车辆防碰撞预警系统概述*
2021-02-03 08:40史帅张泽龙韦映杏赵文琦庞树浚
科学与信息化 2021年3期
史帅 张泽龙 韦映杏 赵文琦 庞树浚
桂林电子科技大学计算机与安全学院 广西 桂林 541004
1 项目背景
2018年1月5日由发改委发布的《智能汽车创新发展战略》中提到二〇二〇年国内智能汽车新车占比要达到50%,二〇二五年中国标准智能汽车体系全面形成,到二〇三五年建成智能汽车强国。随着政策鼓励与智能交通的发展,汽车主动防碰撞系统研究也引起广泛关注,可靠、准确、实时的防碰撞算法是汽车主动防碰撞系统研究的核心。
目前,汽车主动防碰撞算法主要包括两种——安全时间算法和安全距离算法,但目前市面上利用两种算法构建的防碰撞模型存在准确性较低、不能反映路面信息等缺点甚至模型中的系统延迟时间和自车减速时间2个参数需要通过大量试验测定,限制了其推广和应用。针对上述情况,团队顺应国家鼓励完善智能汽车内部构造的需求提出该项目。该项目致力于新型防碰撞预警模型的建立,以有效改进传统模型,提高市面上智能汽车防碰撞系统的预警效率,完善中国智能汽车防碰撞系统市场[1]。
2 系统介绍
本系统采用激光雷达、毫米波雷达传感器对本车行驶前方120m之内的前方目标车辆或本车后方障碍物进行精确探测,将探测距离传递给中央处理器。小型乘用车采用专业星行减速电机执行刹车系统(现在同类产品大多数用蜗轮蜗杆电机作为执行刹车系统,易造成刹车抱死),其采集信号、处理数据、执行命令的响应速度领先同类系统。汽车自动防撞系统的数据处理系统是采用激光、毫米波、超声波探测传感技术,经过科学的论证、精确计算研制而成,雷达传感器探测前后方障碍物的距离,通过计算机编码程序,进行运算识别和处理,再根据处理要求向执行刹车系统发出指令,实现对执行刹车系统的控制,执行刹车系统能够按照要求进行有效制动。具有安全性能高、系统稳定、适应性强、抗干扰能力强、工作寿命长等优点。当本车与前方目标车辆小于安全距离时,报警系统以语音的形式执行中央处理器F达的报警指令,提醒驾驶员谨慎驾驶。中央处理器根据激光雷达传递的探测距离,结合本车及前方目标车辆本或车后方障碍物行驶速度进行综合分析、处理后,根据危险级别及时向报警显示系统或制动执行系统下达报警或制动命令。当本车即将与前方目标车辆发生追尾碰撞事故发生时,制动系统以减速或紧急制动的方式执行中央处理器下达的制动指令,主动避免事故的发生。倒车自动防撞器能向驾驶员发出危险警示信,显示本车与障碍物之间的距离;当车辆距离障碍物体较近,而驾驶员没有采取有效的刹车措施,即将与障碍物体发生碰撞时,该系统能够在事故发生前主动制动本车,从而避免事故的发生。
系统包括8大部分:
(1)信号采集模块:采用影像识别、激光雷达、毫米波雷达、超声波雷达等技术,自动测出本车速度以及与前方、后方障碍物之间的相对距离。
(2)数据处理模块:计算机高速芯片对车与障碍物之间相对距离以及车与障碍物之间的瞬时相对速度进行处理后,判断车与障碍物之间的安全相对距离,如果车与障碍物之间的距离小于安全距离,数据处理模块就会发出指令。
(3)显示模块:能及时显示系统参数设置、本车的车速、前、后方最具危险障碍物的距离,以嘀嘀声音提醒驾驶员前方有危险,请减速。
(4)执行刹车机构:负责实施数据处理系统发来的指令,当预警系统发出预警声音,提醒司机刹车,如司机没有采取措施,执行机构将执行数据模块控制系统的指令,刹车减速或紧急制动刹车。
(5)前方碰撞预警模块:它通过前方雷达信号采集模块和计算在行驶过程中车辆与前方车辆的碰撞信息来判断潜在的碰撞风险,并立即发出警示
(6)车距监控模块:汽车在行驶过程中,系统会显示本车车速和检测到本车与前方车辆或障碍物的距离。
(7)后方车辆防追尾警示模块:通过后方雷达信号采集模块和计算在行驶过程中后方车辆与前方车辆的碰撞信息来判断潜在的碰撞风险,并立即警报强光警示
(8)温度感应模块:不带ABS的汽车在行驶或启动状态,系统自动感应车外环境温度,低于 0°C,系统自动关闭执行指令,不刹车、只预警,避免结冰路滑导致安全事故[2]。


检测可视化图示
3 主要技术内容
背景差分法被广泛应用于运动目标的检测算法,主要利用视频图像中的当前帧图像和背景模型进行比较的方法,因此该方法需要预先建立背景模型,其检测效果直接受到背景模型的影响,其描述公式如下。
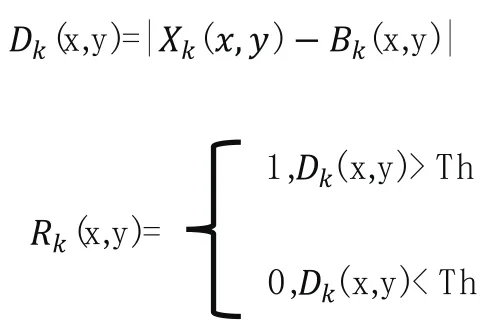
式中:Dk(x,y)为第k帧的差分图像,Xk(x,y)为第k帧图像,为第k帧的背景模型,Th是阀值,1为包含车辆区域,0为背景区域。
利用当前帧图像与背景模型相减,固定一个阀值,当差分图像的像素阀值大于这一阀值时,则认为当前帧图像的这些位置的像素区域是包含车辆区域,反之当差分图像的像素阀值小于这一阀值时,则认为当前帧图像的这些位置的像素区域是背景区域。
背景差分法主要适用于背景变化较小的尝试,且该方法极易受到光照条件的影响。若图像中背景物体的波动较大,背景中的场景不断变化,则需要对背景信息进行实时的更新,且对更新的要求也很高。
4 应用领域
随着汽车工业的不断发展,汽车的普及率不断上升,在汽车给人们的生活带来便利的同时,交通事故也成为日益严重的公共安全问题。大量研究表明,绝大多数交通事故是由于驾驶员的操作失误所致,这就推动了汽车防碰撞预警系统的发展。汽车防碰撞预警系统主要用于协助驾驶员持续不断地检测车辆前方道路状况,识别判断各种潜在的危险情况,并通过声音提醒驾驶员,避免因汽车高速、低速或偏离驾驶轨道而发生碰撞事故。
汽车防撞系统的发展趋势将从被动防撞减少伤害逐步向主动避撞减少事故方向发展。被动防撞主要依靠车体结构的耐撞性及座位安全带等约束系统来降低事故发生后乘客所受到的伤害,而汽车防碰撞系统致力于在事故发生前发出预警,从而避免事故的发生。当前市面上的汽车防碰撞系统种类繁多,但价格偏高,而且仍然存在功能缺陷。而我们的防碰撞系统由信号采集系统、数据处理系统及执行机构组成,经过不断的发展、改进,更加安全可靠。
在即将到来的5G时代,传统汽车将发生转变,随之而来的是与网络相关联的无人驾驶汽车。这将大大刺激车主对于汽车防碰撞系统的需求。汽车防碰撞系统不仅适用于普通汽车,也同样适用于公交车、货车等交通运输工具。它的功能包括驾驶习惯矫正、前车防撞预警、前方行人安全预警、车道偏离预警以及超速预警。一般来说,这种能够减轻整体驾车负担且能够有效帮助提高车辆安全性能及驾驶人身安全的技术是最受消费者关注的,因而该系统是具有广阔的市场前景和发展空间的。
5 结束语
本项目将实际问题转化为数学问题,根据实际情况收集模型参数,建立自己的数学模型,并用MATLAB进行仿真模拟,优化已有算法。该算法支持系统有效解决现有市场上安全防碰撞模型临界预警距离和临界制动距离分段预警准确性较低,不能反映路面信息等问题,能有效模拟前后车辆在相同的最大制动减速度情况下所需的安全预警距离,具有可靠性高、不影响驾驶员操作等优点。在智能汽车领域中为广大人民提供更有效更安全的汽车防碰撞系统。
猜你喜欢
汽车电器(2021年12期)2021-12-30
控制与信息技术(2021年3期)2021-07-22
汽车文摘(2021年4期)2021-04-05
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
大众汽车(2018年11期)2018-12-26
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10