基于自动化接受度模型的车外交互研究
2021-01-11 14:03张碧含
图学学报 2020年6期
张碧含,由 芳
基于自动化接受度模型的车外交互研究
张碧含,由 芳
(同济大学艺术与传媒学院,上海 201804)
随着科技的不断进步,新技术不断进入人们的生活,自动驾驶驾驶技术也得到了快速的发展。但单纯的技术提高并不能带来人们接受度的随之增加。为了提高人们对无人驾驶技术的接受度,对自动化接受度模型进行研究,探究如何从认知接受度提升的角度改善自动驾驶座舱的人机交互,并从接受度模型的核心影响因素的角度分析车外人机交互用户体验问题。通过分析半封闭场景下车外交互的使用场景及行人与无人车交互时的用户行为,归纳出行人行为特征模型,再结合自动化接受度模型的相关研究,从信任度、协作性的角度提升车外交互的有效性和认知接受度。基于自动化接受度AAM模型提出了符合行人行为特征和认知的车外人机交互策略,从而提高沟通效率和接受度。
自动化接受度模型;车外交互;人机界面;设计策略
随着科技的不断发展,现有的低级别辅助驾驶将逐渐被高级别辅助驾驶乃至自动驾驶取代[1],交通环境的技术变革很可能伴随着社交化的变革[2]。传统的司机与行人的隐式通讯方式(如通过眼神和手势交流)将不再适用[3]。在许多情况下,不会有正式的交流渠道来替代官方的规章制度或标准化的信号[4]。在手动驱动、半自动和全自动车辆同时运作的环境中,为了保障交通参与者的安全,需要先进的人机交互界面来告知车辆的当前状态和即将产生的行为。与此同时,单纯的技术提高并不能带来接受度的随之增加。所以,如何提高人们对于自动化技术的接受度仍是一个有待解决的问题。
1 自动化接受度模型
自动化接受度模型(automation acceptance model,AAM)将接受度模型(technology acceptance model,TAM)与自动化的使用进行了整合[5],用来描述用户在自动化系统中接受度的变化和影响因素。TAM模型是Davis于1989年对信息系统接受度进行研究时所提出的模型。感知有用性和感知易用性是模型中的决定性变量。其中,感知有用性(perceived usefulness,PU)是指用户主观上认为通过使用该系统对提高自己的工作业绩的影响程度。感知易用性(perceived ease of use,PEOU)是指用户认为系统在多大程度上容易使用[6],即用户对信息系统在使用过程中难易程度的评估,既可以通过调节感知有用性间接影响和决定行为态度,也可以直接作用于用户的行为态度[7]。实际使用行为是由行为意向决定的。
AAM模型在TAM模型结构的基础上加入了兼容性,如图1所示。兼容性是指用户、技术、任务表现和情境之间的匹配程度[8]。更具体地说,兼容性是衡量技术与用户价值观、过去经验和需求的一致性的指标。另一加入AAM模型的影响因素是信任,信任也被认为是行为意愿Bl的直接决定因素,其在人工智能时代是非常具有价值的。正如信任加强了人与人之间的关系,人们也会倾向于使用一个他们信赖的系统[9]。校准不当的信任会影响人们对新技术的接受度,如果系统过度信任(自满),即自动化程度很高却可靠性不强,会导致用户误用或弃用[10]。针对新技术的设计应该是可信的,技术上可行并与任务相匹配并且容易被理解。
2 基于场景的行人行为研究
2.1 设计背景
随着技术的不断增长和普及,人类与技术的关系成为日常生活中十分重要的组成部分。自动化系统正在逐渐改变人类在社会中的角色。自动化系统的表现取决于人与自动化系统之间建立的关系。本文首先通过绿野仙踪的方法模拟常见的行人—无人物流车的交互场景(图2)。在该阶段通过制作无人小车的原型和在车身上安装Gopro 的方式记录行人的反应。
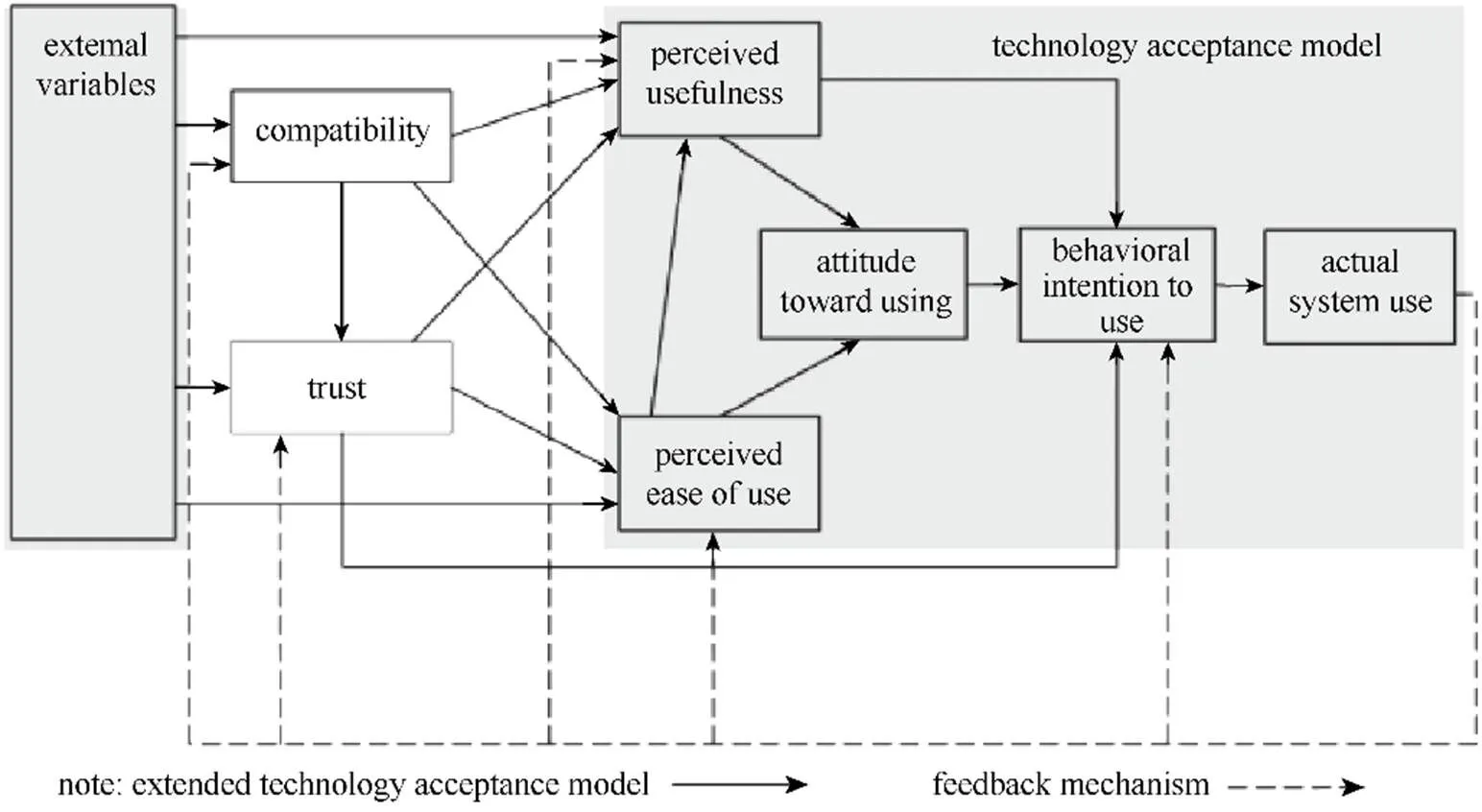
图1 自动化接受度模型AAM

图2 绿野仙踪法模拟无人车与行人交互的场景
2.2 行人-无人车交互深度访谈与用户研究
访谈与调研主要从3个角度出发,涉及基础信息:比如对无人车的了解程度;行驶问题:会通过关注哪些信息来判断自己是安全的以及哪些行为会让你感觉威胁到了你的人身安全或者无法接受;认知问题:哪些因素会影响你对无人车的接受程度等。由于用户对L4级别的自动驾驶座舱了解较少,直接从用户获取具体的需求较为困难,因此在进行用户研究时,主要通过对比正常驾驶场景与无人驾驶场景,再配合让用户观看指定场景下的模拟驾驶视频的方式,调查用户在交互过程中的直接需求,以及遇到的痛点与期望。
根据线上调查问卷和访谈完成定量定性数据获取及分析,部分结果如图3所示。通过线上的方式招募符合要求的被试者,考虑封闭园区作为模拟场景,最终样本数量为156,年龄主要集中在18~30岁,有4个样本年龄为35岁以上,(=22.3,=6.25)。在此基础上对用户进行了分组,将对无人车较为了解并有过实际接触的定义为专家用户,将听说过无人车但只停留在概念层面的用户定义为普通用户,将从未接触并听说过无人车的用户定义为新手用户。从中选择2名专家用户、2名普通用户及1名新手用户进行深度访谈。
2.3 行人-无人车行为特征研究及需求分析
根据前期绿野仙踪法的实景走查及问卷调研和用户深度访谈得出用户作为道路参与者在道路上遇见无人车时的情境场景的相关信息,并借助用户旅程映射对信息进行归纳整理(表1)。
将行人与无人车的交互过程及行为划分为4个阶段,每个阶段包括多个子行为。在行驶阶段行人和无人车都在道路上行驶,由于距离较远,不会发生过多的交集;提示注意阶段无人车和用户的彼此识别阶段,用户需要通过车辆的造型及其他行驶信息判断无人车的行驶信息,同时无人车也需要告知用户无人车已经注意到行人,从而保证行人作为道路参与者的安全性;在交互阶段和决策阶段为信息的传递与行为决策阶段,用户需要通过接收无人车的信息进行行为决策,不清晰的信息会加重行人的不安全感和事故发生概率。

图3 访谈及问卷调查定量研究结果

表1 行人行为特征研究及需求分析
3 基于AAM模型的车外交互策略
3.1 基于AAM模型的车外交互策略模型构建
基于以上行人行为分析,可以将用户-无人车交互用户体验不好的原因归结为以下4个方面,并对此构建车外交互设计策略模型,如图4所示。

图4 基于AAM模型的车外交互策略模型
(1)信任。其是影响接受度的核心因素,也是无人驾驶汽车中影响用户使用的最大的因素[11],行人与无人车乃至无人车中坐着的乘客而言,其弱势群体的地位更强,更容易受到伤害,同时行人无法对每一辆无人车都做到熟悉,所以规范化车外交互的策略并让信息的传递更加清晰透明是构建人-车-路关系的核心。
(2)信息的可识别性。颜色是否能让行人在较远的距离识别尺寸:是否能让行人在较远的距离和较强的光照条件下看懂传递的中文信息;如果用符号化的语言,行人是否可以理解;信息滚动的速度是否符合行人的认知能力,是否有多模态的展示方式。
(3)协作。车在做什么,即无人车需要告诉用户其现在的状态,以便用户判断;车接下来即将做什么,即无人车需要告诉用户其下一步的行为,用户可以此判断无人车看到了自己并且确定自己的下一步行为;行人可以做什么,即对于在道路中有困惑的乘客,可以给予指引。
(4)路权与情感化。使人与车的关系更加和谐;调动喜爱、默契等情感;通过非纯文字的方式,多通道多模态的自然交互方式,让信息更加清晰;行驶在区域中的无人车,还可以通过车外屏方式成为城市的景观,带来便民服务。
3.2 拟人化设计提升信任与情感化
信任被定义为是“一个人对另一个人或群体的文字、承诺、口头或书面陈述的普遍期望”[12]。增强人的信任并使自动技术易于与人互动的一种可能性是实现车辆的拟人化特征和特性,可以提供自然互动的感觉。根据恐怖谷效应,随着拟人程度增加,人类对其接受度亦增加[13]。但随着外形程度愈加趋近真人程度的时候,思维和行为上的不相似会让人们对于这个系统产生巨大的恐惧感和抵触感,进而将好感度跌入谷底。然后随着行为和思想的逐件拟人化,好感又会以急剧的速度上升。所以在设计中,本文将拟人化分为4个不同的维度,分别为视觉的拟人化、语言的拟人化、动作的拟人化和心理的拟人化:
(1)视觉的拟人化。比如利用车大灯模拟车辆的眼睛,将车前舱周围的光条布置成类似动物的轮廓。其是拟人化设计最基础的层次。在视觉层面上,本文用表情屏的方式对小车进行拟人化表达。
(2)语言的拟人化。在与人进行交互时,本文的交互策略选取更加自然,比如通过不同的话术展示系统的“性格”,在语音交互方式中加入一些必要的语气词与停顿词,增加真实感,让语音的声音角色于系统角色匹配等等。
(3)动作的拟人化。在行为上按照人或动物的动作方式来设计和塑造自动化系统的运动轨迹,比如结合视觉拟人化,在与人进行交互过程中可以摆动“耳朵”表达情绪;车灯的设计可以利用光束的强弱、颜色、大小等模拟人类眼神的变化,进而表达情绪。
(4)心理的拟人化。其是拟人化设计中较高的层级,也是恐怖谷效应谷底之后的谷峰阶段。本文把系统想象成人类,对自动化系统进行建模,从而在心理层面上更加接近于人类的想法,将该角色下的系统该有什么样的行为、语气、外形、声音等进行综合的规划,再结合系统的自学习能力,使系统从内到外的达到拟人。
3.3 车外信息的分类与可视化
根据无人车与行人的交互关系,本文把无人车周围的区域划分为3个部分(图5):前方交互区、后方交互区和侧方交互区。其中前方交互区主要针对无人车和行人对向行驶或者交叉行驶的情况,以显示驾驶状态信息为主;后方交互区主要针对同向行驶的情况,除了显示驾驶状态信息,还提供表情交互比如打招呼、挥手再见,对行人等待表示感谢等情感表达;侧方交互区主要显示与驾驶信息无关的便民服务和娱乐功能。

图5 车外交互信息架构
3.4 车外交互的多模态设计
为了充分模拟人与人之间的交互方式,本文采用多模态交互方式将多种感官融合,通过文字、语音、视觉、动作、环境等多种方式进行人机交互[14]。主要针对视觉通道、听觉通道及触觉通道以及多通道综合进行设计,符合用户的习惯特点并满足用户期待(表2)。
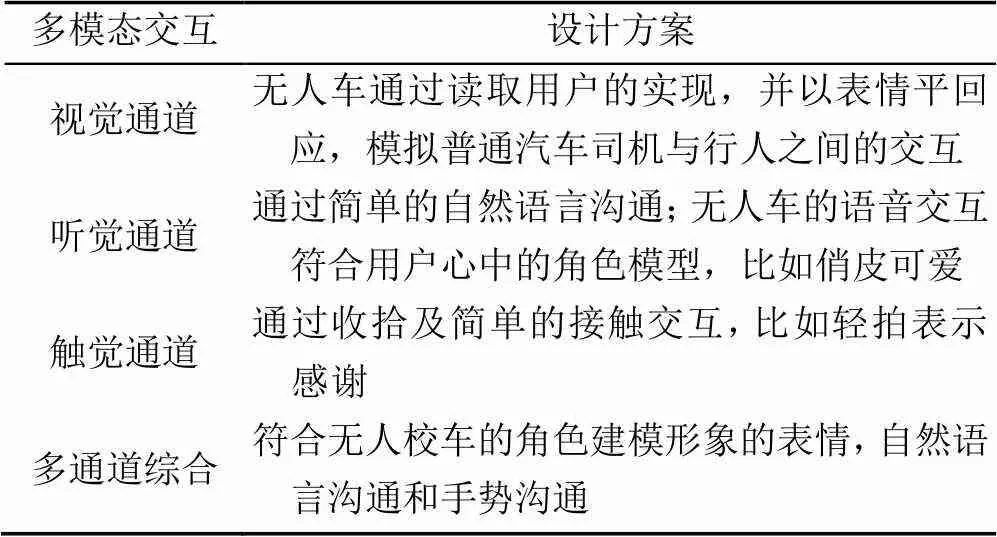
表2 车外交互的多模态设计
3.5 基于车外交互策略的交互原型设计
车身上的车外LED显示屏通过不同的表情表示车辆行驶状态,相较于文字的显示方式,图形的方式对于用户的认知负荷较小,不同年龄段的行人都可以理解,比如加速用的是兴奋表情,减速用的是喝咖啡的悠闲表情。另外,由于车外交互收物理环境的影响较大,比如光照条件,所以本文针对白天黑夜设计了2套方案,选取了在2种光照条件下对比度和清晰度最高的配色作为最终方案(图6)。

图6 车外交互高保真原型
4 设计测试评估
针对概念设计阶段进行用户参与的测试与评估可以帮助改善人机界面的设计。封闭及半封闭园区会成为无人驾驶汽车最先落地的场景,本文将测试场景设定在校园内,招募在校大学生进行车外屏人机交互可用性测试。共招募被试者6名,女性和男性各3名。测试评估从介绍实验背景、参与标准开始,确认同意声明后,将自动驾驶车辆介绍给参与者,自动驾驶车辆可以以25 km/h以下的速度行驶,尺寸为1.5 m×1.0 m×0.4 m,允许在所有道路类型上行驶。
在此次测试评估中,采用了用户测试法,收集真实的用户使用数据,包括感知有用性、感知易用性、接受度、信任度,用以衡量交互策略原型的可用性。评分采用李克特量表,0分为非常不同意,9分为非常同意。其中感知有用性的平均分为6.62,=0.93;感知易用性的平均分为7.14,=1.21;接受度的平均分为7.74,=0.56;信任度的平均分为6.92,=1.42。通过系统的可用性评估结果可以看出,被测用户对系统原型均较为满意,测试过程中没有遇到认知障碍,通过此交互系统原型,被测者可以流畅准确地理解无人车的意图,验证了此系统的可用性及较高的接受度的。
5 结论与展望
本文从无人车与行人的常见交互场景出发,对车外屏人机界面的设计需求进行研究。基于自动化接受度AAM模型提出了符合行人行为特征和认知的车外人机交互策略模型,从信任度和协作性的交互利用拟人化设计,车外信息分类与可视化及多模态交互的方式提高车外信息传递的效率和人们的接受度。并结合该车外人机交互策略,提出了车外交互设计方案与原型设计。在此基础上,对初步的原型设计进行了验证与测试评估,验证了基于该策略的设计确实提高了用户的接受度。本文的研究对未来车外人机交互设计有一定的启示作用。
[1] 谭浩, 赵丹华, 赵江洪. 面向复杂交互情境的汽车人机界面设计研究[J]. 包装工程, 2012(18): 26-30. TAN H, ZHAO D H, ZHAO J H, Research on automotive human machine interface design based on complex interaction context[J]. Packaging Engineering, 2012(18): 26-30 (in Chinese).
[2] 王文娟, 张碧含, 符梦婷, 等. 无人物流车的车外屏人机界面设计研究[J]. 图学学报, 2020, 41(3): 335-341. WANG W J, ZHANG B H, FU M T, et al. Research on human-machine interface design of exterior screen of driverless delivery car[J]. Journal of Graphics. 2020, 41(3): 335-341 (in Chinese).
[3] MOORE D, CURRANO R, STRACK G E, et al. The case for implicit external human-machine interfaces for autonomous vehicles[C]//Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications. New York: Association for Computing Machinery, 2019: 295-307.
[4] STANCIU S C, EBY D W, MOLNAR L J, et al. Pedestrians/bicyclists and autonomous vehicles: how will they communicate?[J]. Transportation Research Record, 2018, 2672(22): 58-66.
[5] VENKATESH V, MORRIS M G, DAVIS G B, et al. User acceptance of information technology: toward a unified view[J]. MIS Quarterly, 2003, 27(3): 425-478.
[6] 边鹏. 技术接受模型研究综述[J]. 图书馆学研究, 2012(1): 2-6. BIAN P, Review of research on technology acceptance model[J]. Resaerch on Library Science, 2012(1): 2-6 (in Chinese).
[7] 鲁耀斌, 徐红梅. 技术接受模型及其相关理论的比较研究[J]. 科技进步与对策, 2005, 22(10): 176-178. LU Y B, XU H M, A comparison study of TAM and its theory basis[J]. Science & Technology Progress and Policy, 2012, 22(10): 176-178 (in Chinese).
[8] GHAZIZADEH M, LEE J D. Extending the technology acceptance model to assess automation[J]. Cognition, Technology & Work, 2012, 14: 39-49.
[9] MUIR B M. Trust in automation: part I. theoretical issues in the study of trust and human intervention in automated systems[J]. Ergonomics, 1994, 37(11): 1905-1922.
[10] PARASURAMAN R, RILEY V. Humans and automation: use, misuse, disuse, abuse[J]. Human Factors, 1997, 39(2): 230-253.
[11] MUIR B M, MORAY N. Trust in automation: part II. experimental studies of trust and human intervention in a process control simulation[J]. Ergonomics, 1996, 39(3): 429-460.
[12] KRAUS J M, NOTHDURFT F, HOCK P, et al. Human after all: effects of mere presence and social interaction of a humanoid robot as a co-driver in automated driving[C]//Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications. New York: ACM Press, 2016: 129-134.
[13] 钟翔伟, 王军锋, 留沧海. 基于情感模糊计算的恐怖谷效应起因分析[J]. 包装工程, 2018, 39(14): 190-196. ZHONG X W, WANG J F, LIU C H, An analysis of the causes of uncanny valley effect based on emotional fuzzy computation[J]. Packaging Engineering, 2018, 39(14): 190-196 (in Chinese).
[14] 张超, 赵江洪. 汽车导航多通道交互设计[J]. 包装工程, 2015, 36(22): 67-70. ZHANG C, ZHAO J H. Mulitimodal interaction design of automobile navigation[J]. Packaging Engineering, 2015, 36(22): 67-70 (in Chinese).
Research on external vehicle interaction design based on AAM model
ZHANG Bi-han, YOU Fang
(College of Arts and Media, Tongji University, Shanghai 201804, China)
With the continuous advancement of science and technology, new technologies have been constantly ushered into people’s lives, and the autonomous driving technology has also been developing rapidly. However, the technological development alone cannot increase people’s acceptance.In order to improve the acceptance of unmanned driving technology, the automation acceptance model was studied. Explorations were conducted on how to combine the acceptance model with interaction design, and analyses were made regarding the user experience of external vehicle interaction based on the acceptance model. Through the analysis of the use scenarios of external vehicle interaction in semi-closed scenes and the user journey map during pedestrians’ interaction with automation vehicles, a pedestrian behavior characteristic model was summarized. In addition, on the basis of related research on the automation acceptance model, the effectiveness and acceptance of external vehicle interaction were improved from the perspective of trust and compatibility. Based on the AAM model, a strategy fitting the pedestrian behavior characteristics and cognition was proposed for human-machine external vehicle interaction, thereby enhancing communication efficiency and acceptance.
automation acceptance model; external vehicle interaction; human-machine interface; design strategy
TP 751.1
10.11996/JG.j.2095-302X.2020061012
A
2095-302X(2020)06-1012-06
2020-07-01;
2020-08-10
1 July,2020;
10 August,2020
上海汽车工业科技发展基金(1717);国家社科基金项目(19FYSB040)
Shanghai Automotive Industry Technology Development Fund (1717);National Social Science Fund Project (19FYSB040)
张碧含(1994-),女,上海人,硕士研究生。主要研究方向为汽车交互设计、用户行为分析、用户体验。 E-mail:zbhqq940621@163.com
ZHANG Bi-han (1994-), female, master student. Her main research interests cover car interaction design, user behavior analysis, user experience. E-mail:zbhqq940621@163.com
由 芳(1974-),女,上海人,教授,博士。主要研究领域为交互设计、智能汽车HMI设计和评估、智能媒体与传播。 E-mail:youfang.k@qq.com
YOU Fang (1974-), female, professor, Ph.D. Her main research interests cover interaction design, smart car HMI design and evaluation, smart media and communication. E-mail:youfang.k@qq.com
猜你喜欢
意林(2021年5期)2021-04-18
军民两用技术与产品(2021年2期)2021-04-13
作文周刊·小学一年级版(2021年48期)2021-01-04
扬子江(2019年1期)2019-03-08
小哥白尼·趣味科学画报(2019年12期)2019-02-28
北方经贸(2018年12期)2018-12-06
小天使·一年级语数英综合(2017年6期)2017-06-07
岷峨诗稿(2017年4期)2017-04-20
作文大王·低年级(2017年4期)2017-04-10
汽车与安全(2016年5期)2016-12-01