基于严格解析谱的多接收子阵合成孔径声呐CZT 算法*
2021-02-25 06:27马梦博钟何平
计算机与数字工程 2021年1期
姜 涛 马梦博 钟何平
(1.海军工程大学科研学术处 武汉 430033)(2.海军工程大学海军水声技术研究所 武汉 430033)
1 引言
由于水中声速较低,广泛应用于合成孔径雷达(SAR)领域的“停走停”假设在合成孔径声呐(SAS)不再成立[1],需要建立“非停走停”模型,而实用的SAS 一般采用多接收子阵技术[2]。“非停走停”和收发分置模式导致每一收发阵元对的距离历程是双根号之和形式,难以求解点目标响应二维谱解析表达式,从而对使用基于傅里叶变换的快速成像算法带来不利[3]。
文献[4]借鉴顺轨双基地SAR精确二维谱的求解方法[5~6],重新建立了“非停走停”模式下的多接收子阵SAS距离史几何模型,并对其二维谱进行了精确推导。然而,由于精确的二维谱表达式非常复杂,文献[4]只将其应用于RD算法,RD算法中距离徙动校正(RCMC)需要用到插值操作,算法效率很低。
本文首先建立了“非停走停”模式下的多接收子阵SAS回波距离史模型,然后给出了点目标的精确二维谱。分析RCM 空变性后发现,RCM 非常接近斜距变量的线性函数,而RCMC是对回波信号包络的校正,只要校正误差不超过一个距离分辨单元即可,所以可将复杂的RCM 做一定近似,使其变为斜距变量的线性函数,然后利用Chirp-z变换[7~10]进行RCMC,从而避免了插值运算,提高了算法效率,保证了相位保真度。仿真实验表明:基于严格解析谱的CZT 算法成像精度在近距离处优于基于DPC近似[11]的CZT算法。
2 多接收子阵SAS回波信号
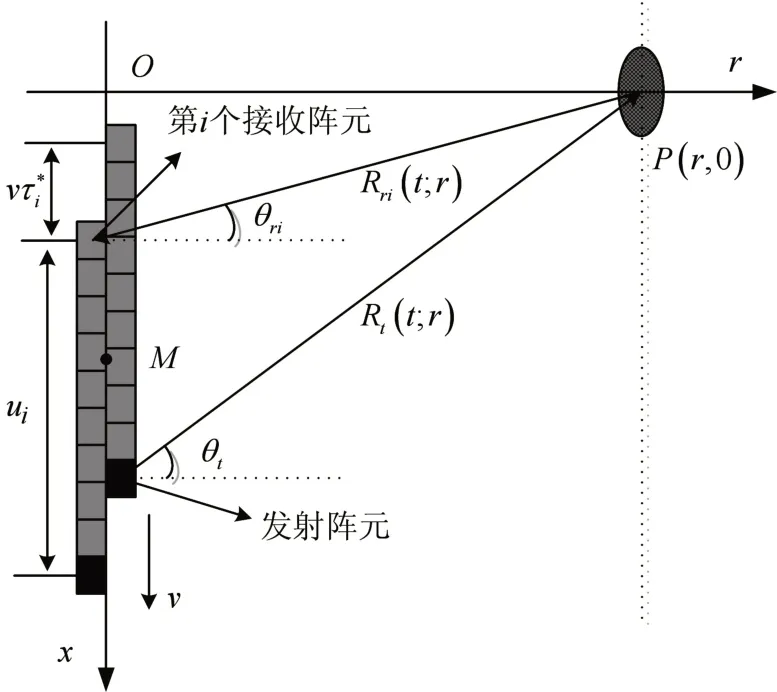
图1 多接收子阵SAS几何模型
多接收子阵SAS 几何模型如图1 所示,坐标轴定义如下,r轴表示距离向(斜距),x轴表示方位向,平台沿方位向以速度ν匀速直线运动。假设海底为理想平面,任意点目标为P(r,0 ),在“非停走停”模式下,发射阵元(黑色方块)以频率PRF 发射脉冲信号,脉冲信号经点目标反射后被N个接收阵元(灰色方块)接收,M点表示发射阵元与第i个接收阵元的中点,θt和θri分别表示发射时刻和第i个接收阵元接收时刻的斜视角。ui表示发射阵元与第i个接收阵元的距离,表示脉冲发射到被第i个接收阵元接收这段时间内平台移动的距离。x=νt表示t时刻M点的位置,则发射阵元、第i个接收阵元与点目标的距离可分别表示为
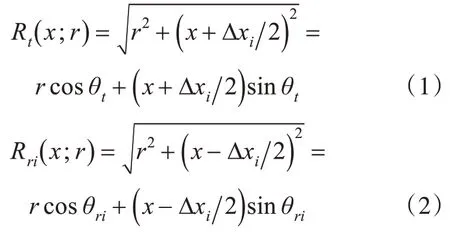
则第i个接收阵元距离史为
假设发射信号为线性调频脉冲信号,则第i个接收阵元接收到的回波信号基带形式可以表示为
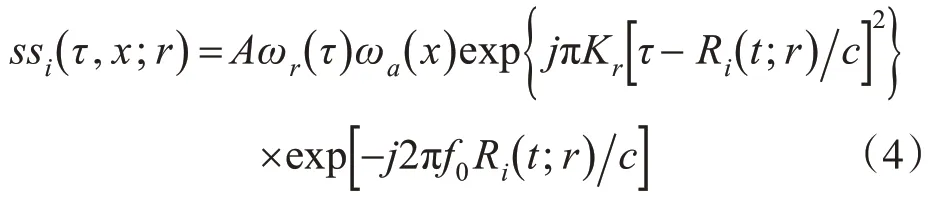
其中f0表示发射脉冲信号中心频率,Kr表示发射脉冲信号的调频斜率,ωr(τ)表示发射脉冲信号包络,ωa(t)表示方位向天线方向图,A表示幅度项,如无特别说明,后文公式推导忽略与成像质量无关的幅度项。
3 基于严格解析谱的CZT算法
3.1 波数域点目标响应二维谱
对式(4)进行二维FFT可得
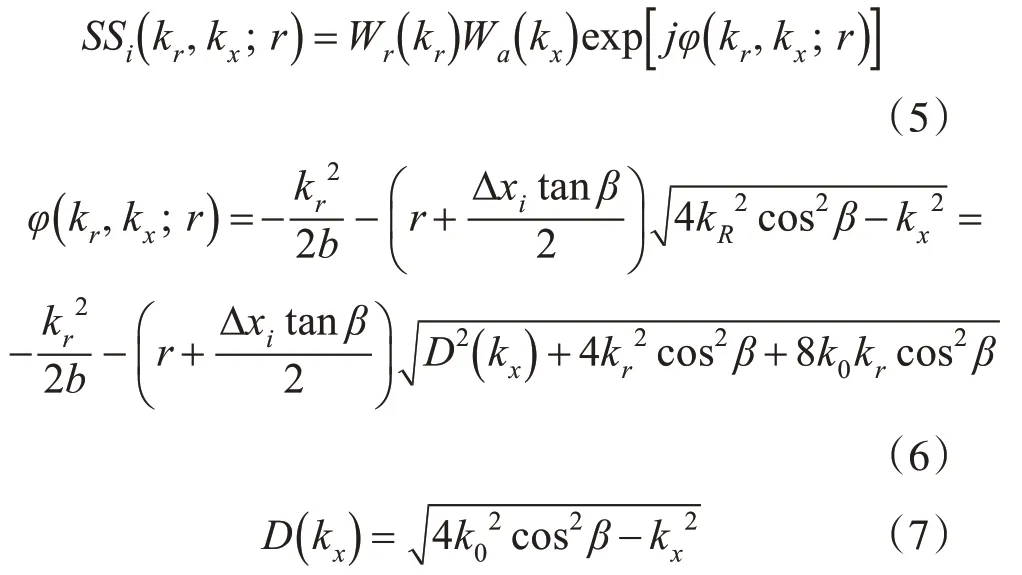
其中Wr( · )表示发射信号频谱包络,fr为距离向基带频率,表示方位向波数,fa为方位向向多普勒频率,表示距离向中心波数,表示距离向基带波数,kR=k0+kr表示距离向波数。
根据文献[4,12]可得半双基角近似表达式为
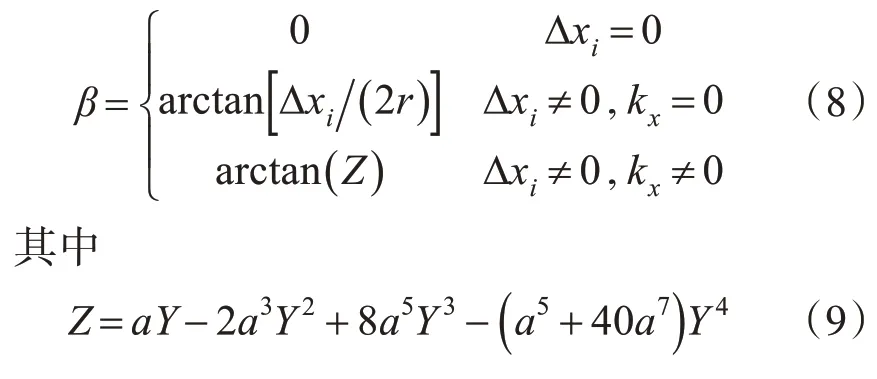
由于半双基角β一般很小,在窄带条件下,可以近似认为β与距离向基带波数kr无关,即

将式(6)中的根式展开成kr的幂级数,保留至项,则
时,式(12)中的高次项可忽略。
由于多接收阵SAS一般工作在正侧视模式,且半双基角β一般很小,所以条件(13)成立。忽略式(12)中高次项,并进行整理的到
式(14)中第一项为方位调制项,第二项为距离徙动项,第三项为距离压缩项与二次距离压缩项。由于距离徙动项是距离变量r的非线性函数,从而无法直接运用Chirp-z 变换进行距离徙动校正,所以必须首先对距离徙动项进行线性化处理。
3.2 距离单元徙动空变性分析
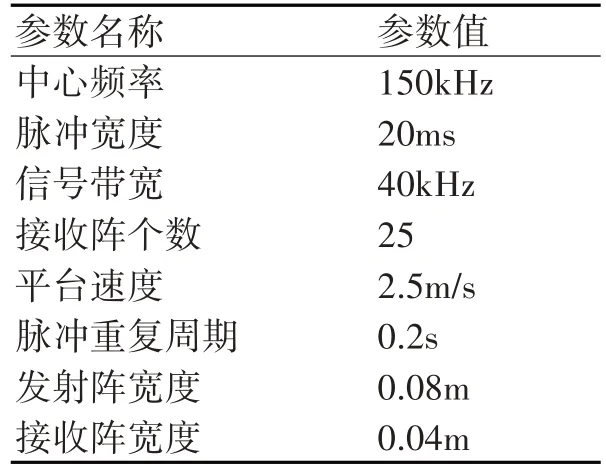
表1 仿真参数
记精确距离单元徙动为

式(15)中RRCM(kx,r)是方位向波数kx和距离变量r的函数,设声呐参数如表1 所示,距离单元徙动RRCM(kx,r)随r和kx变化如图2(a)所示,阵元间距取最大值ui=1m。
由于β和D(kx)与距离变量r弱相关,且Δxi<<r,为使RRCM(kx,r)变为距离变量r的线性函数,不妨设近似距离单元徙动

其中rc表示参考距离,βc表示参考距离处的半双基角,则 距 离 单 元 徙 动随r和kx变化如图2(b)所示。
定义式(15)与式(16)的近似误差为ΔR,即

近似误差 ΔR随r和kx变化如图2(c)所示。
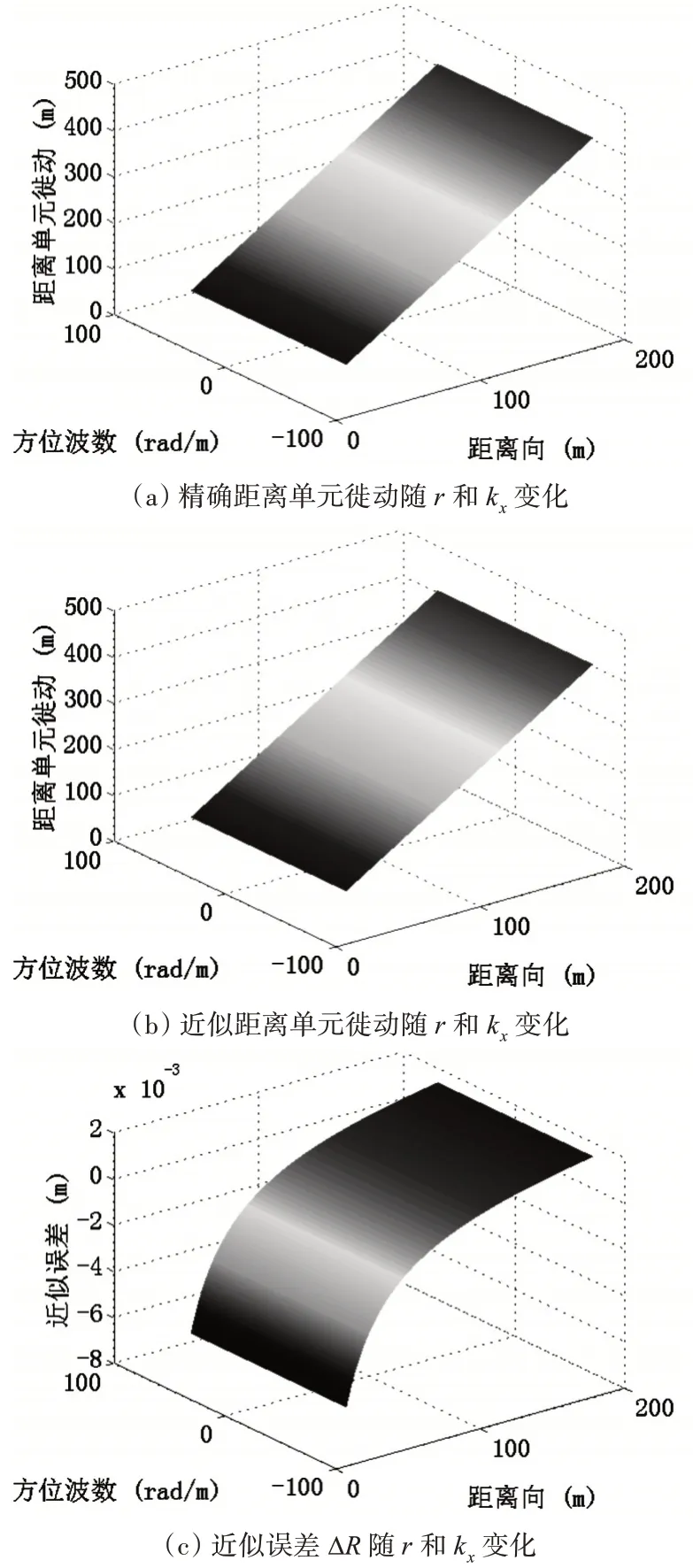
图2 精确距离徙动与近似距离徙动比较
对比图2(a)与图2(b)可以发现,线性处理后的距离单元徙动与原始距离单元徙动RRCM(kx,r)变化规律几乎一样,两者的差值,即近似误差 ΔR反应在图 2(c)中,从图 2(c)中可以看出,近似误差 ΔR远小于一个距离分辨单元0.0187m,用线性处理后的距离单元徙动进行距离徙动校正可满足成像要求。
3.3 基于严格解析谱的CZT算法流程
对于每一个接收阵元而言,方位向都是欠采样的,但可以采用方位谱扩展方法,沿方位向对每个接收阵元的二维谱进行扩展。然后再利用传统的收发合置CZT算法进行成像处理。具体步骤如下。
步骤1距离压缩和SRC。该操作通常在二维频域进行,但是由于该域不能同时表征距离和距离频率,因此一般通过与一个参考距离处的参考相位相乘予以消除,参考因子为
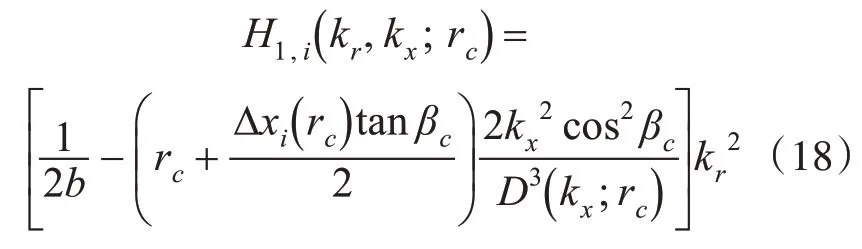
步骤2利用Chirp-z 变换校正RCM。首先以参考距离对RCM进行一致补偿,参考因子为
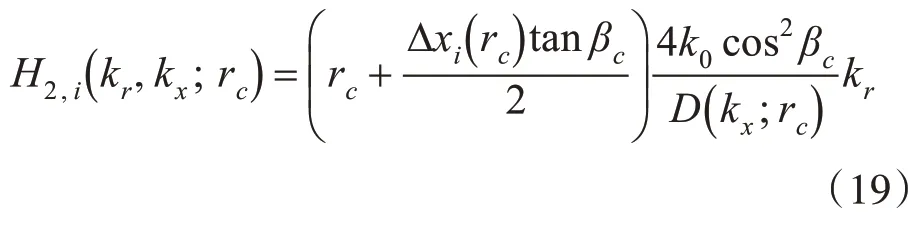
这一操作可以与步骤1 一起进行。此时二维谱可表示为
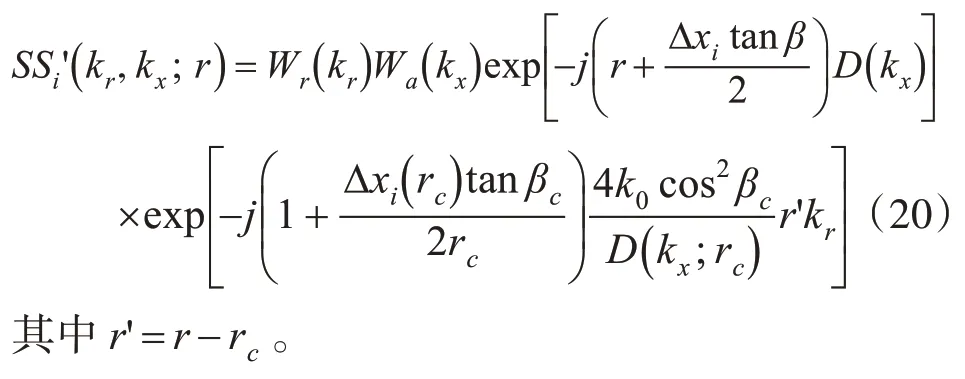
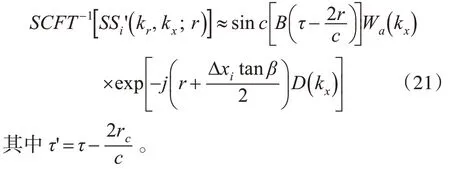
则式(21)可以写成
式(22)表明Chirp-z变换可以通过两次相位乘和一次卷积完成,即二维谱先与进行复乘,然后与进 行 卷 积 , 最 后 与复乘。其中卷积操作可通过FFT快速实现。
步骤3方位压缩和剩余相位校正。该操作通常在RCMC之后于RD域通过与一个距离空变的参考相位相乘予以校正,参考因子为

此时距离多普勒域信号可表示为

步骤4数据融合与方位IFFT。对所有接收阵元回波信号完成上述操作后,将其进行叠加,即

数据融合之后,经过方位向IFFT 回到二维时域即可获得重建的SAS图像。具体流程如图3 所示。
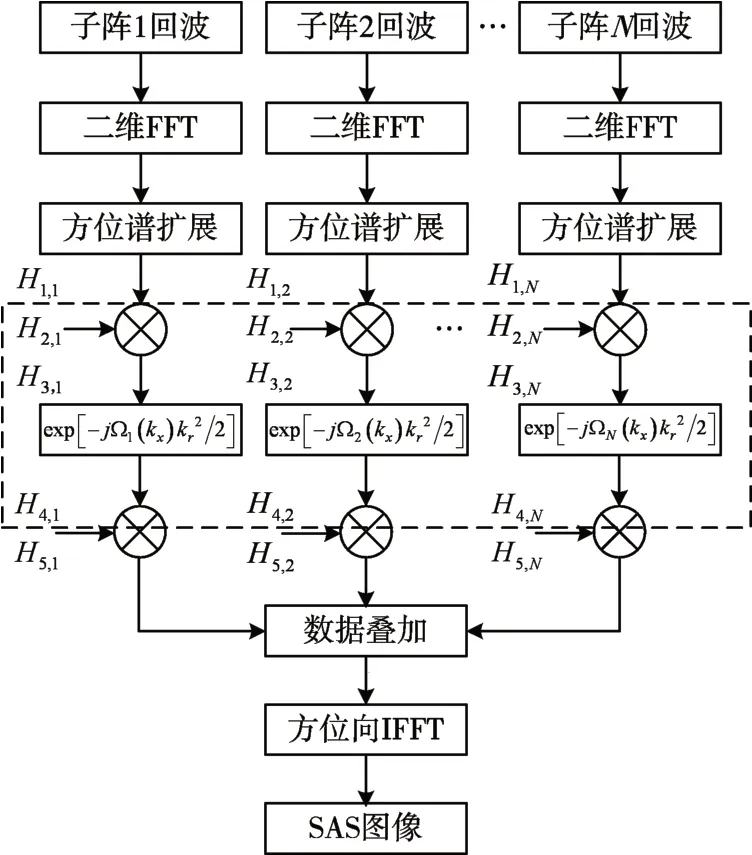
图3 基于严格解析谱的CZT算法流程图
4 仿真实验
为验证本文算法的正确性,下面对不同距离点目标进行仿真,仿真参数如表1 所示。在场景中的近距离和远距离处分别设置一个点目标,坐标分别为(4 0,10 )和 (1 30,10 )。分别采用基于DPC 近似的CZT 算法和基于严格解析谱的CZT 算法进行成像处理,成像处理过程中方位向和距离向均不加任何窗函数,对于近距离点目标的成像结果如图4 所示。
从图4 中可以看出,对于近距离点目标,采用基于DPC 近似的CZT 算法和基于严格解析谱的CZT 算法得到的图像在方位分辨率上没有明显差别,但采用基于DPC近似的CZT算法得到的图像的旁瓣明显高于采用基于严格解析谱的CZT 算法得到的图像的旁瓣。
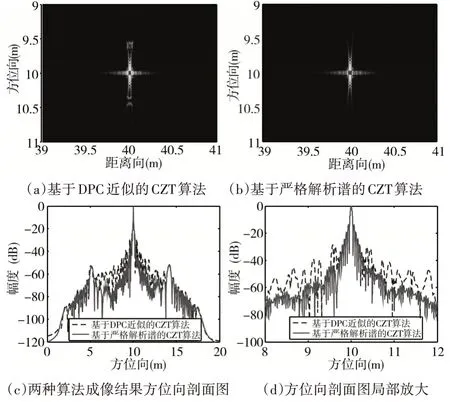
图4 近距离点目标成像结果
对于远距离点目标,成像结果如图5 所示。
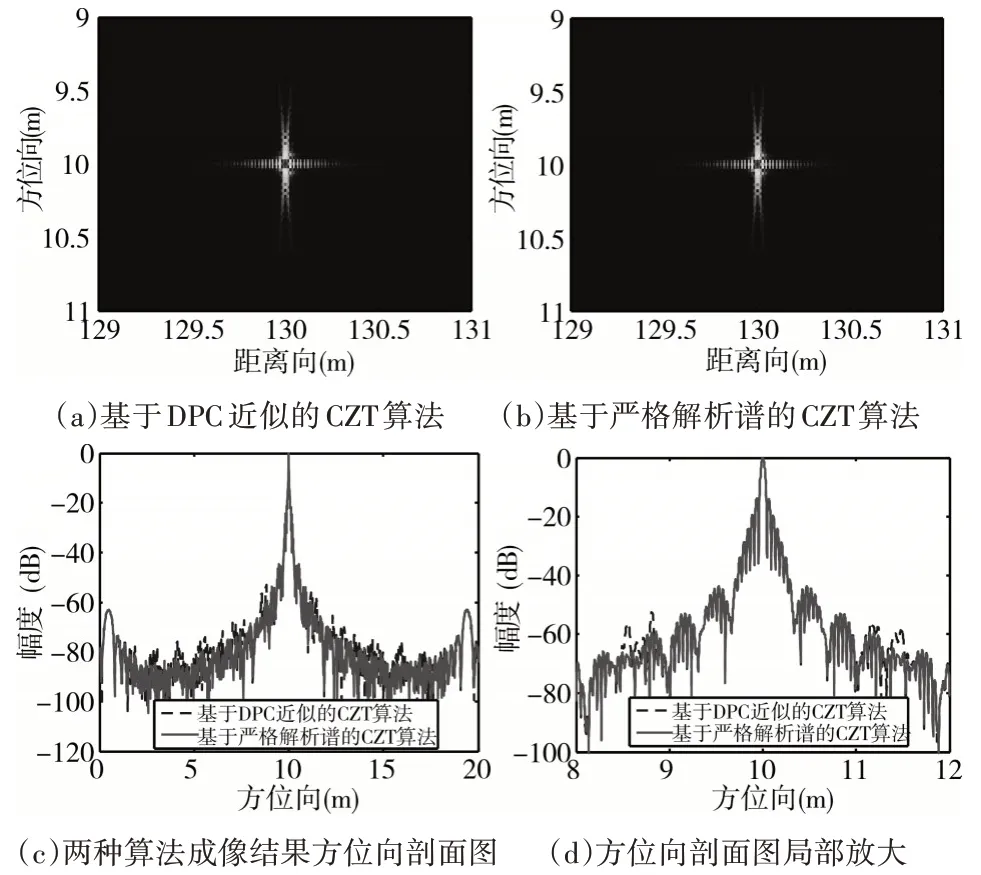
图5 远距离点目标成像结果
从图5 中可以看出,对于远距离点目标,采用基于DPC 近似的CZT 算法和基于严格解析谱的CZT 算法得到的图像在方位分辨率上没有明显差别,但采用基于DPC近似的CZT算法得到的图像的旁瓣还是略高于采用基于严格解析谱的CZT 算法得到的图像的旁瓣。
综合以上两种情况不难发现,基于严格解析谱的CZT算法在方位分辨率方面没有明显优势,其主要优势体现在旁瓣上,尤其是在近距离处,这是由于DPC近似在近距离处误差较大导致,而采用严格解析谱的方法则可以避免这种误差。
5 结语
本文基于的严格解析谱,将其RCM 近似为斜距变量的线性函数,然后利用Chirp-z 变化校正距离徙动,进而提出基于严格解析谱的多接收子阵SAS CZT 算法,最后通过仿真实验验证了本文算法相对于基于DPC近似的CZT算法更加精确。
猜你喜欢
人民长江(2021年9期)2021-10-18
大众摄影(2018年6期)2018-06-19
语文世界(小学版)(2018年3期)2018-03-22
佛山陶瓷(2017年8期)2017-09-06
中学生理科应试(2017年4期)2017-07-08
中学化学(2017年2期)2017-04-01
福建中学数学(2016年7期)2016-12-03
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15
党的生活·党员电教与远程教育(2009年2期)2009-05-13