
CSPB20T 混凝土喷射车臂架结构设计与有限元分析
2021-02-05 12:47郭爱军许联航胡树伟
矿山机械 2021年1期
郭爱军,许联航,宋 鑫,胡树伟
1国家能源集团神东煤炭集团技术研究院 陕西榆林 719315
2中国铁建重工集团股份有限公司 湖南长沙 410000
混凝土喷射可分为干式喷射混凝土和湿式喷射混凝土 2 种[2]。干式喷射混凝土主要借助干式混凝土喷射机,按一定比例将搅拌的水泥、粗细骨料和速凝剂等原料利用高压空气运输到喷射嘴,在喷射嘴处将混合干料高速喷射到围岩壁面上。湿式喷射混凝土则是指将水泥、粗细骨料、水和外加剂等原料按一定比例进行搅拌后,利用湿式喷射机将其输送到喷嘴,在喷嘴处添加速凝剂使其雾化,并用压缩空气使混凝土形成射流,从而喷射到围岩面上。湿式喷射混凝土施工相比于干式喷射混凝土施工而言,其混凝土抗压强度高,巷道围岩稳定性好,粉尘浓度低,大型湿喷机和机械臂进行混凝土喷射作业,可大大提高工程质量和施工效率[3-5]。
臂架作为湿式喷射机的重要部件,其设计安全性及合理性对湿喷机喷射效果至关重要。目前,关于对湿喷机臂架的研究,多是建立在动力学或者运动学模型后进行仿真分析。胡仕成等人建立了混凝土湿喷机臂架系统的动力学模型,并进行了仿真分析[6]。刘亚东等人运用 ADAMS 动力学仿真对机械臂的位姿误差进行了分析[7]。汪西应等人建立了工作臂的关节式机械系统运动分析模型,并应用 MATLAB 对工作臂的运动轨迹进行了仿真和验证[8]。刘在政等人建立了喷射机械手运动学模型,提出了一种结合混凝土喷射特性规划喷头驻足点实现智能喷射的方法[9]。臂架在湿喷机工作过程中,必须能实现多方位运动,使其运动范围可覆盖整个煤巷工作面,因此开展喷湿机结构设计及其在不同工况下性能分析的研究,确保臂架在不同工况下具有足够的安全性和稳定性,并保证施工顺利进行,具有重要的工程意义。
笔者针对 CSPB20T 混凝土喷射车臂架在工作过程中可能遇到的 3 种机械臂极限工况,建立了机械臂三维有限元模型,对不同机械工况下的机械臂进行分析以验证设计的安全性及合理性。研究结果和思路可为喷湿机臂架的结构设计和优化提供参考。
1 臂架结构
臂架结构及喷头装置结构示意如图 1 所示。臂架具有 9 个自由度,分别为:臂架水平回转和垂直回转、臂 1 俯仰、臂 2 俯仰、臂 3 水平和垂直回转、臂4 伸缩、喷头水平回转和垂直回转。该臂架运动范围可覆盖整个煤巷工作面。其运动具备以下几个特点:
(1) 回转台水平回转带动臂架和喷头水平回转,水平回转角度范围为 0~240°;
(2) 回转台垂直回转,垂直回转角度范围为±110°;
(3) 臂 1 液压缸实现臂 1 俯仰动作,俯仰角度范围为 -30°~ 60°;
世界第四大铁矿生产商,澳大利亚的福蒂丘集团也在厄瓜多尔设立了办公室,该公司承诺今年投资1亿美元进行勘探。
(4) 臂 2 液压缸实现臂 2 抬升,最大抬升角度为90°;
(5) 臂 3 通过液压马达可在水平和垂直方向旋转,水平和垂直回转角度范围均为 ±90°;
(6) 臂 4 可以根据需要长度自由伸缩,最大伸长行程为 1 300 mm;
(7) 喷头装配了 3 个液压马达,分别实现喷头整体 360°垂直回转、喷嘴 240°上下摆动和喷嘴的刷动。
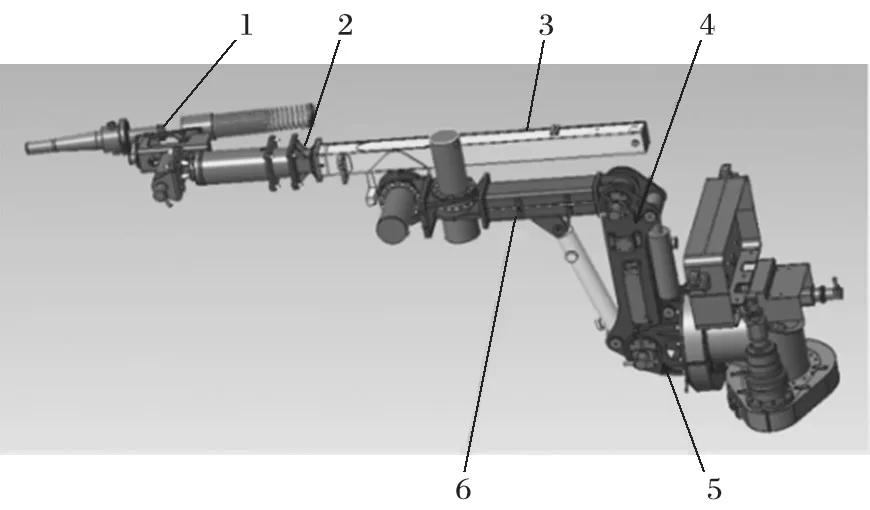
图1 臂架及喷头装置结构示意Fig.1 Structural sketch of boom and nozzle device
2 有限元分析
CSPB20T 混凝土喷射车臂架在工作过程中,可能遇到 3 种极限工况:机械臂伸出最长、机械臂伸出最高和侧向最宽。笔者按上述 3 种极限工况对其进行力学性能分析。
2.1 三维模型建立
为提高计算效率及有限元划分网格的精度,根据分析重点,去除喷嘴总成和减速器部件,对机械臂模型进行简化处理,得到简化后的机械臂三维模型,如图 2 所示。
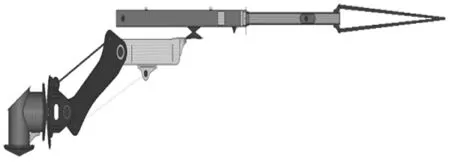
图2 机械臂三维模型Fig.2 3D model of manipulator
喷湿机臂架的材料选择 Q690E,肋板选择Q345B,材料的主要力学性能参数、极限工况下允许位移分别如表 1、2 所列。
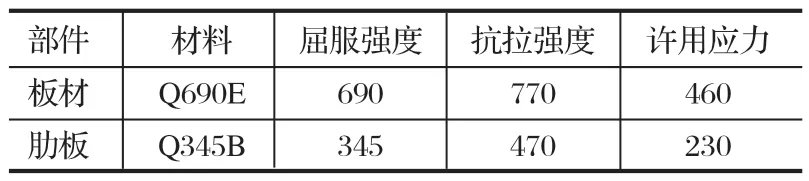
表1 喷湿机臂架材料力学性能参数Tab.1 Mechanical property parameters of boom of spray dryer MPa
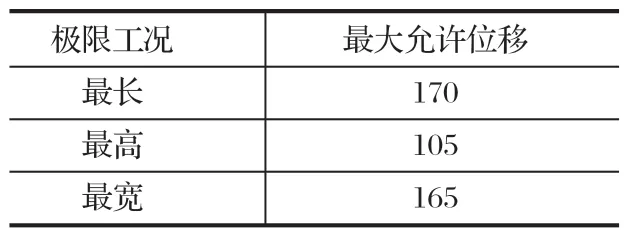
表2 极限工况最大允许位移Tab.2 Maximum allowable deformation in limit operation mode mm
2.2 载荷和边界
对喷湿机臂架模型施加重力载荷,重力加速度设为 9 800 mm/s2,对于为简化模型而去除的部件,通过其质量计算出重力,并以力的形式施加到模型上。模型的附加质量如表 3 所列。
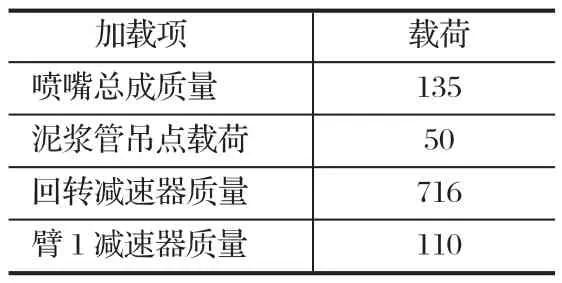
表3 附加质量Tab.3 Additional mass kg
在模型喷嘴处分别在正前、正上、正下、正左、正右 5 个方向施加大小为 500 N 的喷嘴反力。
2.3 机械臂伸出最长工况分析
机械臂伸出最长工况下,臂架的应力云图如图3 所示。臂架臂 2 内侧折弯板处应力云图如图 4 所示。臂架应力最大时的位移云图如图 5 所示。由图3、4、5 可知,在机械臂伸出最长工况下,喷射角度为正前方向时,臂架的最大应力为 471 MPa,最大位移为 97.0 mm;喷射角度为正上方向时,臂架的最大应力为 588 MPa,最大位移为 120.9 mm;喷射角度为正下方向时,臂架的最大应力为 360 MPa,最大位移为 74.4 mm;喷射角度为正左方向时,臂架的最大应力为 492 MPa,最大位移为 99.8 mm;喷射角度为正右方向时,臂架的最大应力为 456 MPa,最大位移为99.7 mm。最大应力均出现在臂 2 内侧折弯板处。最大位移均出现在喷嘴处,臂架其余部件位移均不超过70.0 mm。

图3 机械臂伸最长时臂架应力云图Fig.3 Stress contours of boom at longest extension of manipulator
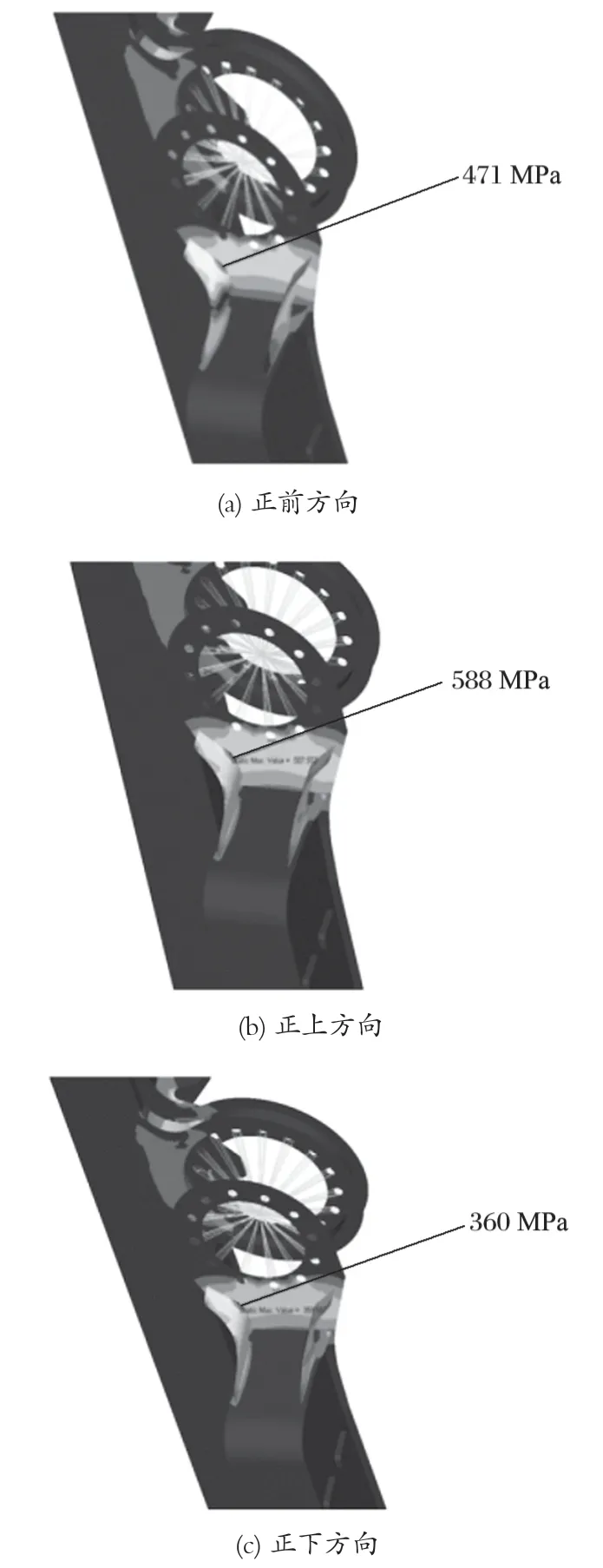
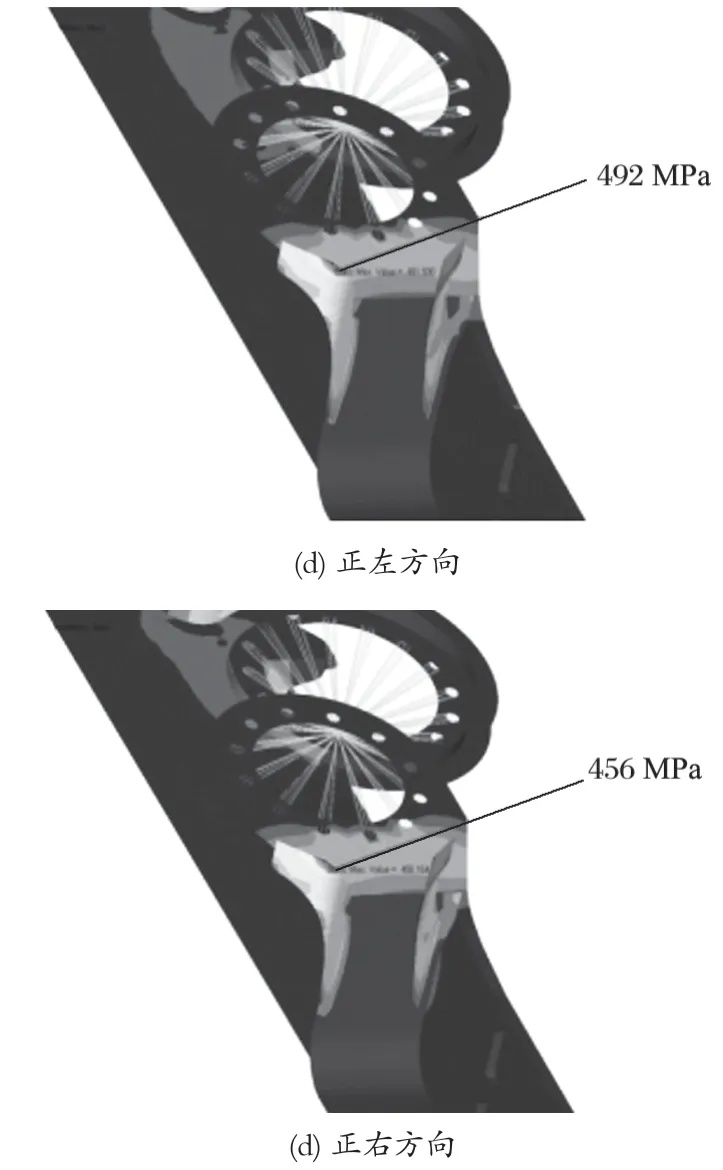
图4 机械臂伸最长时臂 2 内侧折弯板处应力云图Fig.4 Stress contours of bending plate inside arm two at longest extension of manipulator

图5 机械臂伸出最长臂架应力最大时的位移云图Fig.5 Displacement contours of manipulator at longest extension and maximum stress
2.4 机械臂伸出最高工况分析
机械臂伸出最高时,臂架的应力云图如图 6 所示,臂架的应力最大时的位移云图如图 7 所示。
由图 6、7 可知,在机械臂伸最出高工况下,喷射角度为正前方向时,臂架的最大应力为 46 MPa,最大位移为 5.6 mm;喷射角度为正上方向时,臂架的最大应力为 88 MPa,最大位移为 25.0 mm;喷射角度为正下方向时,臂架的最大应力为 153 MPa,最大位移为 31.8 mm。最大应力均出现在臂 2 内侧折弯板处。最大位移均出现在喷嘴处,臂架其余部件位移均不超过 25.0 mm;喷射角度为正左方向时,臂架的最大应力为 60 MPa,最大位移为 23.1 mm;喷射角度为正右方向时,臂架的最大应力为 64 MPa,最大位移为 16.5 mm,最大应力均出现在伸缩臂臂头处。在机械臂伸出最高时,最大位移均出现在喷嘴处,臂架其余部件位移均不超过 15.0 mm。

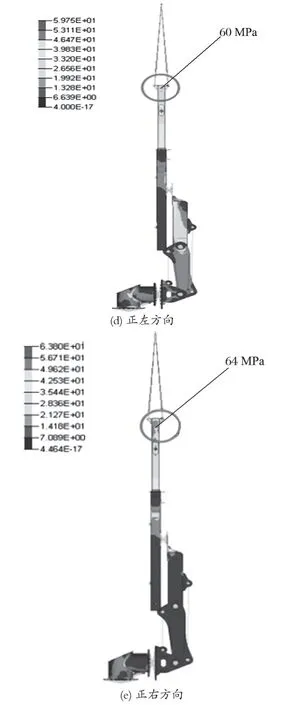
图6 机械臂伸出最高时的应力云图Fig.6 Stress contours of manipulator at highest extension
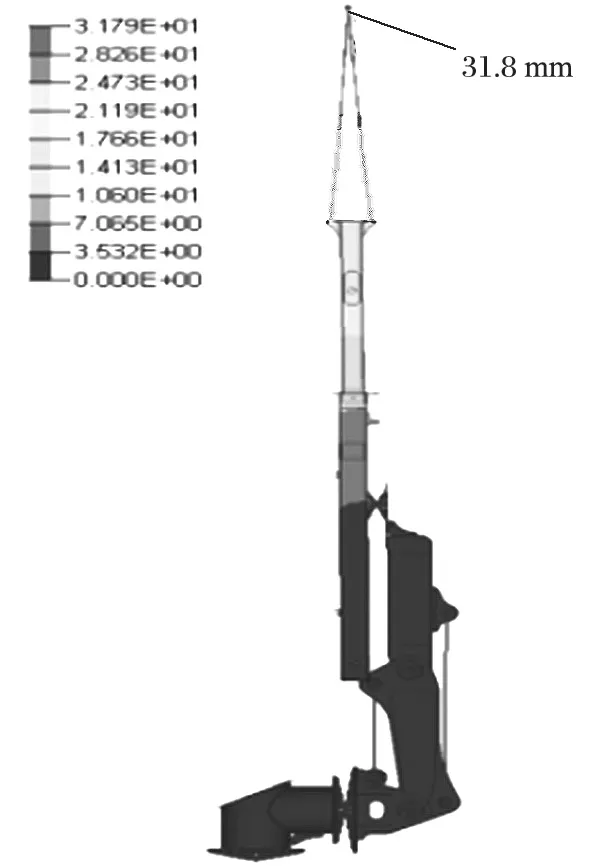
图7 机械臂伸出最高臂架应力最大时的位移云图Fig.7 Displacement contours of manipulator at highest extension and maximum stress
2.5 机械臂侧向最宽工况分析
机械臂侧向最宽工况下,臂架的应力云图如图 8所示,臂架最大应力时的位移云图如图 9 所示。

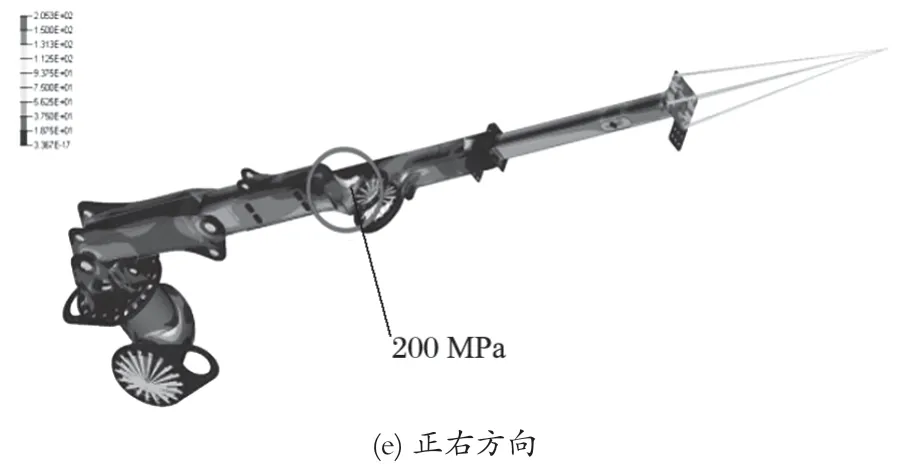
图8 机械臂侧向最宽工况下的应力云图Fig.8 Stress contours of manipulator in widest lateral posture mode
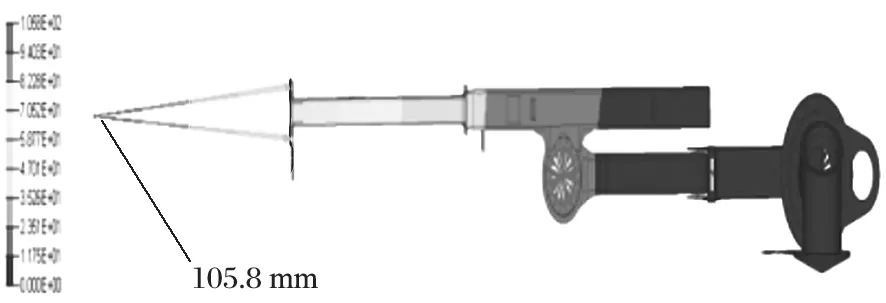
图9 机械臂侧向最宽工况下臂架应力最大时的位移云图Fig.9 Displacement contours of manipulator at maximum stress in widest lateral posture mode
由图 8、9 可知,在侧向最宽工况下,喷射角度为正前方向时,臂架的最大应力为 173 MPa,最大位移为 85.8 mm,最大应力出现在伸缩臂臂头处,同时在液压缸销轴安装孔处的应力为 161 MPa;喷射角度为正上方向时,臂架最大应力为 214 MPa,最大位移为 105.8 mm,最大应力出现在液压缸销轴安装孔处;喷射角度为正下方向时,臂架的最大应力为 116 MPa,最大位移为 66.8 mm,最大应力位置与喷射角度为正上方向时相同,也出现在液压缸销轴安装孔处;喷射角度为正左方向时,臂架的最大应力为 192 MPa,最大位移为 90.0 mm,最大应力位置出现在臂2 外侧折弯板处;喷射角度为正右方向时,臂架最大应力为 200 MPa,最大位移为 90.0 mm,最大应力均出现在臂 2 内侧折弯板处。在侧向最宽工况下,臂架最大位移出现在喷嘴处,臂架其余部件位移均不超过70.0 mm。
2.6 臂架校核
臂架 3 种极限工况下有限元分析结果如表 4 所列。
由表 4 可得出以下结论:
(1) 机械臂伸出最长工况下,臂架受力最为恶劣,在臂 2 回转液压马达安装座附近应力均超过许用应力 230 MPa,有失效风险。
(2) 机械臂伸出最高工况下,臂架整体受力和位移最小,各部件均满足强度和刚度要求。
(3) 侧向最宽工况下,伸缩臂液压缸安装孔附近最大应力为 214 MPa,最大位移为 105.8 mm,在最大允许位移内。在该工况下,臂架没有失效风险。
(4) 臂架最大位移均出现在喷嘴处,而臂架其他位置的位移随着与喷嘴距离的增大而减小,位移最大不超过 70 mm,表明臂架刚度裕量充足,满足设计要求。

表4 臂架极限工况下有限元分析结果Tab.4 Finite element calculations of boom in limit operation modes
3 结构改进
为使臂架在机械臂伸出最长工况下具有足够的强度,对臂 2 回转液压马达安装座进行优化和加强处理,减小危险区域的应力集中。
将液压马达折弯板进行加强处理,肋板材质由Q345B 更换为 Q690E,厚度由 8 mm 增加到 15 mm,机械臂优化后伸出最长工况下的应力云图如图 10 所示。由图 10 可知,机械臂伸出最长工况下各载荷方向最大应力值分别为 194、242、148、203、187 MPa,最大应力值小于材料许用应力 460 MPa,满足设计要求。


图10 机械臂优化后伸出最长时的应力云图Fig.10 Stress contours of manipulator at longest extension after optimization
4 结语
通过对混凝土喷射车在工作过程中的 3 种机械臂极限工况进行有限元分析,得出不同工况下不同喷射角度时,臂架的应力和位移分布情况。分析结果表明:机械臂伸出最高工况下,臂架整体受力和位移最小,各部件均满足强度和刚度要求;侧向最宽工况下,在伸缩臂臂头和液压缸销轴安装孔处应力集中,但其应力最大值未超过所用材料许用应力,整体位移小;机械臂伸出最长工况下,臂 2 回转马达安装座附近应力存在最大值,有失效风险。在设计过程中需要对臂 2 回转马达安装座进行加强处理,确保臂架安全作业。该研究结果可为其他混凝土喷射车臂架结构设计和优化提供理论参考。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
鞍钢技术(2022年3期)2022-06-12
科技创新与应用(2022年14期)2022-06-02
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
学校教育研究(2020年3期)2020-02-18
科技与创新(2018年9期)2018-05-07
中国高新技术企业(2017年11期)2017-07-08
智能制造(2015年9期)2015-10-15
小天使·四年级语数英综合(2015年3期)2015-04-20
