基于智能手机/MEMS惯性传感器的隧道病害定位研究
2021-01-20 07:54贺志勇钟诚杨永红凌艳城
广西大学学报(自然科学版) 2020年5期
贺志勇,钟诚,杨永红,凌艳城
(华南理工大学 土木与交通学院, 广东 广州 510640)
0 前言
随着我国基础建设的发展,隧道数量不断增长,隧道成为道路建设中的重要组成部分。隧道病害的检测和定位是隧道养护中的重要部分,传统病害的检测和定位一般采用特征描述、纸质记录等方式,在实际定位病害的过程中存在效率低、易出错等特点。因此,利用合适的方法提高病害检测和定位效率具有重要的工程价值。基于全球卫星系统(GPS)实现定位的技术已经取得了成熟的研究和运用[1-2],然而由于卫星信号容易被建筑物所遮挡,基于GPS的室内技术远不能达到工程要求。随着学者对于室内定位技术的深入研究[3-10],基于室内导航技术的运用领域也在不断扩展。朱新宇等[11]提出将室内定位技术运用于消防救援;杨顺等[12]将WIFI室内定位技术运用于健身场所等;这些室内定位的运用对于提高病害检测和定位效率具有重要的参考意义。
为了提高检测人员在隧道中定位病害的效率,节约检测的时间成本,本文主要将基于惯性传感器的室内定位技术引入到隧道病害定位中。首先,在原有的算法基础上充分考虑检测人员在隧道中检测时的步行规律,对算法进一步优化,提高了步态检测的准确性;其次,依照传统的隧道检测描述方式,总结了一种适合于电子地图的病害表示方法;最后,通过无线蓝牙技术将MPU6050模块采集的数据实时发送到智能手机中,同时将手机GPS获得的位置作为惯性导航初始的参考位置,依照实际的位置特征进一步调整,确定精确的初始位置,在行走过程中,利用优化后的算法对MPU6050模块采集的数据进行判断,实现电子地图中实时更新行人在隧道中的位置信息,并将电子地图中标识的病害位置,作为导航的目的地,最终实现了在隧道中快速寻找到病害位置的功能。
1 智能手机定位误差
影响智能手机定位精度的因素很多,主要包括定位系统自身的性能、自然环境的影响、设备内部因素等。目前,智能手机的定位基本融合基站、GPS、北斗等进行混合定位。随着双频GPS等技术在智能手机中的普及,定位精度将进一步提高。为了实测普通手机在干道和隧道中的定位精度,本文以广州市某主干道为试验地点,利用一加手机分别获得在主干道和主干道(含下穿隧道)的实际轨迹和定位轨迹,其中定位轨迹点以1Hz的频率采集。
图1中的数据主要是在主干道中测试获得,将主干道获得的数据从右往左分为4个阶段:第1阶段,定位坐标和实际坐标出现巨大误差,定位坐标出现“漂移”现象;第2阶段,定位坐标和实际坐标基本吻合;第3阶段,定位坐标失去连续性,并出现轻微“漂移”;第4阶段,定位坐标逐渐靠近实际坐标并趋于平稳。其中第1阶段为手机刚打开定位,第3阶段为手机关闭定位后打开。结合分析采集坐标的时间可知,在主干道中,智能手机在定位的30 s后,能保持数据稳定,并且控制误差在较小的范围内。
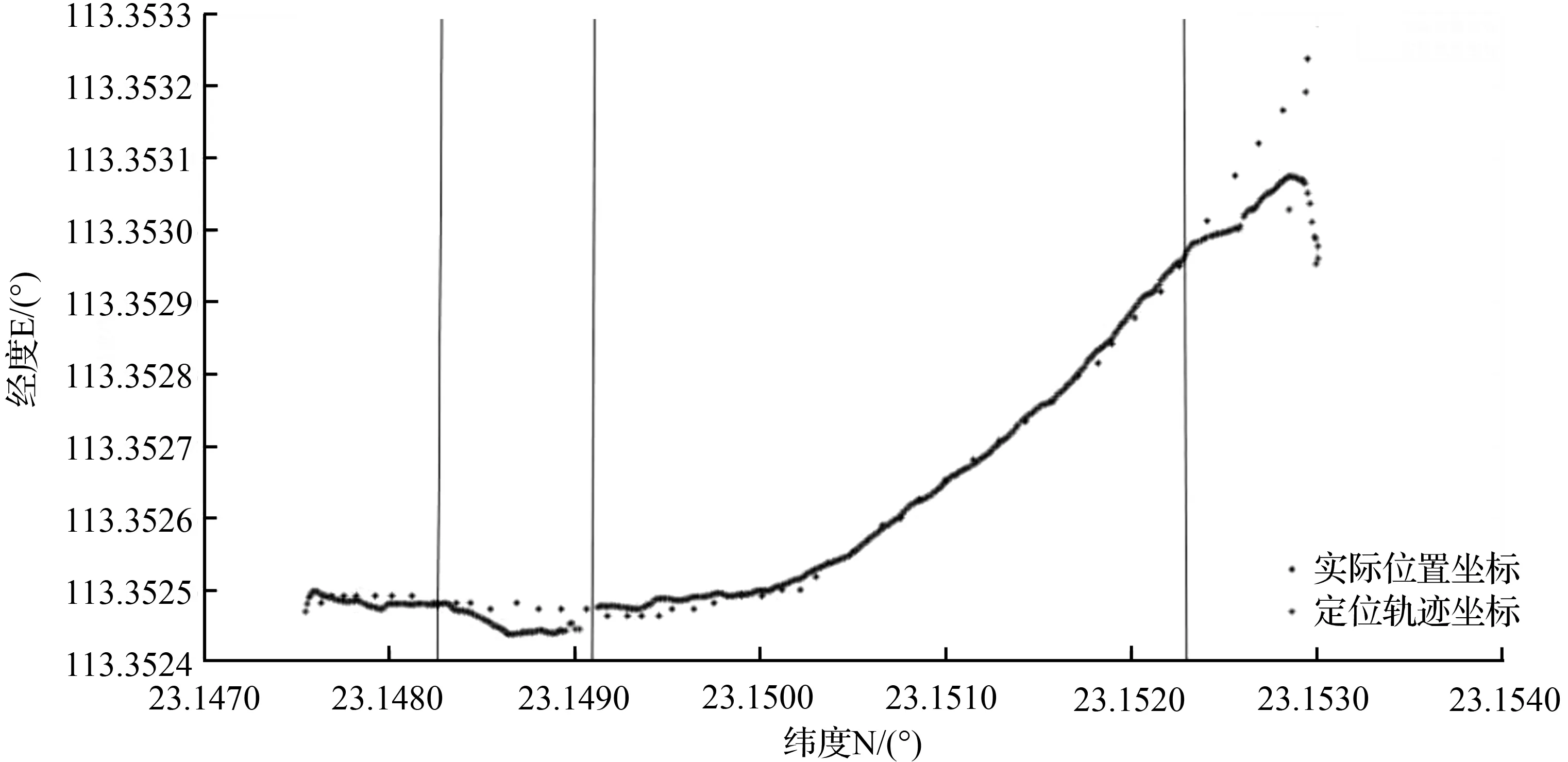
图1 广州市某主干道1至2段GPS定位坐标Fig.1 GPS location coordinates of section 1 to 2 of a main road in Guangzhou
图2中的数据主要是在主干道(含下穿隧道)中测试获得,同样比较图2的实际坐标和定位坐标,我们可以将获得的数据从右至左分为3个阶段:第1阶段定位坐标和实际坐标基本吻合;第2阶段定位坐标出现“漂移”甚至消失;第3阶段,定位坐标和实际坐标重新吻合。其中,通过分析采集坐标点的时间,可知第2阶段刚好对应隧道内部。因此,从图可知在下穿隧道中,智能手机定位功能出现位置严重“漂移”,基本不能满足定位要求。
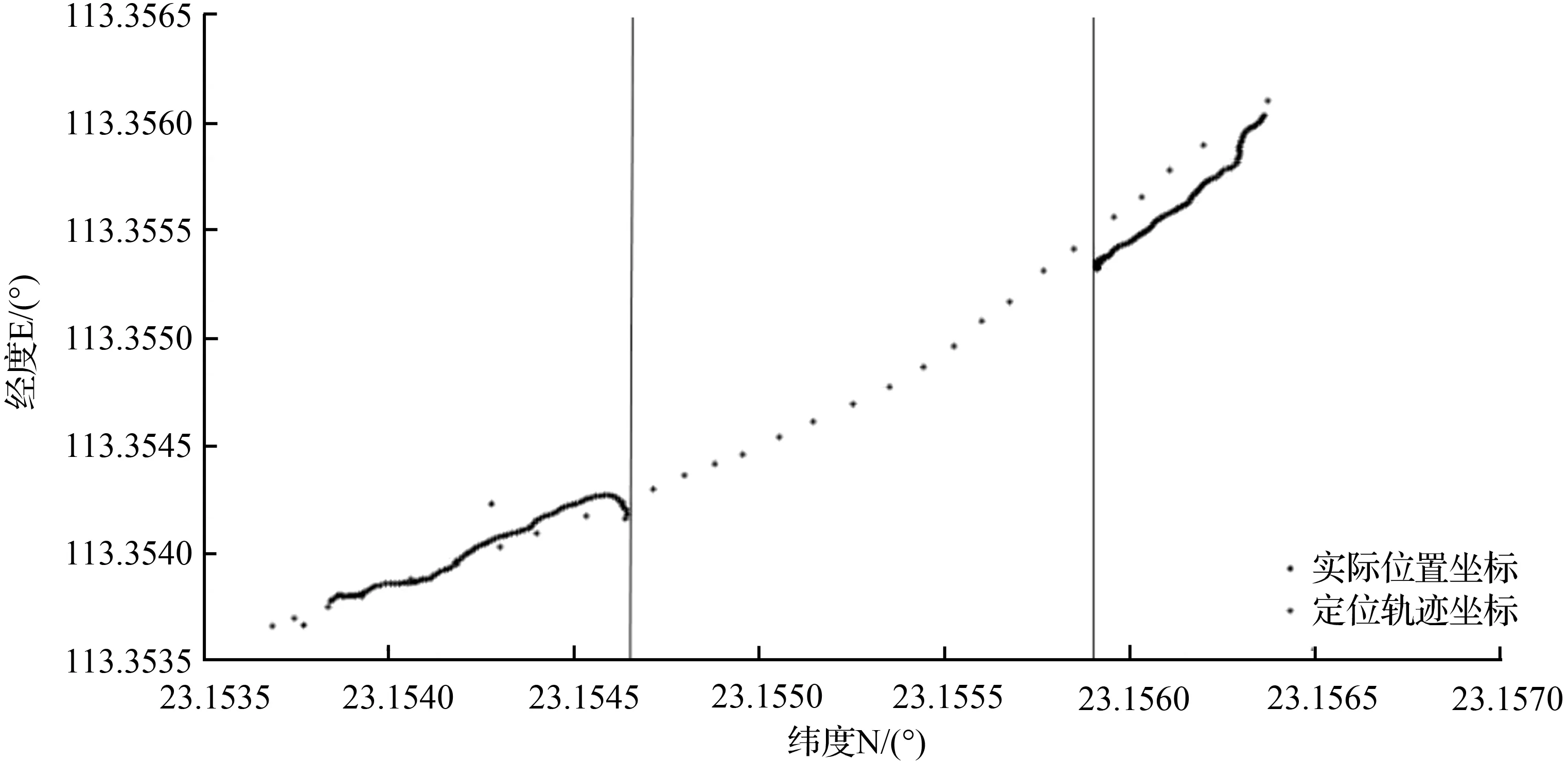
图2 广州市某主干道3至4段GPS定位坐标Fig.2 GPS location coordinates of section 3 to 4 of a main road in Guangzhou
2 惯性导航系统在隧道中定位研究
由于卫星信号在隧道中不能保持正常强度,因此,智能手机在隧道中的定位远不能达到洞外的精度,甚至出现“漂移”现象。为了满足洞内定位的需求,本文将惯性导航系统运用到隧道定位中。惯性导航系统是由惯性传感器、航位推算算法(pedestrian dead reckoning)组成,由于在初始位置和方向已知的情况下,它能独立地推测物体的位置和姿态,因此被广泛地运用于导航定位中。目前,主流的智能手机都含有惯性传感器,如加速度计、陀螺仪、磁力计等,它们均可作为独立的系统。考虑在实际的检测中,用户需要将手机平放在手中查看病害和定位,为了使定位更加准确,本文将MPU6050模块和智能手机相结合,利用蓝牙将MPU6050模块采集的数据传到手机中,通过惯性导航算法解算出行人的姿态,并将位置信息实时显示到手机中。
惯性导航算法[13]的主要原理是通过获得行人的路程和方向信息,在短时间内不断地计算行人的相对位置信息。传统的惯性导航算法在计算位移时,一般按行人移动方向的加速度的二次积分获得。这种方法在短时间内可以获得行人的位移信息,但是存在误差随时间累积的缺点,其经纬度误差均以指数方式增长,其精度远远不能达到病害定位的要求。传统的惯性导航算法存在误差累积的主要原因是速度误差,行人停止运动时,由于前期的速度误差累积使得其速度还维持在一个比较高的水平。为了改善这一问题,本文引入行人航位推算算法。
航位推算算法[14-15]主要原理是通过步数和步长计算行人的位移,其关键步骤包括步态检测、步长估算和航向估计。
2.1 步态估算
步态检测主要是依据人在行走时,腿部有明显的上升和下降的过程,并且在稳定的状态下,每个人的行走都可看作是一个周期性的动作,因此,绑在腿上的模块获得的加速度也具有一定的规律。从模块获得的加速度数据如图3所示。
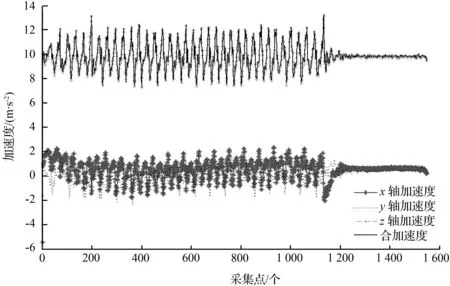
图3 行走过程中MPU6050模块的三向加速度及合加速度变化图Fig.3 Three-direction acceleration and combined acceleration variation diagram of MPU6050 module during walking
以ax、ay、az、at分别表示MPU6050模块的x、y、z方向的加速度和它们的合加速,则有:
(1)
从图3中,我们可以看出,az,at具有较明显的峰值和周期性变化。传统的峰值检测法一般依据设定的阈值和峰值的时间间隔来排除伪峰值。即:
amaxt={at|at>at-1&&at>=at+1},
(2)
amaxt>φ1,
(3)
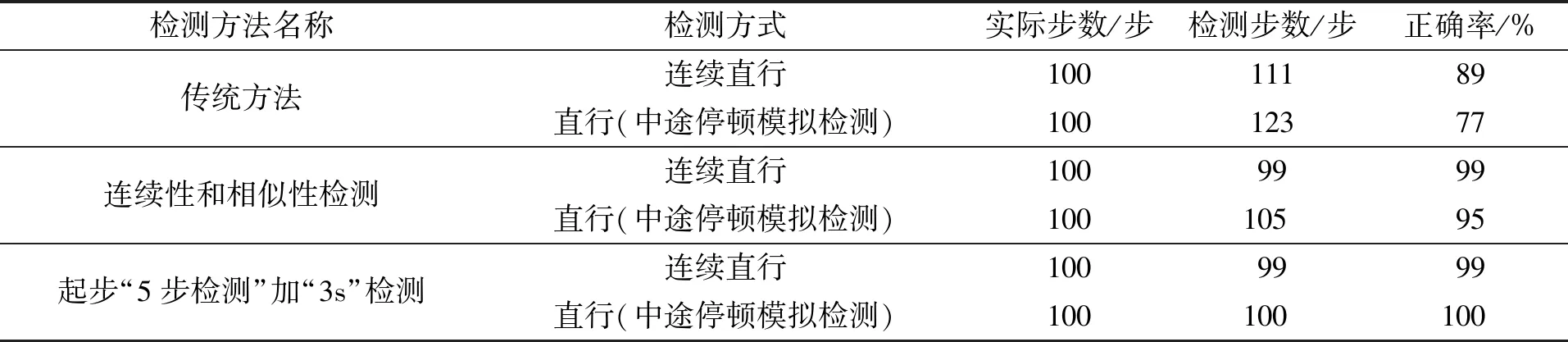
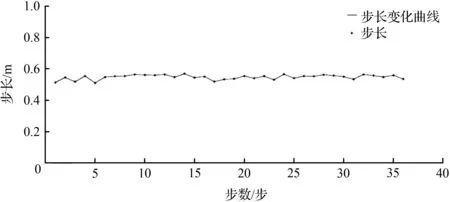
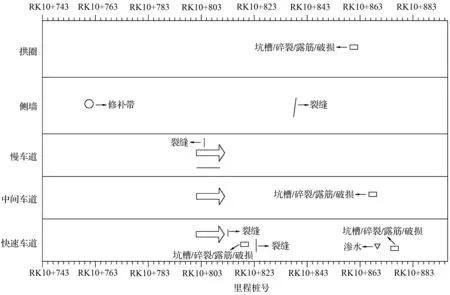
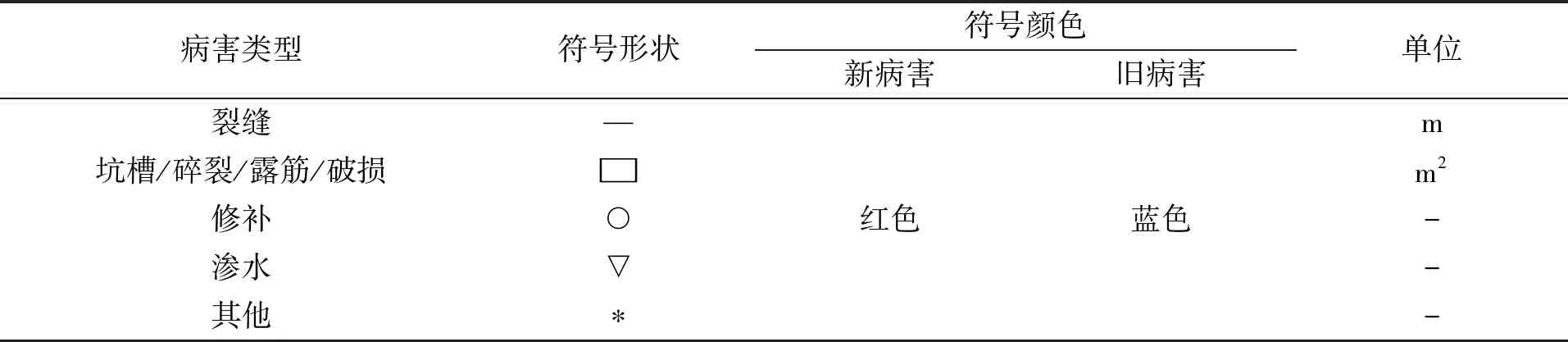
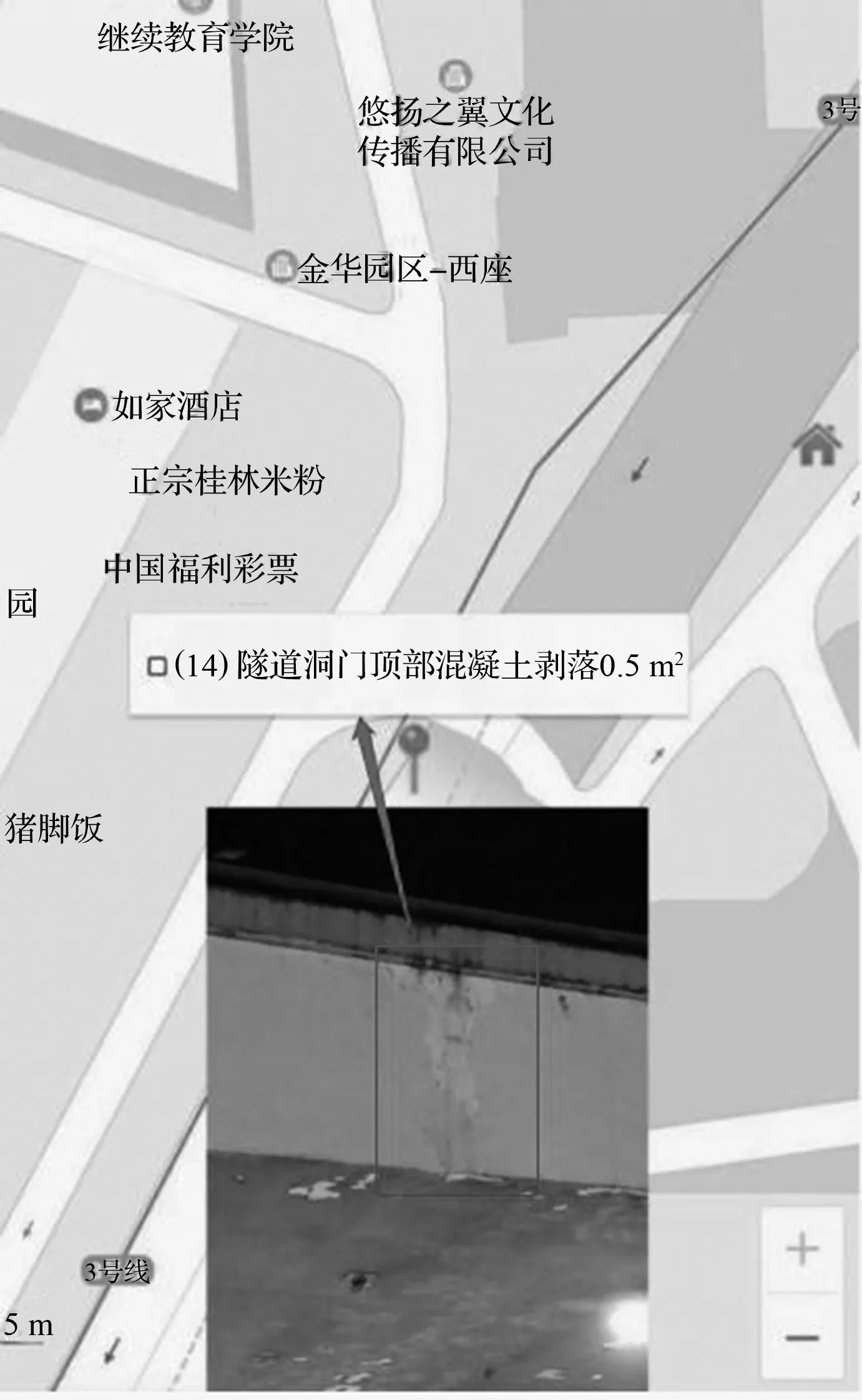
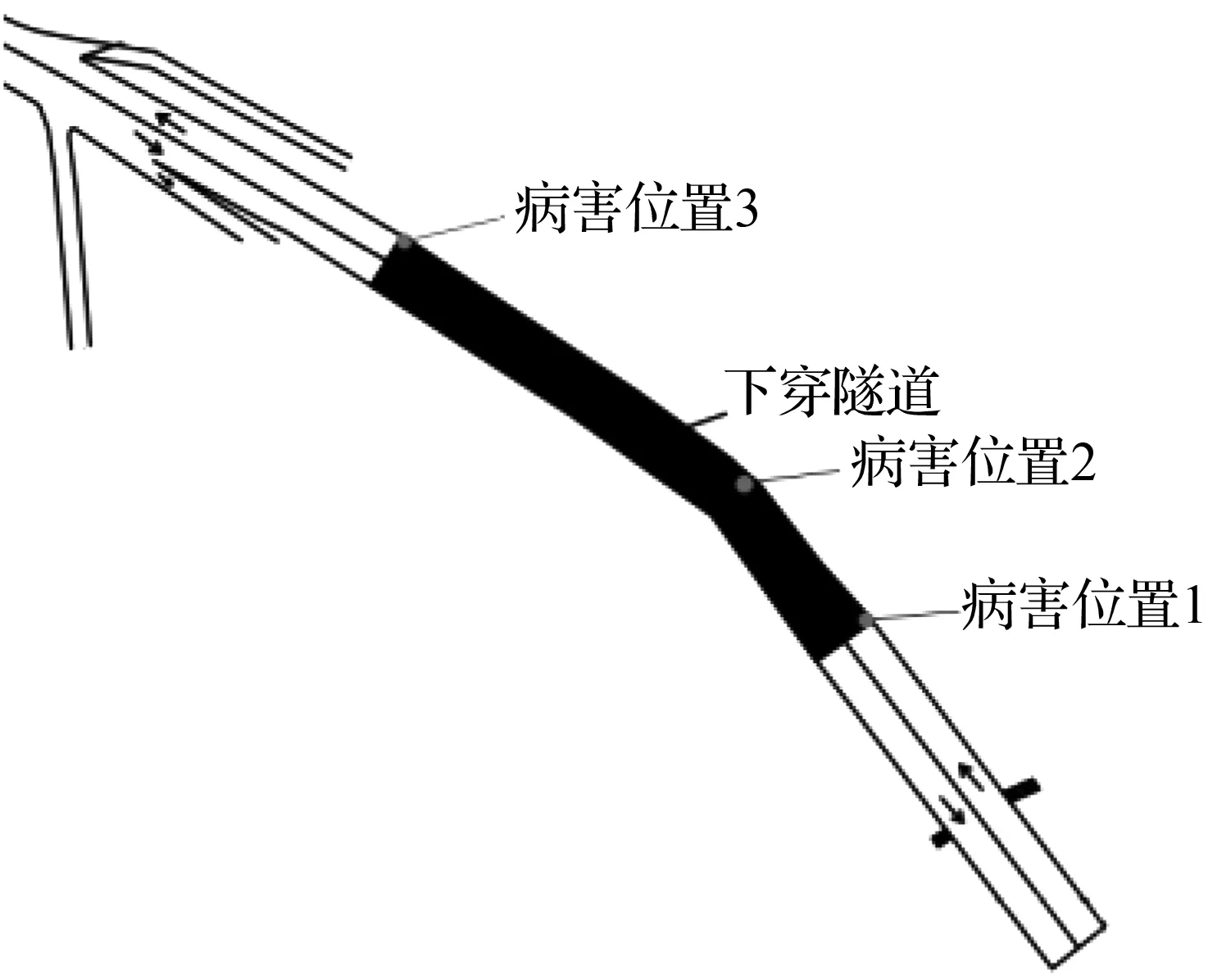
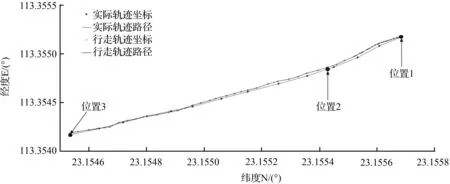
φ2 (4) 式中:amaxt为t时刻的加速度最大值,单位为m/s2;φ1为设定的加速度峰值阈值,单位为m/s2;φ2、φ3为设定的时间阈值,单位为s;Tmaxi、Tmaxi-1为当前时刻和上一时刻最大加速度对应的时间,单位为s。 式中当且仅当峰值大于设定的阈值、当前时刻的峰值和上一峰值之间的时间之差满足在设定阈值范围内时,检测的峰值为有效峰值,否则为伪峰值。 研究表明人行走的步频大约为1.3~2.8 Hz,因此当时间间隔阈值分别取0.3 s和1 s时,能够很好地排除非正常行走的情况。传统的峰值检测法由于加速度阈值是按固定值设计,因此,当峰值阈值太大时,容易丢失峰值,而当峰值阈值太小时,不易排除伪峰值。在隧道中检测时获得的合加速度经移动平均滤波后如图4所示。 图4 移动平均滤波后的合加速度Fig.4 Combined acceleration after moving average filtering 相比于建筑复杂的内部结构,隧道一般是朝着某个单一的方向,并且隧道一般保持较小的纵向坡度,检测人员在实际的检测过程中,一般沿着隧道的非机动车道或者人行道行走,行走路径基本为直线,因此,其行走过程中加速度峰值一般能保持区间内的连续性,相比于室内定位,不需要考虑“爬楼梯”、“复杂的转向”等运动状态。但是,检测过程中,检测人员需要在行走过程中不断地观察病害、记录数据,可知在实际检测时,除了正常的行走外,还存在原地检测病害、记录病害时的“踱步”、“假走”等状态。如上图4所示,部分“假走”状态下,合加速度仍然存在明显的峰值,当阈值取较大时,如取阈值0.6 m/s2,此时基本能排除“假走”状态下的峰值,但是部分正常行走状态下的峰值也会被排除;当阈值取较小时,如取阈值0.2 m/s2,此时能保证所有正常行走的峰值不被排除,但是部分“假走”状态下的峰值仍被保留,因此,为了保证不误排除真峰值,同时有效去除伪峰值,相比于传统的算法,我们将峰值阈值数值适当取小,并引入连续性和相似性检验,进一步去除非正常行走状态下的峰值。即: |amaxi-amaxi-2|<φ4, (5) sum(var(acc(i-N+1:i+1))<φ5)>M, (6) 式中:amaxi和amaxi-2分别表示当前的加速度峰值和前间隔加速度峰值,单位为m/s2;φ4为相似性判断阈值,单位为m/s2;φ5为连续性判断阈值,单位为m/s2;M为连续性判断参数。 式(5)表示相似性检验,即在正常行走时,一般会保持相同的运动状态,连续的左腿和右腿峰值一般具有同步性,但在检测或停顿等“假走”状态时,不具有这种状态,因此检验它们的相对差是否小于相似性判断阈值φ4能够排除部分“假走”的状态。式(6)表示连续性检验,在正常的行走过程中,我们一般会保持步态的连续,当我们在检测或者是停顿时,步态一般是无规则变化的,因此,连续取N+1个窗口的加速度值,当满足大于M个窗口的加速度方差均小于φ5时,我们判定行人处于行走状态。 当检测的数据从静止状态转变为运动状态时,有时检测人员并没有开始行走,只是由于“转向”等动作导致了数据的变化。由于此时的数据相对独立,实际的峰值判断中一般采用动态阈值的方法,因此,此时的数据可能能满足连续性和相似性检测。为了提高检测的准确性,本文进一步引入起步“5步检测”加“3 s检测”方法。当手机从静止状态开始计步时,只有当手机检测到行走连续超过5步,并且相邻步点的时间不超过3 s时,才开始计数,否则清空前面的计数。由于检测人员在实际检测中,经常在原地转动、观察和记录病害,产生的数据容易导致系统“误算”,因此加入起步“5步检测”加“3 s检测”方法,有利于减少计步误差。表1为传统步态检测方法、加入连续性和相似性检测步态检测方法以及加入起步“5步检测”加“3 s检测”检测方法的正确率对比。从表中可知,优化后的检测方法进一步提高了步态检测算法在实际检测中的鲁棒性。 表1 三种检测方法对比Tab.1 Comparison of three detection methods 步长估算模型包括常量模型、线性模型、非线性模型和机器学习模型。传统的常量模型和线性模型由于个体差异性,不能稳定地预测行人的步长。基于机器学习模型预测步长是近几年的热点方向,该方法具有较高的精度、良好的预测效果。但是该方法需要足够的数据来训练模型,因此复杂度较高。综合考虑,本文主要采用非线性模型Weinberg方法[16],即: (7) 式中:Lk为步长,K为常数,可根据实际步长进行修正;amax和amin分别表示单步中的最大加速度和最小加速度值,单位为m/s2。 非线性模型认为步长的差异性和腿长、加速度有关,因此每一步都是随加速度变化的值。如图5为通过Weinberg方法预测的行人步长变化曲线,可知预测模型具有良好的效果。 图5 Weinberg方法预测步长变化图Fig.5 Weinberg method predicts step size variation diagrams 传统的航向推算通过加速度传感器和磁力计共同获得,该方法在正常情况下具有较高的精度,但是易受磁场的干扰,在磁场影响下容易发生剧烈偏移,当远离磁场后又可以恢复正常。利用陀螺仪返回的角速度积分,并通过四元数法进行坐标的转换也可以在短时间内获得较精确的航向,但是存在误差随时间累积的问题,因此不适合长时间导航。本文使用的MPU6050模块在进行航向估算时,采用了卡尔曼滤波器将传感器的数据进行融合,通过状态估计、动力学解算、数字滤波、卡尔曼滤波等方式对数据进行融合处理,最终获得稳定、精确的航向角。 相比于传统的行人航位推算算法,改进后的算法根据实际的检测环境对算法进行优化,提高了步态检测的准确性;同时相比线性模型,采用Weinberg方法估算步长能够依据个体和行走的差异获得不同的步长,增强算法的鲁棒性;采用的MPU6050模块,利用卡尔曼滤波器将传感器的数据进行融合,通过状态估计、动力学解算、数字滤波、卡尔曼滤波等方式对数据进行融合处理,能够快速地解算出精确的航向角。以广州市某下穿隧道中间某段为试验路段,如图6为优化后算法与传统算法定位坐标与实际坐标对比图,分析可知,在相同的起点,对比于传统的算法,优化后的算法具有较高的定位精度,能够正确地排除非正常行走的状态,保持定位的稳定。 图6 优化后算法与传统算法定位坐标与实际坐标对比Fig.6 Positioning coordinates of the optimized algorithm and the traditional algorithm compare with actual coordinates 根据《公路隧道养护技术规范》(JTJ H12—2015),隧道检测对象主要包括土建结构、机电设施和其他工程设施。其中土建结构由于病害数量较多、病害位置的分布较广,成为病害检测中的重要部分。 传统的病害描述方式可按检测前进方向、里程、左右侧、项目名称、病害类型、损害面积记录,如“RK11+057左侧拱墙车道一条纵裂,长5.00 m,宽1.5 cm”。如图7所示为隧道病害展开示意图,不同的形状分别表示不同的病害类型和新旧病害。 图7 隧道病害示意图Fig.7 Schematic diagram of tunnel diseases 电子地图能够直观地表示物体的二维位置信息,因此可以利用定位信息替代传统病害信息描述中的道数或里程。但是隧道是一个三维模型,隧道检测包括洞口、洞门、路面、衬砌等,因此利用合理的办法区分病害的竖向位置信息也至关重要。为了提高病害描述信息的精确度,方便后期维修人员的工作,同时兼顾传统病害信息描述方法,本文总结了一套适合基于手机定位的土建结构病害表示方法,见表2。 表2 基于手机定位的隧道常见病害类型和表示符号Tab.2 Common disease types and symbols of tunnel based on cellphone location 表2主要总结了隧道检测中常见的病害类型和表示符号,分别利用符号、形状、颜色区分病害的类型,新旧和类型。如图8为基于此方法的真实效果。试验表明基于此方法的手机病害定位表示具有良好的区分效果,有利于提高后期检测人员和维修人员的检查效率。 图8 电子地图中表示病害信息效果图Fig.8 Disease information renderings on electronic maps 为了验证改进后的算法在隧道中定位的实际效果,本文选取广州某下穿隧道为试验路段,分别以隧道的两侧出口,中间拐弯位置为特征点模拟设置病害位置,如图9所示。试验者从病害1位置出发按指定的路径途径病害2位置,最后到达病害3位置。在实验者行走过程中不断采集自身的位置坐标,最后将采集的位置坐标和实际位置坐标对比,如图10所示。由图可知,通过优化后的航位推算算法所计算的坐标轨迹基本和实际的坐标位置相“吻合”。取地球半径为6 371 229 m,分析图10可知,在起点病害1位置相同的情况下,计算病害位置2的实际坐标和惯性导航坐标的误差为1.42 m,病害位置3的实际坐标和惯性导航坐标的误差为1.97 m,实际坐标和惯性导航坐标相差最大误差为2.58 m。依据经验可知,在一个车道宽(取3.5 m)视野内的病害均能较好识别,因此可知,通过惯性导航算法所获得的定位误差满足病害定位的要求。 图9 模拟设置病害分布图Fig.9 Distribution graph of simulated diseases 图10 惯性导航轨迹坐标和实际位置坐标对比图Fig.10 Comparison diagram of inertial navigation track coordinates and actual position coordinates 本文在室内定位算法的基础上进一步对传统步态检测算法进行优化,考虑在隧道中检测时存在“假走”等状态,引入连续性、相似性检测,并对起步状态加入“5步检测”和“3S检测”,进一步提高了算法的鲁棒性。同时,在原有的检测报告基础上,总结了一套适合在电子地图中表示病害位置的描述方法。最后,将安卓手机和MPU6050模块通过无线蓝牙技术相结合,在电子地图上实现了隧道内部病害的精确定位。试验表明,引入的惯性导航算法能够满足病害定位的要求,通过手机在隧道内的定位,检测人员能够快速地寻找到病害的位置,提高了检测的效率,具有重要的工程价值。本文依据行人在实际检测过程中的实际情况对航位推算算法进行优化,使得其定位精度满足在大长隧道中的病害识别要求,但是定位精度仍具有很大的提升空间,未来的研究方向,可以在步长检测中引入机器学习模型,增加步长预测的准确性。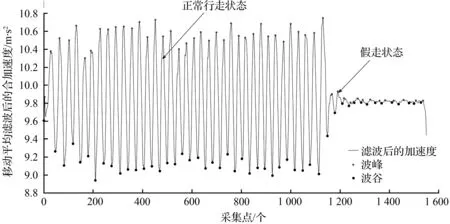
2.2 步长检测
2.3 航向估计
2.4 优化后算法与传统算法对比分析

3 隧道病害在智能手机中的显示设计
3.1 传统病害信息描述
3.2 基于手机定位病害信息描述设计
4 基于智能手机/MEMS惯性传感器的隧道病害定位试验研究
5 结论
猜你喜欢
少先队活动(2022年9期)2022-11-23
当代水产(2022年6期)2022-06-29
成都信息工程大学学报(2021年5期)2021-12-30
中国惯性技术学报(2020年2期)2020-07-24
成都信息工程大学学报(2019年2期)2019-08-28
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年5期)2016-03-22