智能网联环境下复杂异质交通流稳定性解析
2021-01-04 09:35汪一戈崔洪军朱敏清王欣桐
交通运输系统工程与信息 2020年6期
李 霞,汪一戈,崔洪军,朱敏清,王欣桐
(河北工业大学土木与交通学院,天津300401)
0 引 言
随着新型基础设施建设(简称:新基建)等国家相关政策与战略的提出,智能网联车辆迎来了新机遇和新挑战.在网联汽车大规模涌入道路之前,市场必然会经历普通车辆与网联车辆构成的异质交通流过渡时期,此时,异质交通流稳定性直接反映交通流运营状况和质量.当异质交通流处于稳定状态时,车速均相等,加速度均为0;而不稳定的交通流会产生时走时停的交通状态,易引发交通拥堵[1].车联网通信网络主要包括车对车(Vehicleto-Vehicle,V2V)和车对基础设施(Vehicle-to-Infrastructure,V2I)两种方式[2],基于不同V2V/V2I通信技术的网联车辆对交通流稳定性的影响各不相同,将形成基于多种通信方式的车辆共存的复杂局面.因此,异质交通流稳定性和混有不同通信技术的网联车辆对异质交通流稳定性的影响,已成为智能交通领域的研究热点.
国外研究混有网联车辆的异质交通流稳定性工作起步较早.大部分研究是网联车辆和普通车辆分别选择能表征各自特点的跟驰模型,研究两者构成的异质交通流稳定性[3-7],通过理论解析[3-5]或仿真分析[6-7]表明网联车辆能够提高交通流的稳定性.但不同V2V/V2I 通信技术的网联车辆会表现出不同的跟驰特性,且互相影响,目前缺乏基于不同通信技术的网联车辆与普通车辆构成的异质交通流稳定性研究.Talebpour 等[8]提出了一个架构,分析混有网联车辆和自动驾驶车辆的异质交通流稳定性和通行能力.但该研究未针对不同跟驰特性的网联车辆选择不同的跟驰模型,且未考虑基于不同V2V/V2I通信方式的网联车辆对异质交通流稳定性的影响.国内相关研究多应用李雅普诺夫理论或传递函数理论,分别进行不同网联车辆比例下的异质交通流稳定性解析,并选取具体模型进行案例分析[1,9-10],但缺少使用不同模型分别表示基于V2V、V2V/V2I的网联车辆.
综上所述,考虑不同V2V/V2I 通信技术网联车辆的研究较少,鲜有文献针对混有基于V2V、V2V/V2I 的网联车辆的复杂异质交通流稳定性进行研究.鉴于此,本文以基于V2V 的网联车辆、基于V2V/V2I的网联车辆和普通车辆共存的异质交通流为研究对象,分别推导其代表性跟驰模型在不同平衡态速度,不同比例下异质交通流的稳定性条件及稳定域,并进行数值仿真,验证理论解析的正确性.依据研究结果,网联车辆的V2I 通信有亟待实现的必要,且基于不同通信技术网联车辆的投入比例对宏观交通流稳定性具有指导意义.
1 跟驰模型
1.1 普通车辆跟驰模型
Bando 等[11]提出优化速度模型(Optimal Velocity Model,OVM)反映驾驶员基于本车速度和车间距优化自身速度.该模型应用十分广泛,表达式为

式中:an(t) 表示车辆n在t时刻的加速度;k为驾驶员对前车的敏感系数,本质上1k可视为隐含的反应时间;vn(t) 表示为车辆n在t时刻的速度;Δxn(t)为车辆n与前车在t时刻的车头间距;V[Δxn(t)]表示最优速度函数,即

式中:v0为自由流速度;α为敏感系数;L为车长;s0为最小停车间距.
文献[12]的参数标定结果为:k=0.700 s-1,v0=33.0 m⋅s-1,α=0.999 s-1,s0=1.62 m,L=5 m.其标定误差为4.06%,可用于本文的研究.根据文献[9],本文假设普通车辆均安装车车通信设备,故前方普通车辆的相关信息可被后方网联车辆检测到,但不能接收其他车辆的通信.
1.2 网联车辆跟驰模型
本文研究的智能网联车辆处于SAEJ3016 标准的L2 和L3 级别之间,具体表现为:在辅助驾驶系统下,部分网联车辆仅进行V2V通信,部分车辆可进行V2V/V2I通信.此外,网联车辆的反应延迟均忽略不计.
1.2.1 基于V2V的网联车辆跟驰模型
通过V2V 通信,协同自适应巡航控制(Cooperative Adaptive Cruise Control,CACC)车辆应用车车无线通信技术,可获取前车行驶状态(如速度、加速度、车头间距和位置等),从而自动调整当前车辆[8].加州大学伯克利分校PATH 实验室通过真车实验,获取真车轨迹数据,描述了CACC车辆恒定车间时距的跟驰特性,验证该模型适用于真实CACC的研究[13],表达式为

式中:vp为上一时刻的速度;kp和kd为控制系数;e为实际车间距和期望车间距的误差项;为e的导数形式;s1为最小安全间距;tc为期望车间时距.
对式(3)的速度项进行一阶泰勒展开,可得

式中:Δvn(t)为车辆n与前车在t时刻的速度差;Δt为时间间隔.由文献[13]可得相关参数取值:kp=0.45,kd=0.25,tc=0.6 s,Δt=0.01 s,s1=2 m.
1.2.2 基于V2V/V2I的网联车辆跟驰模型
考虑到V2V/V2I 通信网络中的信息流,驾驶员对其他驾驶员的行为是确定的,且了解当前位置下游的驾驶环境、道路状况和天气状况等.因此,一个确定性加速模型适合对这种环境进行建模[8].Treiber 等[14]提出智能驾驶员模型(Intelligent Driver Model,IDM)包含自由状态下的加速趋势和考虑与前导车碰撞的减速趋势,并可反映驾驶员在准确获悉前车行驶状态时的跟驰特性.文献[8]认为IDM 模型适合描述基于V2V/V2I 的网联车辆,表达式为
式中:a为最大加速度;s*[vn(t),Δvn(t)]为车辆n与前车在t时刻的期望车头间距;T为安全车头时距;b为舒适减速度.根据文献[8],各参数取值为:a=4.0 m⋅s-2,v0=33.0 m⋅s-1,T=2.0 s,b=2.0 m⋅s-2.
2 异质交通流稳定性解析
2.1 跟驰模型稳定性判别
跟驰模型表达式为

式中:fn表示车辆的跟驰模型公式;vn(t),Δvn(t),Δxn(t)分别表示速度、速度差、车头间距.
跟驰模型有众多线性稳定性判别方法,文献[15]给出了跟驰模型的不稳定条件,表达式为

式中:Q为跟驰模型不稳定性判别值;fv,fΔv,fΔx分别表示跟驰模型fn关于速度、速度差、车头间距的偏微分.若式(8)成立,则表示交通流不稳定.
针对式(1)、式(3)、式(5),求出各模型对速度、速度差、车头间距项的偏微分,其中,OVM表示为;CACC 表示为;IDM 表示为
将式(9)~式(11)分别代入式(8),得各跟驰模型的不稳定性条件QO、QC和QI,代入相关参数可得QC=1.248>0 恒成立,则在速度范围0.0~33.0 m·s-1内,CACC 模型均处于稳定状态;画出QI和QO关于速度v的变化图,如图1所示.
由图1可知:QI>0,则IDM 模型在任意速度(0.0~33.0 m·s-1)下均稳定.OVM 模型在速度范围21.5~33.0 m·s-1内,QO>0,即车辆行驶稳定;在速度范围0.0~21.5 m·s-1内不稳定,这表明普通车辆经常会出现不稳定性状态.因此,网联车辆在市场完全普及之前,有必要探讨混有网联车辆的异质交通流的稳定性.
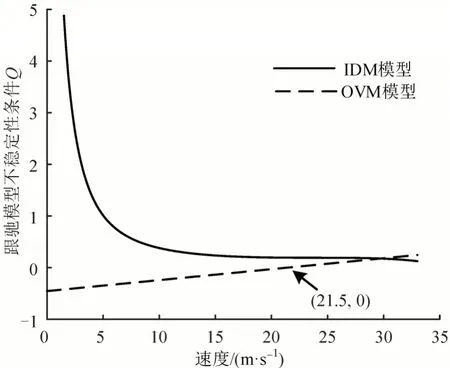
图1 跟驰模型稳定性Fig.1 Stability of car-following model
2.2 异质交通流不稳定性条件
文献[15]推导异质交通流不稳定性条件为
式中:F表示异质交通流不稳定性判别值;M表示异质交通流中不同类型车辆的数量;Pi表示在整个系统中第i种交通流的比例,i=1 表示网联车辆,i=2 表示普通车辆;分别表示第i种车辆跟驰模型fn关于速度、速度差、车头间距的偏微分.若式(12)成立,则表示网联车辆与普通车辆构成的异质交通流不稳定.
设网联车辆数量占总车辆数的比例为P,0≤P≤1,普通车辆比例为1-P.因此,网联车辆与普通车辆构成的异质交通流不稳定性条件为

式中:F1,F2分别表示异质交通流中的网联车辆、普通车辆.
因速度范围为21.5~33.0 m⋅s-1时,F1>0,F2>0,则F>0 恒成立,故后续只研究速度范围在0.0~21.5 m⋅s-1的情况.
2.3 异质交通流稳定域求解
由式(13)可以计算不同平衡态速度v(0.0~21.5 m⋅s-1)、不同网联车比例P(0~1)与异质交通流稳定性判别值F之间的关系,得到异质交通流稳定域.当网联车辆分别为基于V2V 的网联车辆和基于V2V/V2I 的网联车辆时,普通车辆和两种不同通信技术的网联车辆构成的异质交通流稳定域分别如图2和图3所示.图2和图3中,黑色区域表示异质交通流处于不稳定状态,白色区域表示处于稳定状态.
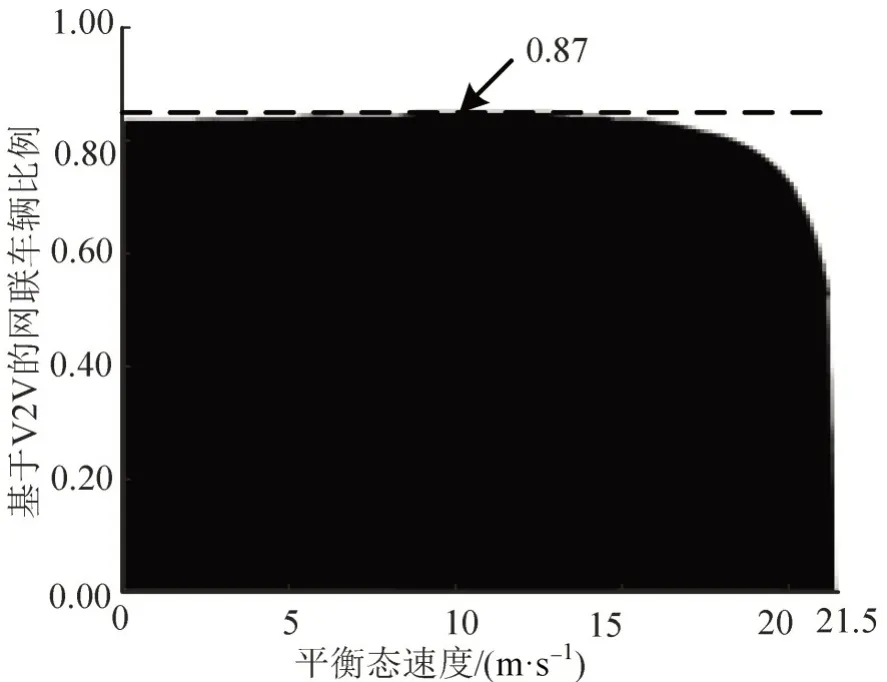
图2 混有基于V2V 网联车辆的异质交通流稳定域Fig.2 Stability region of heterogeneous traffic flow mixed with V2V-based connected vehicles
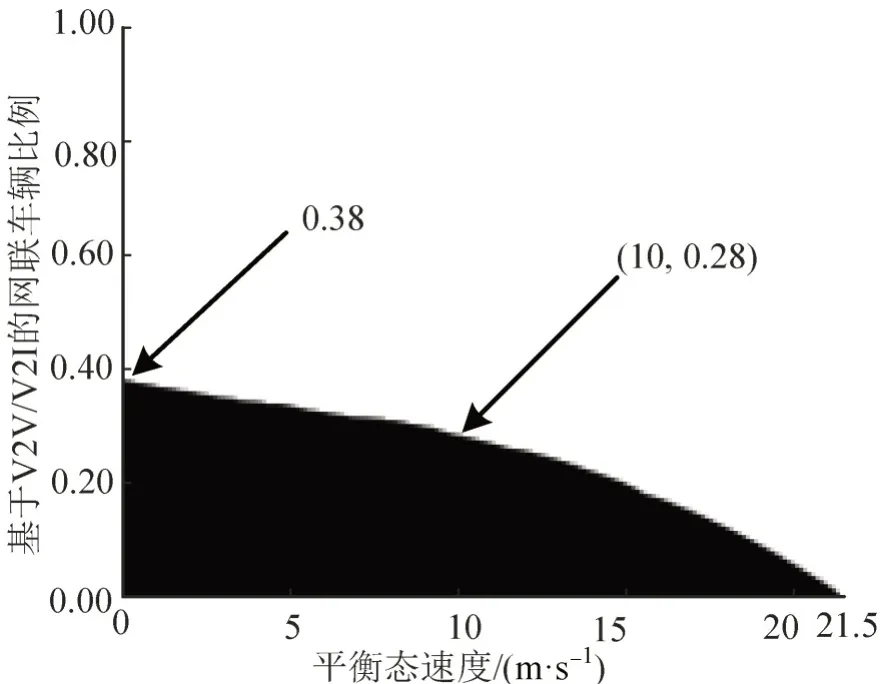
图3 混有基于V2V/V2I网联车辆的异质交通流稳定域Fig.3 Stability region of heterogeneous traffic flow mixed with V2V/V2I-based connected vehicles
图2中,当基于V2V网联车辆比例分别为0或1 时,同质交通流在0.0~21.5 m⋅s-1速度范围内分别处于均不稳定和均稳定状态,与前文跟驰模型稳定性分析结果一致;当基于V2V 的网联车辆比例逐渐增加至临界值PL=0.87 时,F=0,异质交通流由不稳定状态过渡为稳定状态.由图3可知,当基于V2V/V2I 的网联车辆比例大于0.38 时,异质交通流在任意速度下均处于稳定状态;图中坐标(10,0.28)表示速度为10 m⋅s-1时,基于V2V/V2I的网联车辆比例临界值为0.28.综合图2和图3可知,相对基于V2V的网联车辆,混有基于V2V/V2I网联车辆的异质交通流稳定性更优.此外,基于不同V2V/V2I通信技术的网联车辆对交通流稳定性的影响各不相同,有必要对多种通信方式车辆共存的复杂情形进行研究.
3 复杂异质交通流稳定性解析
3.1 复杂异质交通流稳定性判别
基于V2V、V2V/V2I 网联车辆与普通车辆共同作用下的异质交通流进行稳定性解析.令基于V2V网联车辆和基于V2V/V2I网联车辆分别占总车辆数的比例为P1和P2,则普通车辆比例为1-P1-P2,0≤P1≤1,0≤P2≤1,0≤1-P1-P2≤1.因此,由式(12),两种通信方式的网联车辆与普通车辆构成的异质交通流不稳定性条件为

式中:FC、FI和FO分别表示为基于V2V 网联车辆、基于V2V/V2I网联车辆和普通车辆.
3.2 复杂异质交通流稳定域求解
由式(15)可得基于V2V 网联车辆比例P1(0~1)、基于V2V/V2I 网联车辆比例P2(0~1)与平衡态临界速度值v(0.0~21.5 m·s-1)的关系,如图4所示.其中,任何低于平衡态临界速度值的速度均将使异质交通流不稳定.要使0≤P1≤1,0≤P2≤1 且0≤1-P1-P2≤1,则图4右上角黑色三角形区域无意义,对应的色度条表示为N/A.
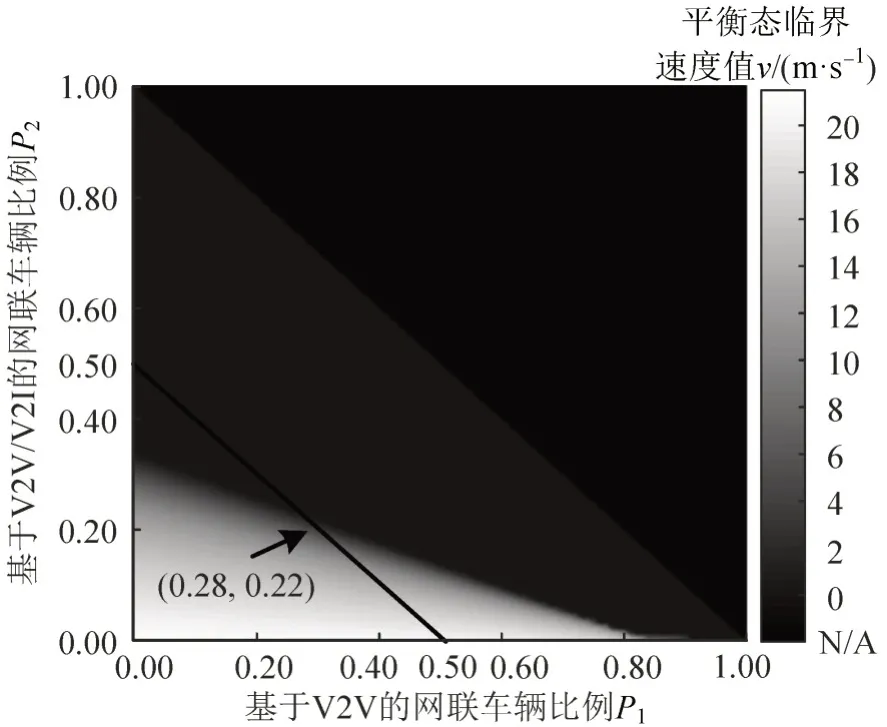
图4 混有多种通信方式的网联车辆在不同比例下的平衡态临界速度值Fig.4 Critical velocity of equilibrium at different proportion rates of connected vehicles with multiple communication methods
由图4可知:
(1)当P1=0 时,随着基于V2V/V2I 网联车辆比例P2逐渐增加,平衡态临界速度值逐渐减小,稳定性逐渐提高;当P2=0 时,随着基于V2V网联车辆比例P1逐渐增加,平衡态临界速度值变化幅度不大,稳定性改变效果不显著,这一结果与2.3 节分析结果一致.
(2)在混有两种通信方式网联车辆的异质交通流中,基于V2V 网联车辆比例较低时不会导致显著的稳定性改善,而基于V2V/V2I 网联车辆即使在低比例时,稳定性也会得到明显改善,两种基于不同通信技术的网联车辆在高比例时均可明显改善交通流稳定性.
(3)当基于V2V网联车辆比例较低时,平衡态临界速度值随着基于V2V/V2I网联车辆的比例增加近似呈线性减小.
(4)图中黑色直线表示不同通信方式的网联车辆比例总和为0.5,普通车辆比例为0.5 时,不同通信方式网联车辆比例与平衡态临界速度值的关系.该直线上坐标(0.28,0.22)表示在普通车辆比例为0.5 的情况下,基于V2V 网联车辆比例为0.28,基于V2V/V2I 的网联车辆比例为0.22 时,异质交通流从不稳定状态过渡至稳定状态,即若要使异质交通流为稳定状态,则要求基于V2V/V2I 网联车辆的比例至少为0.22.因此,基于不同通信技术网联车辆的投入比例对宏观交通流稳定性具有指导意义.
4 数值仿真
针对基于多种V2V/V2I 通信技术网联车辆和普通车辆构成的复杂异质交通流进行稳定性数值仿真实验.根据文献[1],数值仿真对40 辆车组成的车队进行实验,车队由两种通信方式的网联车辆与普通车辆组成,普通车辆比例为0.5,基于V2V/V2I网联车辆的比例P0(0≤P0≤0.5),则基于V2V网联车辆的比例为0.5-P0,各车辆相对空间位置和相对数量均具有随机性.实验按照以下规则进行:车队初始平衡态速度为15 m·s-1,对头车设置加速度扰动a0=-0.5 m·s-2打破整个交通系统的平衡,扰动持续2 s;然后,头车以恒定速度14 m·s-1继续行驶,直至仿真结束;仿真时间400 s,仿真步长0.1 s,实验平台基于MATLAB软件.数值仿真结果如图5所示.
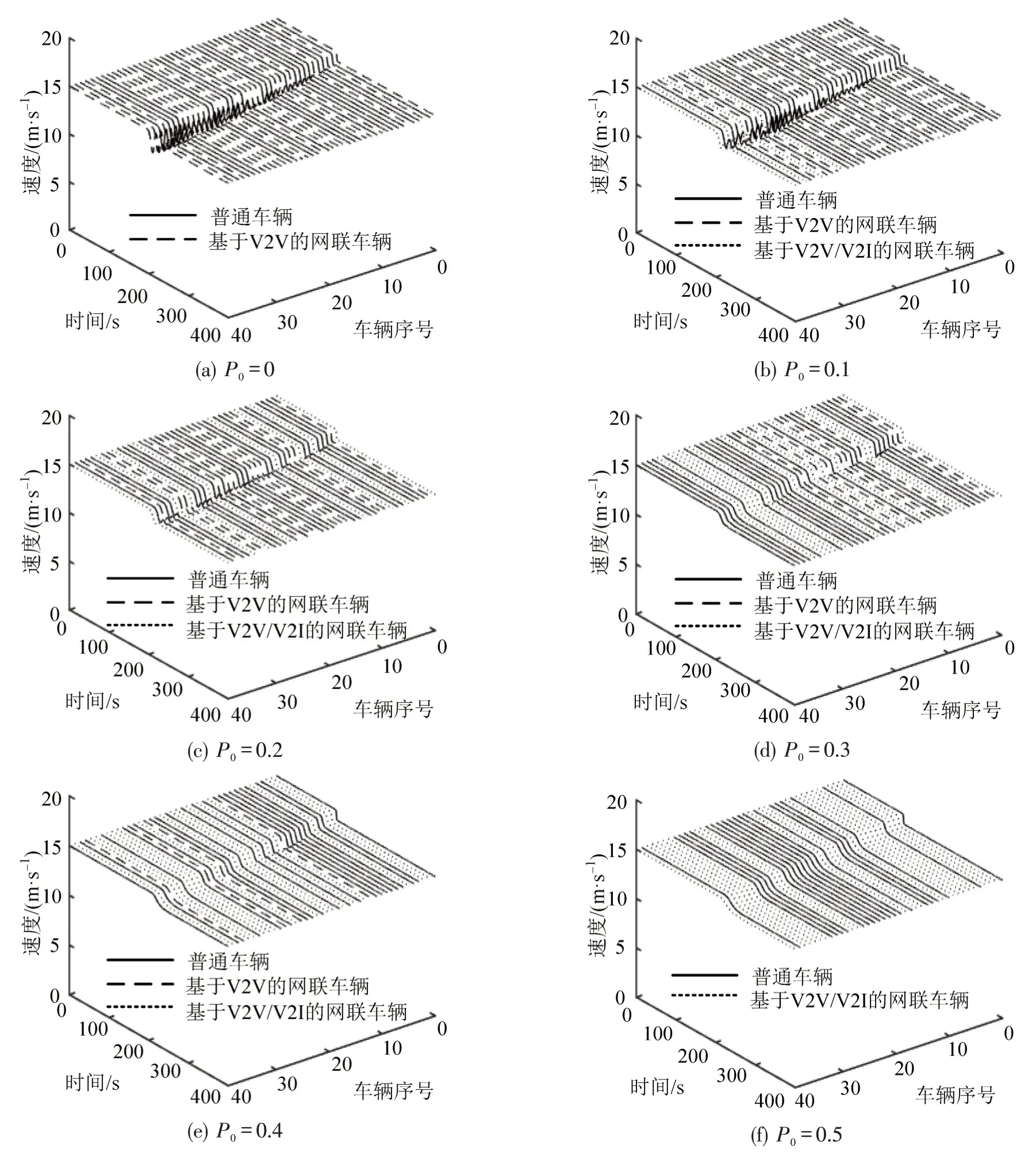
图5 数值仿真结果Fig.5 Numerical simulation results
基于V2V/V2I 网联车辆的不同比例分析异质交通流各车辆速度随时间的变化情况.由图5可知:基于V2V/V2I 的网联车辆比例约为0.2,基于V2V网联车辆比例约为0.3时,异质交通流从不稳定状态过渡至稳定状态;当基于V2V/V2I 网联车辆比例约高于0.2时,异质交通流均处于稳定状态.这与图4中当普通车辆比例为0.5 时,要使得异质交通流为稳定状态,则要求基于V2V/V2I 网联车辆的比例至少为0.22基本一致.
5 结 论
本文考虑不同V2V/V2I 通信技术的网联车辆,针对网联车辆与普通车辆构成的复杂异质交通流进行稳定性分析,通过数值仿真实验进行验证.结论表明:相较于基于V2V 网联车辆,基于V2V/V2I 网联车辆混入对异质交通流稳定性改善效果更显著.在两种基于不同通信技术的网联车辆与普通车辆共同作用下,基于V2V/V2I 网联车辆在任意比例下均能显著改善稳定性,而基于V2V 网联车辆在较低比例时不会显著改善稳定性;当基于V2V网联车辆比例较低时,平衡态临界速度值随着基于V2V/V2I网联车辆比例增加近似呈线性减小.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
内燃机与配件(2022年2期)2022-01-17
北方论丛(2021年2期)2021-05-22
金融经济(2017年9期)2017-09-13
中国公共安全(2017年9期)2017-02-06
中国机械(2016年6期)2016-06-21
中国工程咨询(2016年1期)2016-02-14
云南师范大学学报(自然科学版)(2015年5期)2015-12-26
中央民族大学学报(自然科学版)(2015年2期)2015-06-09