
基于ROBCAD工业机器人工作空间的仿真与分析
2021-01-13 12:17董诗绘
装备制造技术 2020年10期
董诗绘
(唐山工业职业技术学院,河北 唐山063000)
0 引言
工业机器人的工作空间指机器人不同关节运动达到的末端执行器的所有位置的集合,也叫可达工作空间。在对机器人进行路径规划和控制之前,必须要分析其工作空间,工作空间表示工业机器人的活动范围,这是评价工业机器人工作能力的重要因素[1],也是对工业机器人进行控制的基础。本文以工业机器人在车身后围板焊接线的应用为研究对象,使用ROBCAD软件对工业机器人的工作空间进行仿真,方便现场工程技术人员分析,判断机器人在工作空间内作业的可行性进而减少实际运行过程中的意外事故。
1 工业机器人工作空间的描述
本文使用的工业机器人是ABB IRB6640型工业机器人,如图1所示[2]。

图1 ABB IRB6640型工业机器人
本文采用两台ABB IRB6640型机器人焊接同一个后围板,在机器人仿真时需要对两个机器人进行工作空间的仿真,检查待完成的工作任务的目标物体是否在机器人的工作空间范围内[3]。图1中两台机器人分别命名为RobotA和RobotB。
工业机器人末端执行器的所有位置的集合构成了机器人的工作空间。因此需要求出工业机器人的末端执行器的所有位置的坐标[4]。本文采用Denavit-Hartenberg方法(简称D-H方法),已知各个关节变量的值,如表1所示,从基座固定坐标系开始依次通过各连杆坐标系的传递,推导求出机器人末端手部坐标系的位姿。ABB IRB6640型机器人的连杆坐标系如图2所示。

表1 ABB IRB6640型机器人的连杆参数

图2 ABB IRB6640连杆坐标系
Ai变换矩阵,表示的是一个连杆坐标系与下一个连杆坐标系间相对关系的齐次变换矩阵。

将表1机器人各个参数带入式(1)中,得到各个连杆的齐次变换矩阵为:

ABB IRB6640型机器人的运动学方程为:

上式中,前3列坐标表示机s器人的位置,第4列表示的是末端手部的位置,所以求得手部的位置坐标:


机器人的工作空间用Q表示为:
2 工业机器人工作空间仿真
2.1 ROBCAD软件介绍
ROBCAD软件现为西门子公司Siemens PLM Software管理软件的一部分[5]。该软件可选机器人型号和焊枪类型、导入创建焊点、工作空间仿真、干涉分析、平衡生产节拍和离线编程等。该软件建模速度快、机器人仿真十分精确而被许多企业大力推行,在许多著名汽车生产制造商中采用ROBCAD软件进行工业机器人的自动化生产线设计和仿真等工作。
2.2 工作空间仿真
采用MATLAB对机器人工作空间进行仿真,求解其工作空间[2],仿真结果如图3所示。虽然可以得到整个工作空间的三维图,但是仿真过程计算量大,过程慢,仿真结果不直观。通过使用MATLAB软件和ROBCAD软件进行工业机器人工作空间仿真结果比较,利用ROBCAD软件仿真的工作空间求解速度更快、边缘轮廓更完整、图像更清晰、更直观,更加适用于工业机器人实际应用,如图4所示。

图3 基于MATLAB工作空间的仿真

图4 基于ROBCAD软件工作空间的仿真
3 工作空间仿真分析
对于一个成品的机器人来说,面对一个待完成的操作任务,前提是目标物体在机器人的工作空间范围内,即考虑机器人工作空间能否包含其任务空间。在满足的情况下,才能对其进行相关操作,考虑如何完成任务;对于不在机器人工作空间范围的目标物体,就要使该物体到达机器人的工作空间范围之内,否则将不能完成对目标物体的具体操作。
通过对两个机器人工作空间的仿真(图5),目标物体后围板在RobotA的工作空间范围内(图5(a)中,轮廓为RobotA的工作空间),也在robot2的工作空间范围内(图5(b)中,轮廓为RobotB的工作空间)。即两个机器人工作空间都能包含其任务空间,可以对目标物体进行相关操作。

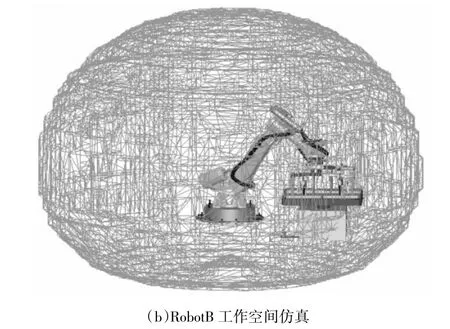
图5 ABB IRB6640型工业机器人工作空间仿真
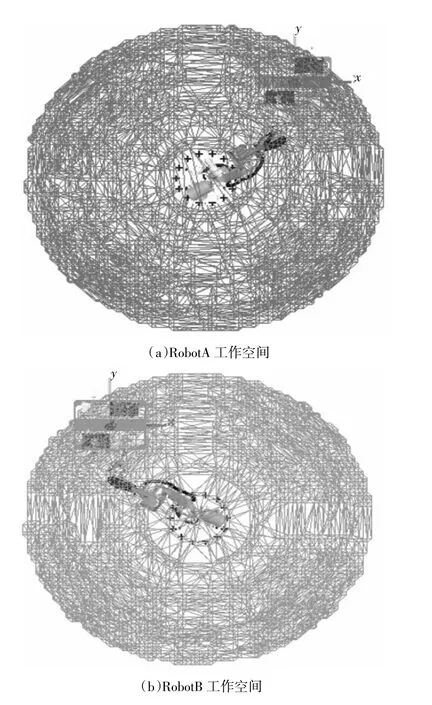
图6 机器人工作空间在XOY平面投影
图7和图8是在同一空间内RobotA和RobotB工作空间的仿真及其在XOY平面投影[5]。通过对两个机器人在同一工作空间的仿真,板件都在两个机器人工作空间范围内,即工作空间包含任务空间,满足机器人工作条件。

图7 在同一空间内RobotA和RobotB工作空间的仿真
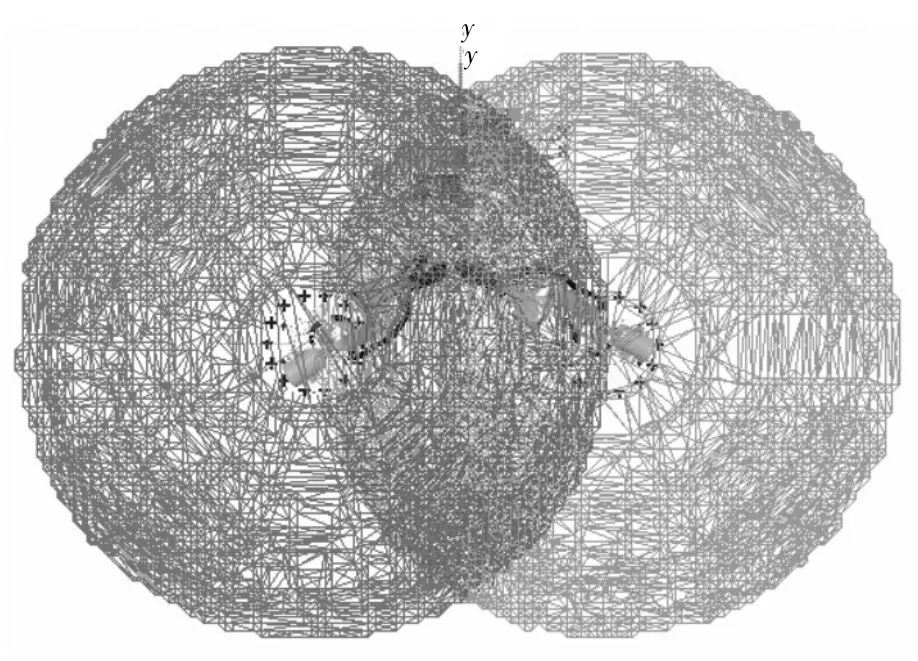
图8 在同一空间内双机器人工作空间的XOY平面投影
4 结语
本研究采用ROBCAD软件对工业机器人焊接车身后围板工作空间的仿真,机器人的工作空间求解速度快、边缘轮廓更完整、图像更清晰、更直观,对机器人工作空间与任务空间进行分析得出机器人工作空间包含两个机器人焊接的任务空间,机器人、后围板及其工装设备符合实际生产线布局要求,为机器人焊接轨迹规划和控制提供了有利参考依据,保障生产线安全生产,对实际生产线可以正常投产起到了很大作用。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
导航定位学报(2022年2期)2022-04-11
中学生数理化·高一版(2020年1期)2020-02-20
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
汽车实用技术(2017年16期)2017-09-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
少儿科学周刊·儿童版(2015年2期)2015-07-07
科普童话·百科探秘(2015年4期)2015-05-14
智慧与创想(2013年3期)2013-05-09
