
智能变电站巡检机器人终端视觉巡检技术研究
2021-01-20 06:20
探索科学(学术版) 2020年5期
广东电网有限责任公司湛江供电局 广东 湛江 524000
0 引言
在智能变电站日常的巡检和验收中,信号核对是一项重要的工作,需要一组人在设备现场点接信号,另一组在装置或后台观察信号是否正确上报,所需人数较多,工作任务重时,容易出现人手不足的情况,这时便只能采用2人先到现场点接后再到主控室核对的方法,效率低下,停电时间也因此延长,由于核对时间不同步,信号可靠性也得不到保证[1]。为解决该问题,对智能变电站巡检机器人终端视觉巡检技术进行了研究。
1 巡检机器人终端视觉巡检技术研究
为确保信号核对的可靠性,机器人传输给现场人员的画面应足够清晰,能对信号进行准确甄别。信号提取是人机交互的重要部分,是现场工作人员远程获取后台或保护测控画面的功能实现者[2]。为了实现信号核对的实时性,便于安装与减轻负载,对摄像头的动态控制也更易于实现,使现场人员在移动终端即可实时看到监控画面,选取微型摄像头作为巡检机器人视觉终端的信号提取装置。
巡检机器人需要在主控室内进行移动,其主体位于地上,而对后台机及保护测控装置进行观察时,需要摄像头进行一定的角度移动,主要分为巡检机器人摄像头的固定技术以及摄像头移动技术两部分,分别由支撑杆和舵机实现。由于微型摄像头重量较小,对扭矩要求不高,出于平衡性及高度调节范围的考虑,选择能够扭转180°到360°的双轴运转RDS3115MG型舵机。
开展信号核对工作时,巡检机器人需要在不同间隔屏柜以及后台机之间移动,因此巡检机器人的移动技术也是整个视觉巡检技术中极为重要的一部分。考虑到主控室屏柜较多,通道空间狭窄,机器人在主控室内移动需要足够的灵活性。在研究巡检机器人移动技术时要着重考虑机器人的移动多向性、转弯半径等。通过改变麦克纳姆轮的轮子的转向可实现底盘在原地直接向各方向移动,同时具备原地360度旋转功能。
2 实验设计
保证实验结果的准确性,共进行三组测试,测试结束后综合考虑实验结果并作出相应的分析。实验组使用巡检机器人进行检验,首先将巡检机器人放置主控室内,打开巡检机器人的电源和摄像头,并开启远程监控软件,调试人员在主控室进一步核对信号变化与现场调试人员观察的信号变化一致,调试结束后将巡检机器人远程操控至其指定安置位置。
2.1 实验结果分析 将实验组与对照组的检验报告汇总分析,得到如下表所示的实验结果。
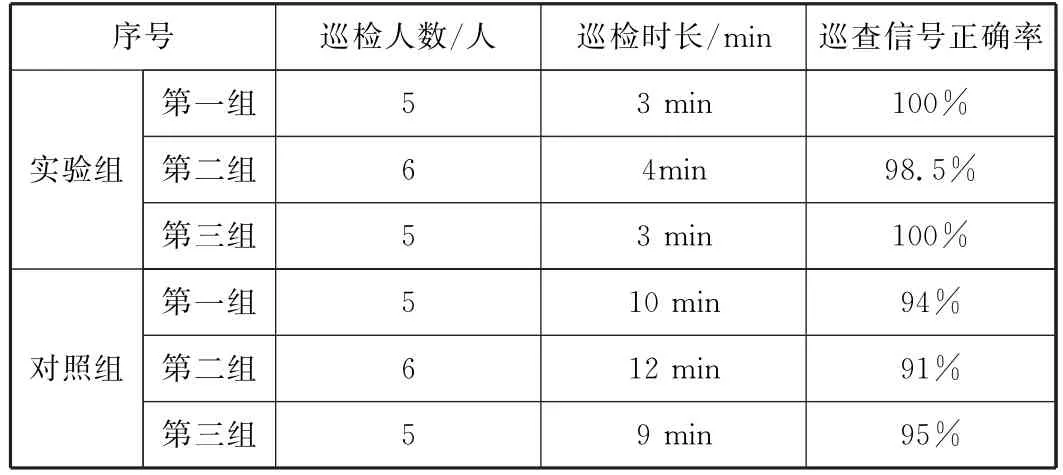
表1 实验结果
通过巡检人数、巡检时长和巡检信号正确率计算巡检效率,计算公式如下所示:

其中,φ表示巡查效率,m表示巡查信号正确率,n表示巡查人数,h1表示标准巡查时长,为5min,h2表示巡查实际时长。通过巡查效率计算公式,可以求出实验中实验组合对照组的巡查效率,如表2所示。

表2 巡查效率
通过上表可以得到,使用实验组在巡查效率上远高于对照组。因此,设计的智能变电站巡查机器人终端视觉巡查技术具备实用性。
3 结束语
机器人进行辅助巡检,既可以精简工作人员,节省人力成本,也可以提高了巡检效率,缩短了每次巡检时长,进一步减少了停电时间,每年可以带来可观的经济及社会效益。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
现代装饰(2020年8期)2020-08-24
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年23期)2018-12-26
销售与市场·渠道版(2017年2期)2017-03-09
汽车维修与保养(2015年8期)2015-04-17
源流(2014年4期)2014-04-21
网络与信息(2009年8期)2009-05-10
