以及工艺轻量化。其中,轻量化材料包含高强钢、铝合金、镁合金、高强度工程塑料以及复合材料等[1-5];结构轻量化包含拓扑优化、尺寸优化、形状优化以及形貌优化。近年来,增材制造技术实现了高速发展,该技术能够兼顾高性能和精准成型,可以有效缩短产品生产周期,能够对复杂结构构件进行快速制造且成本较低[6],其已经发展成为高端设备制造的重要技术手段,促使先进设计技术与先进制造技术完美融合。
国内外学者在轻量化设计领域做了大量研究,主要体现在材料轻量化和结构轻量化两方面。胡红舟等[7]使用铝合金波纹板加强结构设计盒形汽车防撞梁,实现了防撞梁轻量化设计的目标。王旭葆等[8]利用拓扑优化和形状优化,对航空铝合金支架进行了结构优化设计,且利用金属增材制造技术实现零件制造,最终质量减轻24.5%、工况加权刚性增加38.3%、最大位移量减少32.7%、总体积减少12.2%。马国庆[9]采用7075-T6铝合金对机械臂进行材料轻量化改造,并对机械臂大臂进行拓扑优化,在提高大臂刚度、增强抵抗变形能力的前提下实现减重15.06%。宁坤鹏[10]对ER300码垛机械臂进行结构轻量化设计,使得机械臂整体减重8.6%,并得到了优化后结构的应力分布与位移分布,结果表明优化后的最大应力与最大位移满足使用要求。还有一些学者在航空航天、汽车工业等领域开展了关于材料轻量化与结构轻量化的研究[11-17]。
综上所述,在机械臂轻量化方面,大多数学者仅对机械臂某个结构进行轻量化设计,且大多只采用材料轻量化或者结构轻量化中的一种轻量化设计方法。综合材料轻量化、拓扑优化、尺寸优化等多种轻量化设计方法,对六轴机械臂整体结构进行轻量化的相关研究较少。为了实现六自由度串联机械臂整体结构的综合优化,本文对比分析了6061铝合金和3D打印塑胶材料两种设计材料,优选3D打印塑胶作为机械臂整体结构的材料,另外采用尺寸优化和拓扑优化相结合的优化方法对机械臂整体结构进行优化,最终通过几何重建和仿真分析,验证轻量化六自由度串联机械臂的整体性能。
1 机械臂结构组成
如图1所示,六轴机械臂的机械部分由基座、6个臂杆和6个转动关节构成。基座安装在工作台上,6个臂杆、6个转动关节依次串联。
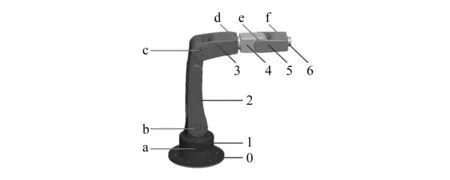
0—底座;1,2,3,4,5,6—臂杆;a,b,c,d,e,f—关节
其中,关节a,d,f可以实现回转运动,关节b,c,e可以实现俯仰运动;关节角依次为θ1,θ2,θ3,θ4,θ5,θ6,如图2所示。通过对6个转动关节的联合控制,使机械臂末端可以在工作空间内达到任意位姿状态。机械臂的D-H参数见表1,其中di为臂杆距离,ai为臂杆长度,αi为臂杆扭角。构型示意如图3所示,机械臂的最大伸展长度为655 mm,最大负载为0.5 kg。
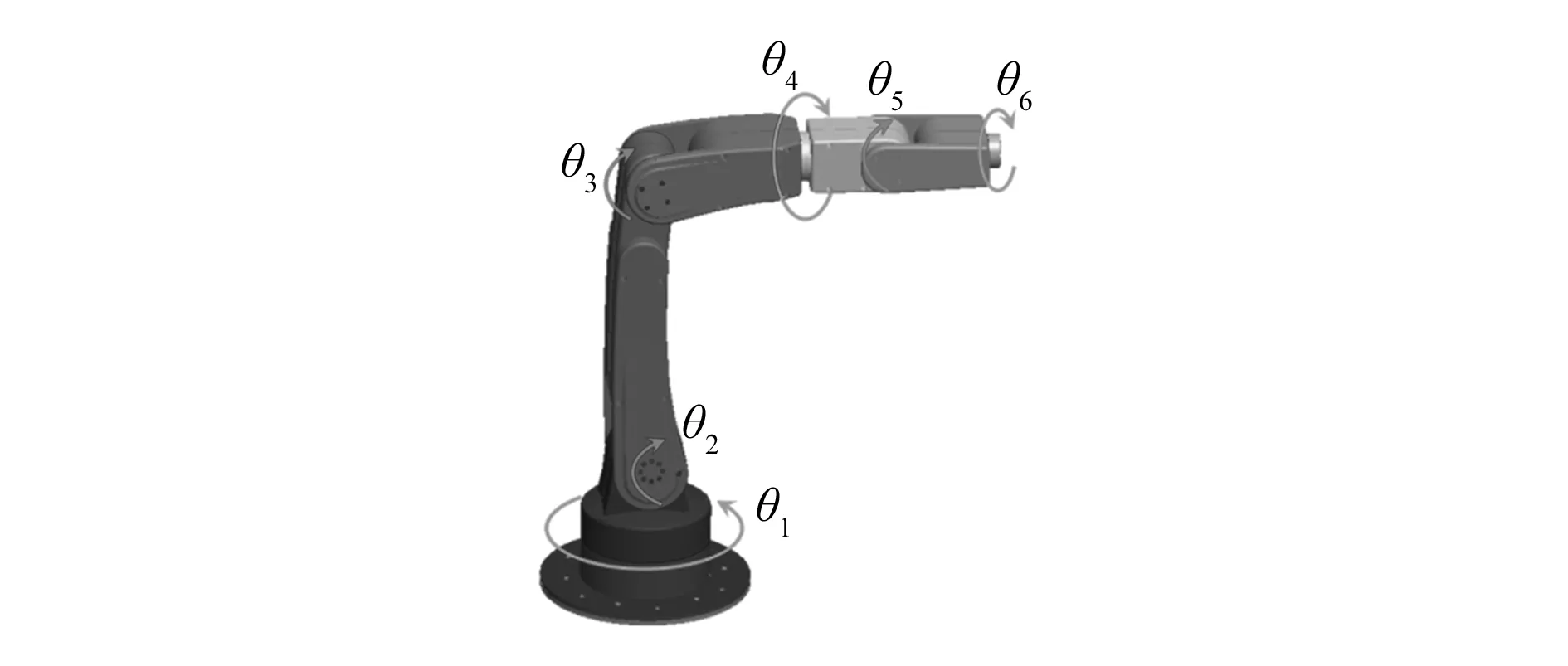
图2 机械臂旋转自由度
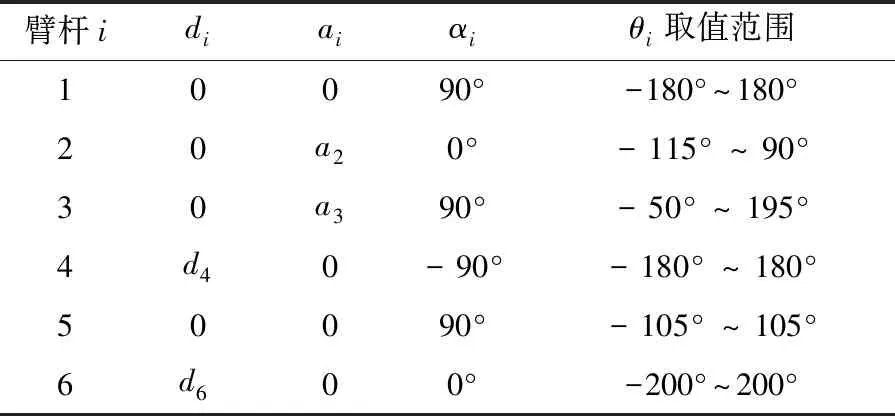
表1 机械臂D-H参数
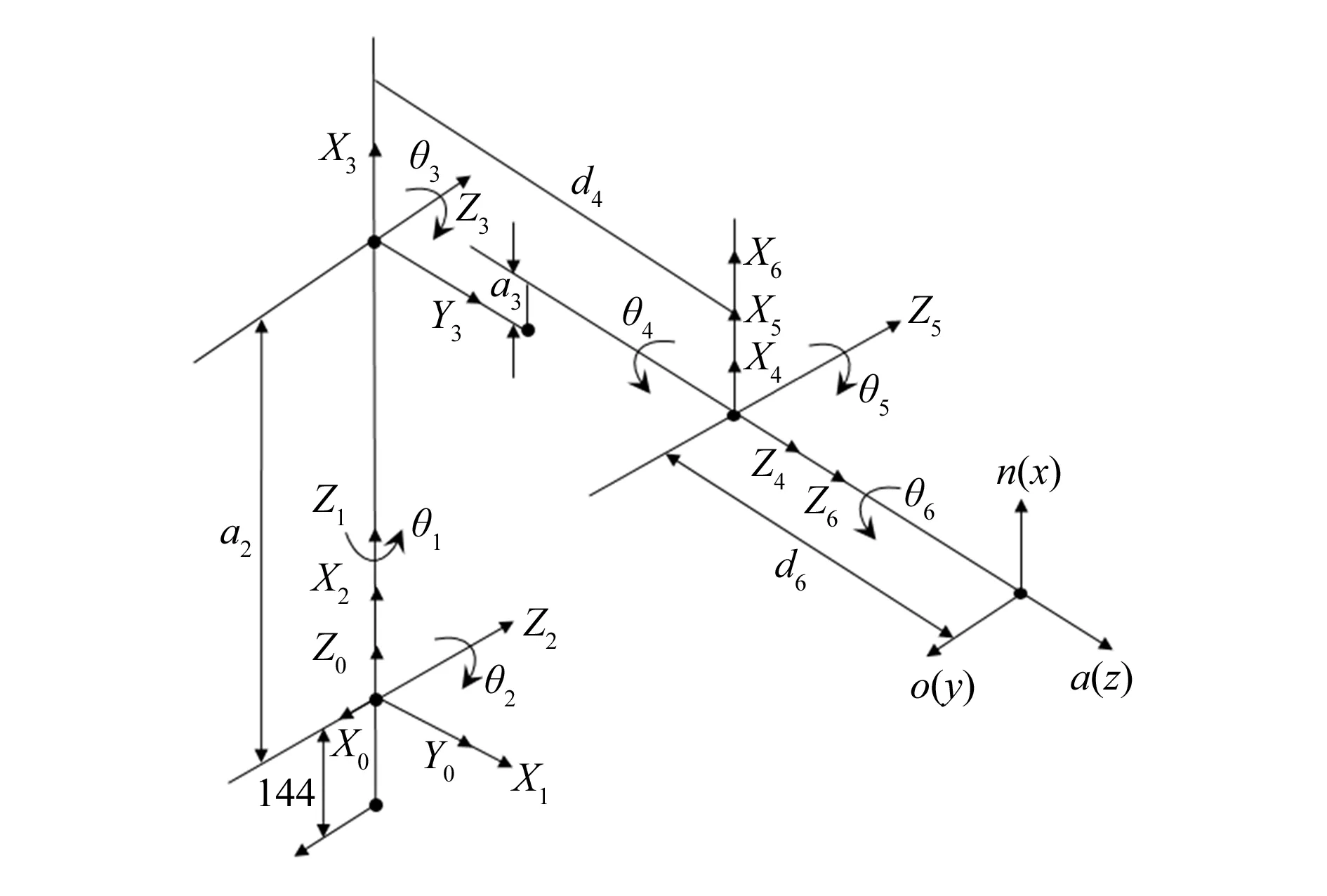
图3 机械臂构型示意图
2 机械臂轻量化设计
2.1 优化问题描述
一个优化问题主要由3个要素构成:优化目标、设计变量、约束条件。用数学模型可表述如下:
(1)

轻量化是一种典型的优化问题。在六轴机械臂主体结构轻量化设计的问题中,优化目标、设计变量以及约束条件分别如下。
1)优化目标:质量最小。
2)设计变量:材料选择,结构形式。
3)约束条件:极限工况下的刚度要求(末端最大位移≤4 mm),极限工况下的强度要求(安全系数≥10)。
采用密度更小的材料是轻量化的一种重要途径。在材料选择方面,6061铝合金和用于3D打印的塑胶材料(visijet_M2R_BK*)的力学参数见表2;在结构轻量化方面,采用尺寸优化和拓扑优化对原有结构进行轻量化改造。机械臂轻量化技术路线如图4所示。
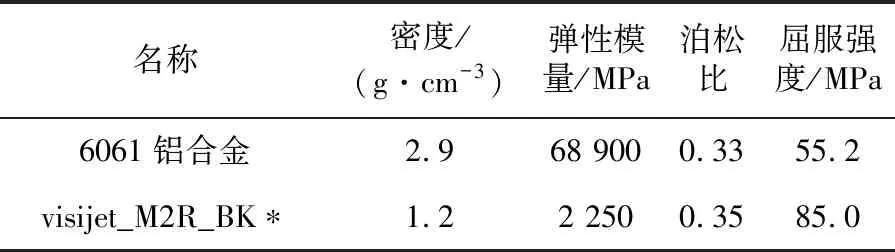
表2 材料力学参数
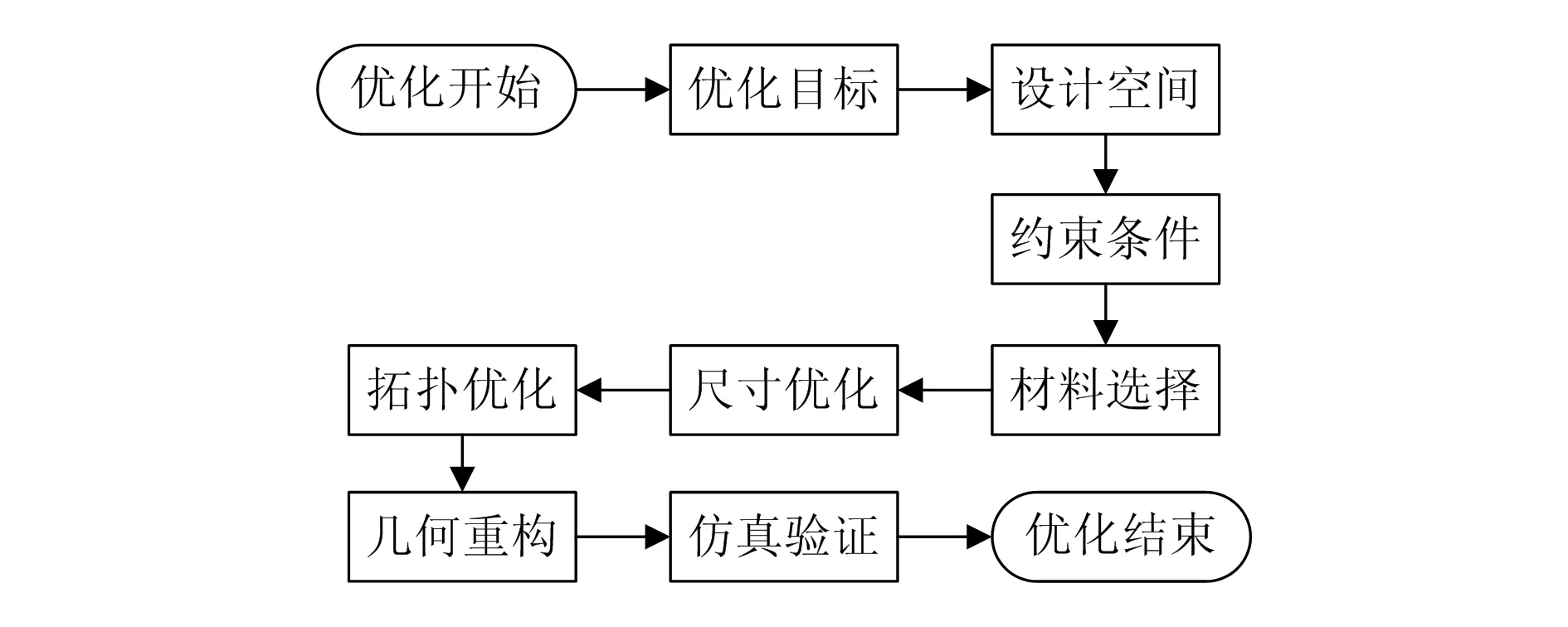
图4 机械臂轻量化路线图
通过对机械臂构型特点进行分析可知:机械臂完全展开水平放置的状态,为一种极限工况,称之为第一极限工况,如图5(a)所示;将关节d旋转90°,得到另一种极限工况,称之为第二极限工况,如图5(b)所示。
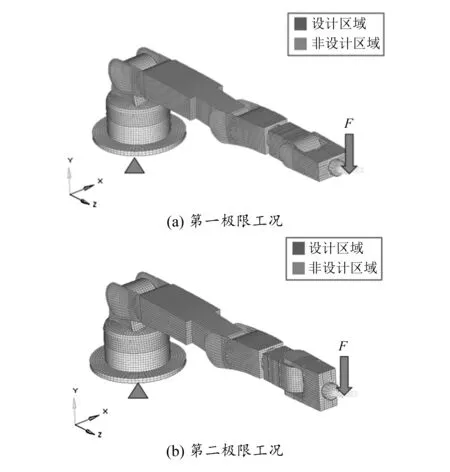
图5 机械臂极限工况
对其施加载荷和约束等边界条件,如图5所示,其中F为末端最大载荷,大小为5 N。底座施加固定约束。
2.2 两种材料对比分析
由机械臂的结构特点可知,极限位置的不同对于结构质量的优化结果影响较小。因此,在第一极限工况下,分别以6061铝合金材料和用于3D打印的visijet_M2R_BK*材料制作机械臂主体结构,进行探索性的拓扑优化。优化设计三要素如下。
1)设计目标:总质量最小。
2)设计变量:设计空间的单元密度。
3)约束条件:末端最大位移≤4 mm。
通过拓扑优化,得到相应的优化结果,如图6、图7所示。
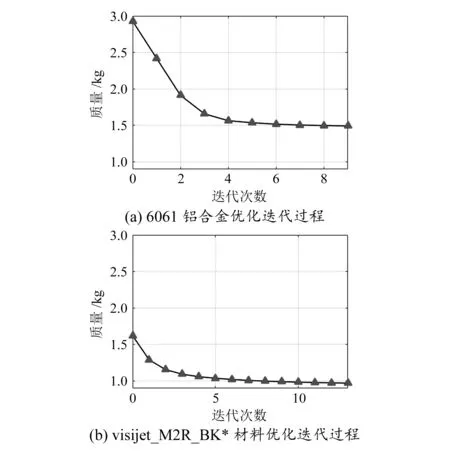
图6 两种材料质量优化对比
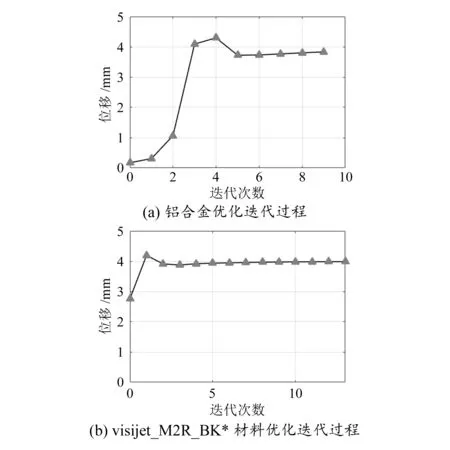
图7 两种材料机械臂末端位移
由优化结果可知,采用6061铝合金的拓扑优化,末端最大位移为3.834 mm,优化后质量为1.492 kg;采用visijet_M2R_BK*材料的拓扑优化,末端最大位移为3.987 mm,优化后质量为0.971 kg。两种材料均满足末端最大位移不超过4 mm的刚度要求,但是优化后质量差别较大,故最终选择使用visijet_M2R_BK*作为机械臂主体结构的材料。
2.3 结构尺寸优化
选定visijet_M2R_BK*作为机械臂主体结构的材料,采用尺寸优化技术,来确定臂杆的最优尺寸。基于第一极限工况,对末端施加2.5 mm(小于4.0 mm的末端最大位移约束条件)的最大位移约束工况进行优化,优化结果如图8所示。优化后,得到臂杆1~臂杆6的厚度依次为5.5 mm、4.3 mm、4.0 mm、3.5 mm、1.3 mm、2.9 mm,满足刚度要求与强度要求,该结果将为后续的拓扑优化提供参考。
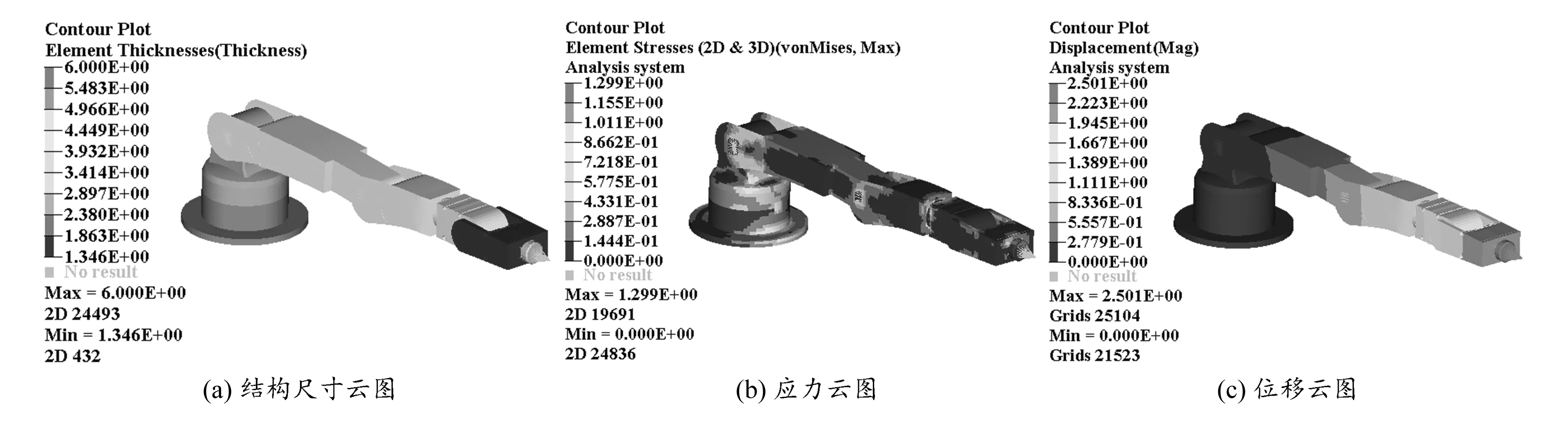
图8 尺寸优化结果
2.4 结构拓扑优化
基于尺寸优化结果,结合非设计区域的结构特点,臂杆1~臂杆6的厚度依次定义为6.0 mm、6.0 mm、3.0 mm、3.0 mm、1.5 mm、2.0 mm,分别对第一极限工况和第二极限工况进行结构拓扑优化,得到结构拓扑云图以及对应的应力云图、位移云图,如图9与图10所示。机械臂在第一极限工况下的最大von Mises应力为2.331 MPa,末端最大位移为3.987 mm;机械臂在第二极限工况下的最大von Mises应力为2.334 MPa,末端最大位移为3.987 mm。综上所述,两种极限位置下的拓扑优化结果均满足设计要求,为结构详细优化提供了重要依据。
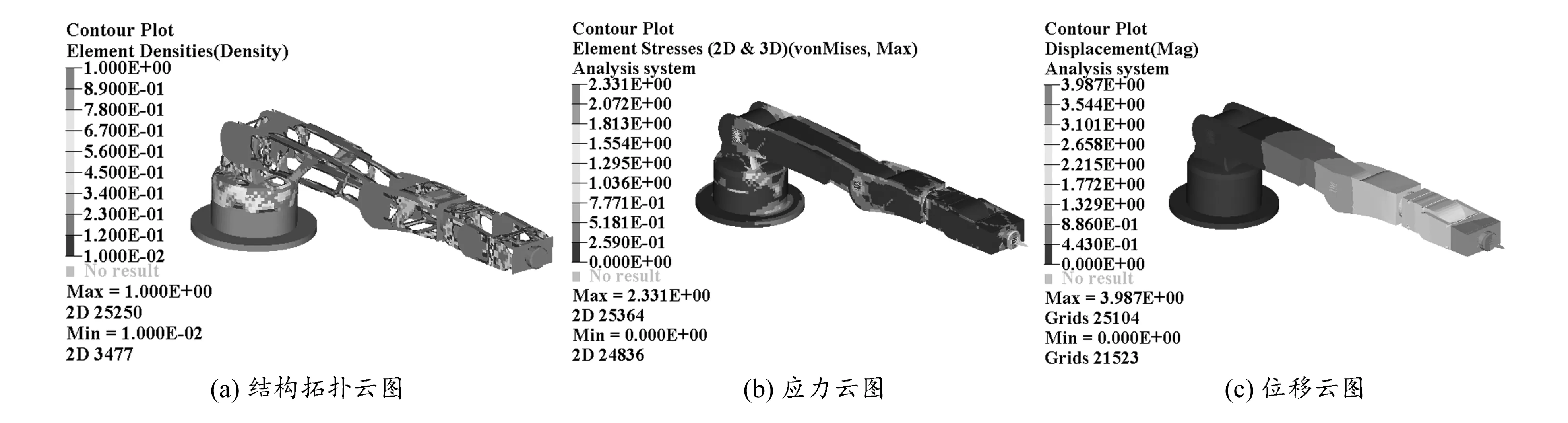
图9 第一极限工况拓扑优化结果
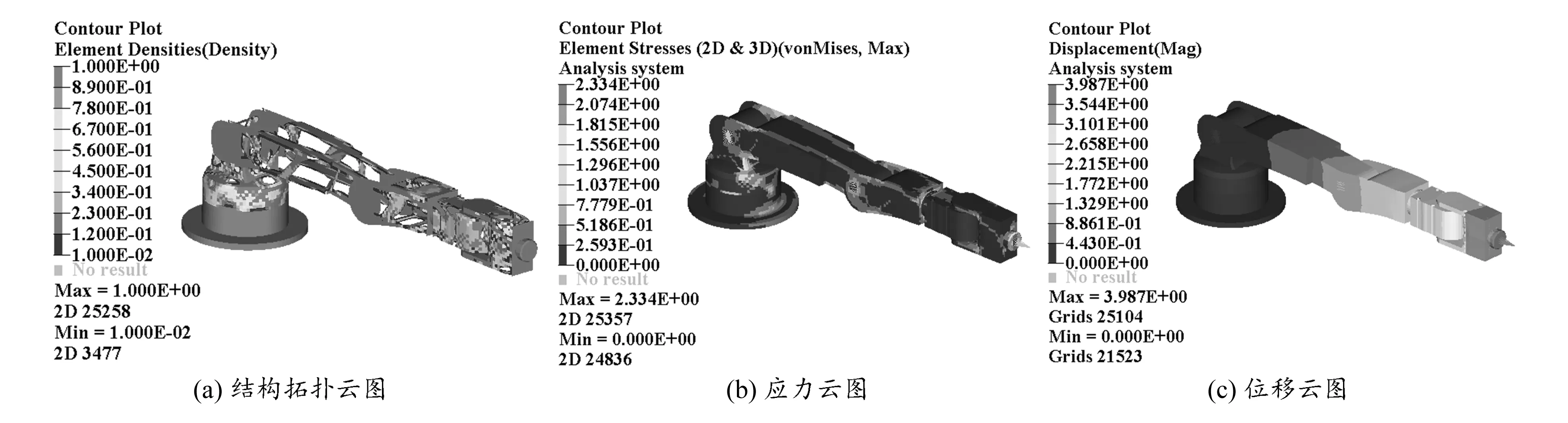
图10 第二极限工况拓扑优化结果
3 几何重构与仿真验证
3.1 几何重构
综合尺寸优化以及拓扑优化的结果,可知对机械臂末端位移影响最大的为臂杆2、臂杆3、臂杆4、臂杆5,故对其几何模型进行修改与重建,去除多余材料,得到如图11所示的各个臂杆的新几何模型以及机械臂整体几何模型。
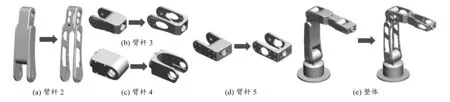
图11 机械臂主体结构新几何模型
3.2 仿真验证
对机械臂主体结构新几何模型进行仿真验证,得到机械臂在两种极限工况下的强度与刚度,如图12、图13所示。
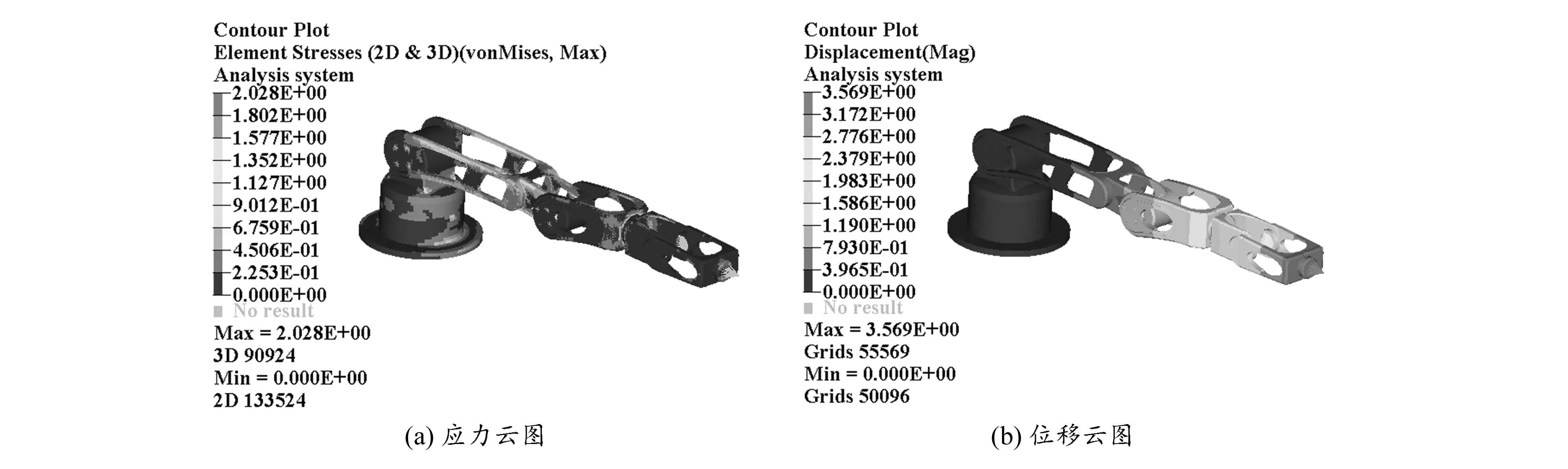
图12 新结构第一极限工况分析结果
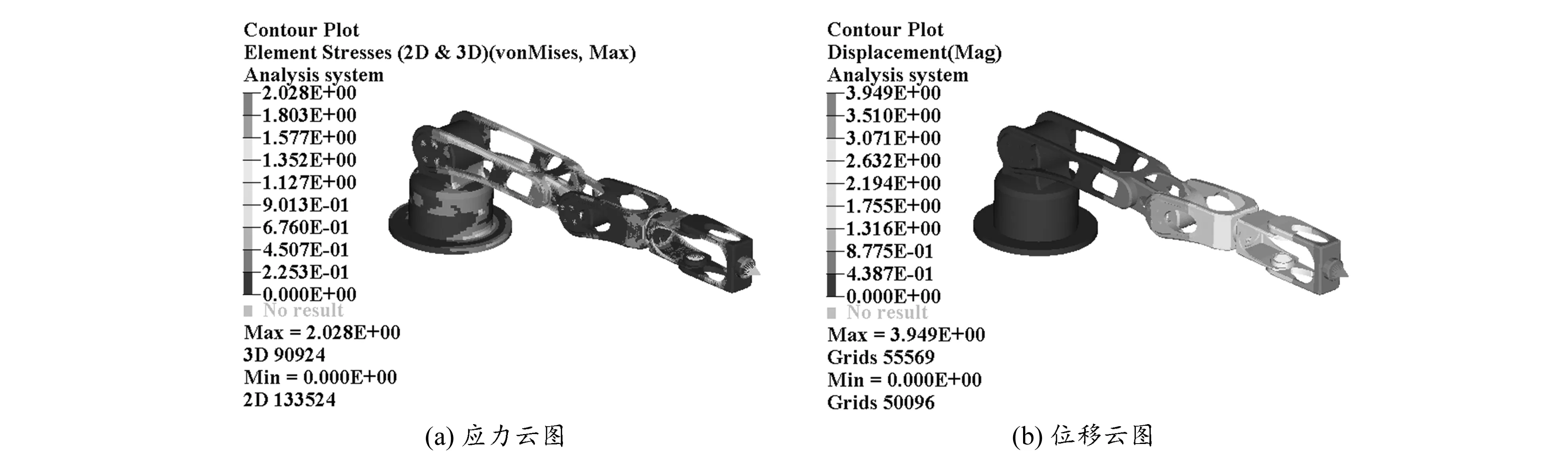
图13 新结构第二极限工况分析结果
由图可知,新结构在第一极限工况下的最大von Mises应力为2.028 MPa,末端最大位移为3.569 mm;新结构在第二极限工况下的最大von Mises应力为2.028 MPa,末端最大位移为3.949 mm。两种极限工况下,机械臂均满足刚度要求与强度要求。机械臂新结构的质量为1.337 kg,较原始模型质量1.818 kg减少了0.481 kg,减重26.5%,达成了轻量化设计的目标。
4 结论
1)通过探索性拓扑优化设计发现,与铝合金相比,以3D打印塑胶为设计材料的六自由度机械臂,在满足末端刚度的同时,质量更小,更有可能实现轻量化目标;
2)与通常采用单一轻量化方法进行机械臂轻量化设计相比,综合运用材料轻量化和结构轻量化设计方法,可以通过材料优选和结构优化,实现刚强度约束下的有效减重;
3)基于轻量化设计结果进行几何重构,通过仿真分析进行验证,结果表明机械臂轻量化设计方案是合理和有效的;
4)基于增材制造的轻量化设计方法,不仅可以用于六自由度串联机械臂优化设计,也可以用于其他机械结构如夹具、工装等的结构设计。
猜你喜欢
精密成形工程(2022年2期)2022-02-22
China’s foreign Trade(2021年6期)2021-12-26
建材发展导向(2021年9期)2021-07-16
舰船科学技术(2021年12期)2021-03-29
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
汽车与新动力(2017年3期)2017-06-29
专用汽车(2016年1期)2016-03-01
中华奇石(2015年7期)2015-07-09
中华奇石(2015年5期)2015-07-09
