城市道路场景下驾驶注意力需求的影响因素研究
2021-02-27 08:14刘卓凡赵霞吴付威
交通运输系统工程与信息 2021年1期
刘卓凡,赵霞,吴付威
(1.西安邮电大学,现代邮政学院,西安710061;2.长安大学,汽车学院,西安710064)
0 引言
城市道路场景交通结构复杂、交通变量类型多样,具有随机性和不确定性特点。据统计,我国城市道路里程占全国道路总里程的7.5%,但城市道路交通事故却占全国道路交通事故的45.8%。驾驶人作为人-车-路系统的核心,忽视重要交通变量,是影响交通安全的重要因素。因此,有必要研究影响城市道路环境下驾驶注意力需求的交通因素。
驾驶注意力需求是指单位时间或单位距离内驾驶人需要处理的交通信息量[1]。鉴于视觉系统是驾驶人获取交通信息的主要通道,许多研究通过分析驾驶人的视觉行为研究驾驶注意力需求[2]。当驾驶人将视线转移至与驾驶无关的目标时,其环境感知力将随视线转移时长的增加而下降。Kircher等[3]指出,驾驶人的环境感知力一般不会超过个人不确定度的承受极限。Senders[4]基于目标信息的衰减速度,提出外界交通环境越复杂,驾驶人需要观察周围交通信息以更新自我感知力的频率也就越高。
各个交通目标的可预测性与其自身特征有关,比如相对空间位置、运动状态等。有研究指出,驾驶注意力需求随弯道曲率的增加而增加;跟车距离越近,对驾驶注意力需求越高[5]。可以推测,当驾驶人在短时间内需要获取和处理更多的交通信息时,驾驶场景对注意力的需求也就更高。Tivesten[6]发现,驾驶人观察对向车辆的时长和频率明显多于对前车的观察,说明不同交通参与者对驾驶注意力的需求不同。
视线遮挡技术(Vision Occlusion)可以用来评估驾驶人在什么时刻/位置需要多长时间获取交通信息[7]。Vision Occlusion 的默认状态可以是遮挡状态,也可以是非遮挡状态;遮挡时长既可以由驾驶人自己控制,也可以由实验设定。有学者将Vision Occlusion 的默认状态设为非遮挡状态,让驾驶人自己选择视线遮挡时刻和遮挡时长,研究高速驾驶过程中驾驶注意力需求特性[8]。但在实际驾驶过程中,视线离开前方道路的时间并不完全取决于驾驶人,有些驾驶次任务具有较强的强迫性。这种情况可以通过预设不同视线遮挡时长,让驾驶人根据自我的环境感知力主动遮挡视线进行模拟[9]。
综上所述,驾驶注意力需求随交通环境的复杂度而变化。目前对驾驶注意力需求的研究多局限于驾驶环境复杂度对注意力整体需求的区别,或是不同驾驶任务对驾驶注意力需求的影响,或是某个交通变量对驾驶注意力的需求特性[10]。这些研究从宏观上分析了驾驶注意力的需求变化,有助于理解某一特定条件下的注意力需求。但综合考虑城市交通场景中各个交通变量对驾驶注意力需求,即驾驶人需要在什么时候/地点、观察哪些目标,尚未开展系统研究。鉴于此,本文采用视线遮挡方法,以视线遮挡概率反向表示驾驶注意力需求等级,利用逐步逻辑回归模型[11],探索城市道路场景下各个交通变量对驾驶注意力的需求等级和需求方式。
1 研究方法
1.1 被试驾驶人
实验选取30位被试的数据进行分析。包括男性18人,女性12人,年龄在22~75岁,平均年龄34.4岁(标准差为6.0),驾龄在2~57年,平均驾龄15.2年(标准差为14.5)。
1.2 实验设备
实验在固定基座的自动挡驾驶模拟器上展开。驾驶场景显示系统由9个显示器组成,可以提供180°×30°范围的视野,并由一个戴在被试手指上的微型开关按钮控制。按下开关按钮,可以关闭前方水平方向110°视野范围的显示器,间接模仿驾驶人视线离开道路前方的状态[7]。
1.3 实验设计和实验过程
设计基准实验和对照实验,对照实验包含5个不同固定遮挡时长子实验。在基准实验中,被试正常驾驶,不需要遮挡视线。在对照实验中,当被试自我感觉不需要观察交通环境时,遮挡前方视野。前方屏幕关闭一段时间后,会自动开启。关闭时长由每次子实验设定的遮挡时长决定。选取1.0,1.4,1.8,2.2,2.6 s作为5个子实验的固定遮挡时长。所有子实验均为同一城市道路场景,双向4 车道,每个车道宽3.5 m,限速为60 km·h-1,包含对向车辆、弯道、路边停放车辆、公交车站、行人及十字路口等常见的交通变量。此外,实验车辆前方有车速为60 km·h-1的引导车辆,被试保持适当跟车距离。
首先,被试阅读并签署实验知情同意书,填写个人基本信息表;其次,被试驾驶模拟器,熟悉交通环境,并进行正式实验,先后完成6次子实验。
2 数据分析
鉴于视线遮挡时长固定,认为驾驶场景中各个位置的遮挡次数越多表示剩余注意力越多,对驾驶注意力需求越低。因此,本文采用视线遮挡概率反向表示交通场景对驾驶注意力的需求等级。采用逐步逻辑回归模型分析遮挡概率与交通变量的关系,构建注意力需求等级模型,并分析交通变量对视线遮挡行为的影响方式。通过车速、时间和驾驶距离之间的关系,利用邻近插值法对时间域内的数据重新采样转换为空间域数据,分析遮挡概率随驾驶路线的变化。
3 实验结果
3.1 遮挡概率分析
遮挡概率是指实验路段各个位置的遮挡次数与总实验次数之比,表示各个位置的驾驶注意力需求等级。遮挡概率越高说明当前路段的可预测性越高,对驾驶注意力需求也相对越低。分别计算各个遮挡时长下的视线遮挡概率沿实验路线的变化曲线,如图1所示。
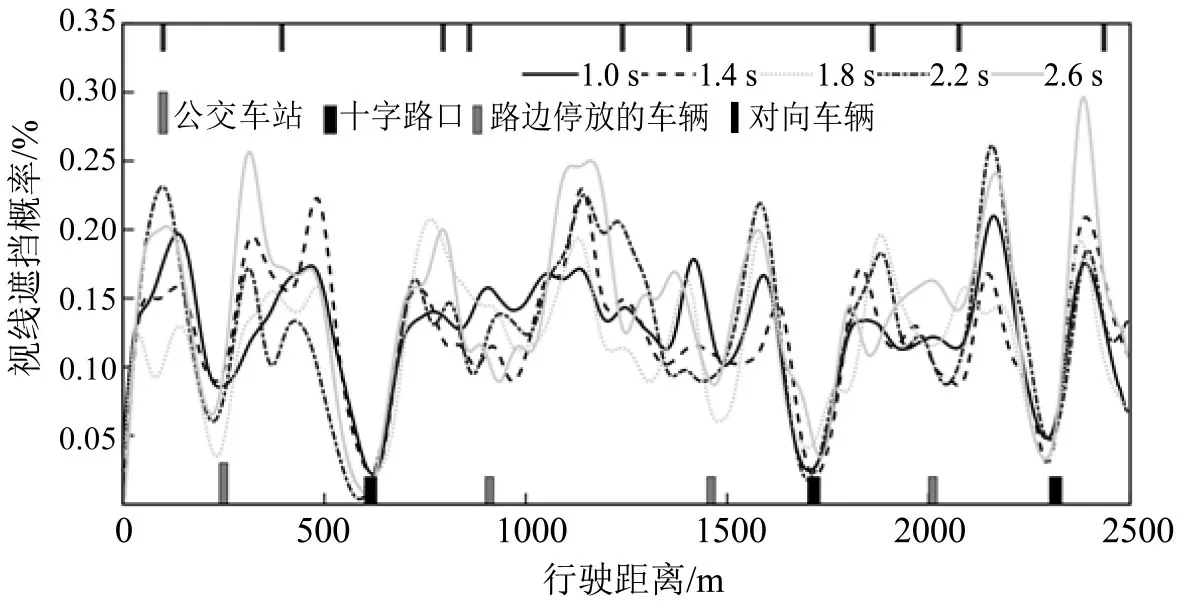
图1 视线遮挡概率随驾驶路线的变化分布Fig.1 Probability of visual occlusion along driving route
由图1可知,视线遮挡概率沿实验路线出现明显波动,受不同交通变量影响的差异较大。当自车接近公交车站和路边停放车辆时,视线遮挡概率明显降低。当自车与对向车辆相遇时,最长遮挡时长的遮挡概率明显降低,在短遮挡时长下也出现类似现象。另外,较长视线遮挡时长下的遮挡行为会集中在一些特定路段,而短遮挡时长下的遮挡行为在整个实验路段的分布都比较均匀,这说明驾驶人会根据外界交通环境特征自动调整自我注意力需求。另外,驾驶人在十字路口的视线遮挡概率接近于0。说明城市道路的十字路口对视觉注意力需求较大。
3.2 注意力需求影响因素回归模型
本文选取9 个可能影响驾驶人注意力需求的交通变量,具体解释如表1所示。
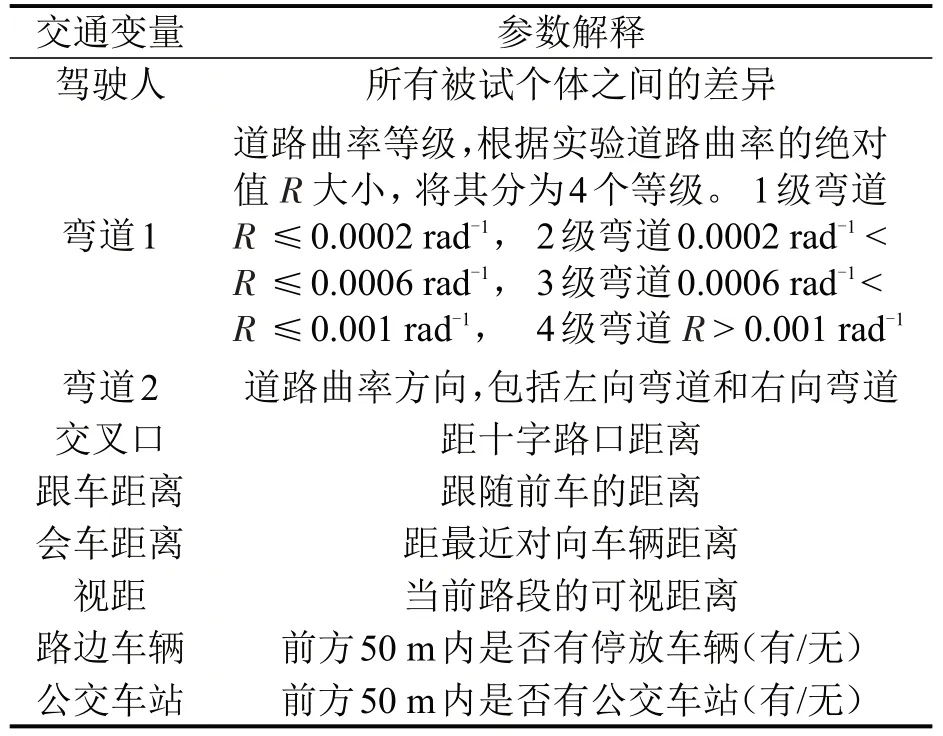
表1 9个交通变量Table 1 Descriptions of 9 selected variables
设条件概率P(Y=1|x)=p为各个交通变量相对于视线遮挡发生的概率。逻辑回归模型可表示为

式中:g(x)=β0+β1x1+β2x2+…+β8x8;xi为各个交通变量;βi为对应的回归系数。
定义视线不遮挡的条件概率为

那么,视线遮挡与不遮挡的概率之比为

这个比值称为视线遮挡的发生比,记为Odds。

那么视线遮挡的发生比率(Odds Ration),即优势比
对于连续自变量x,如交叉口、跟车距离、会车距离等,每增加一个单位,则发生视线遮挡的比率为
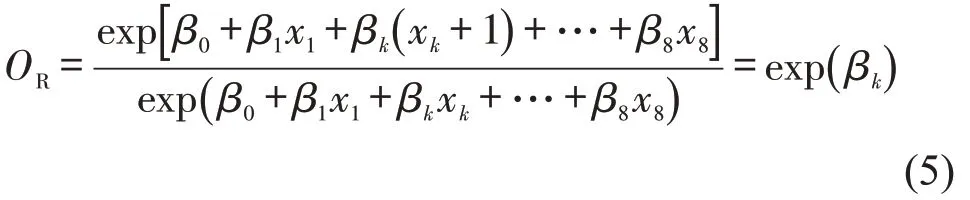
对于二分类自变量x,如弯道2、路边车辆、公交车站的取值只能为0 或1,称为虚拟变量。当选择xk=0 作为参考值时,xk=1 所对应的视线遮挡发生比率为exp(βk)。
对于多分类自变量,如弯道1、视距包括m个类别,选取一个参照类,则需要建立m-1 个虚拟变量。设虚拟变量为xk,其系数为βk,则每个虚拟变量相对于参照类,其视线遮挡发生的比率为exp(βk)。
采用逐步逻辑回归模型对所选9 个交通变量的主效应进行分析并建立回归模型。每次引入对视线遮挡影响最显著的交通变量,并对方程中之前的交通变量逐个进行检验,把变为不显著的交通变量从方程中剔除。
鉴于驾驶人在通过十字路口过程中的视线遮挡概率接近于0,假如将所有数据作为一个整体进行分析,则必然混淆其他交通变量对注意力需求的影响。为此,将实验数据分为没有十字路口和接近十字路口两部分,并分别构建回归模型,结果如表2所示。模型中变量的排列顺序表示其在模型中的可解释度高低。
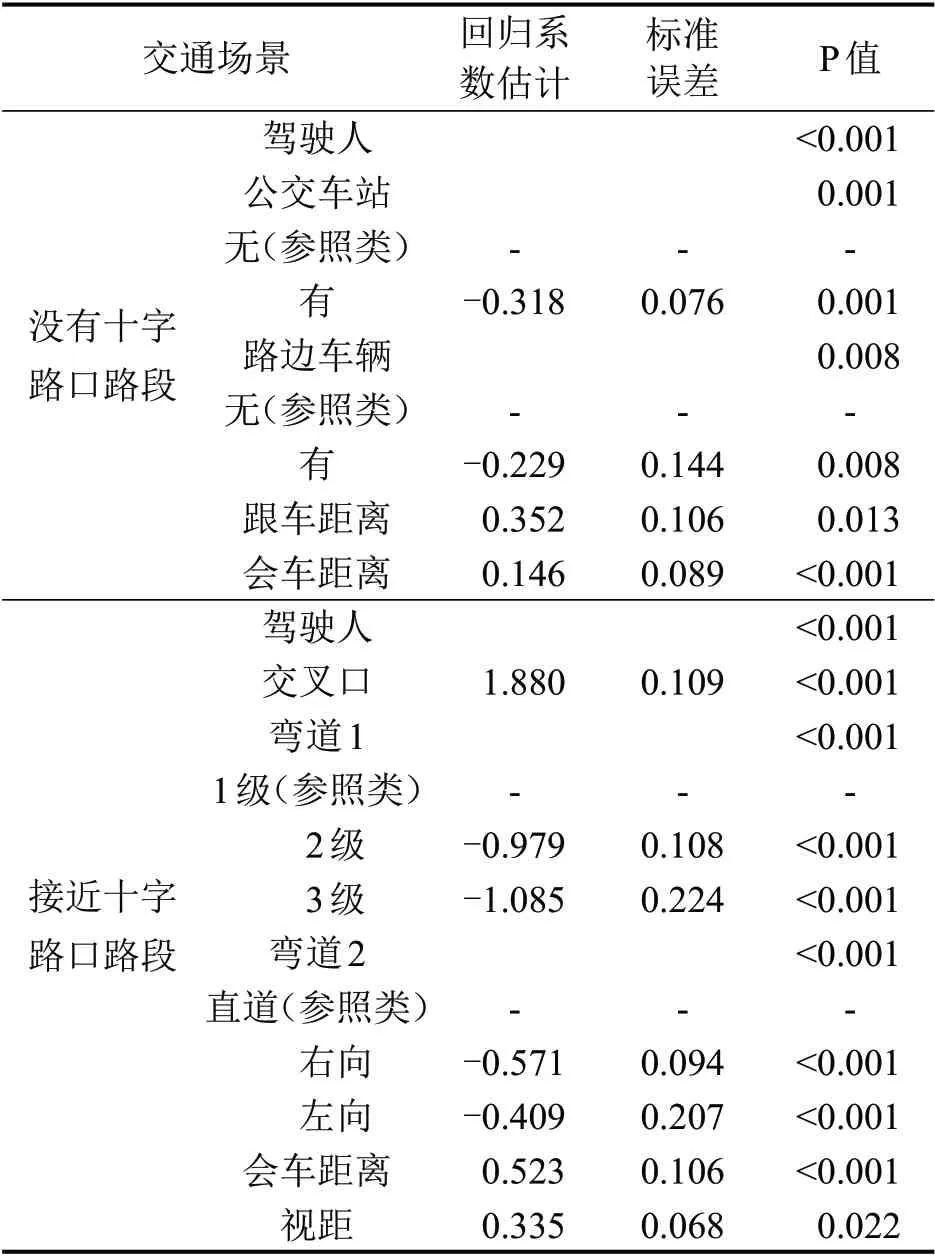
表2 两种场景下的逻辑回归模型结果Table 2 Results of logistic regression models for two scenarios
在2 个回归模型中,驾驶人的解释度均为最高,可以推测不同被试对交通场景的理解不同。此结果与Kujala 等[1]的描述基本相符,这可能与被试的性格因素或驾驶经验有关。鉴于本文主要研究非人为交通变量如何影响驾驶注意力需求,故没有对被试个体因素进一步研究。在没有十字路口的路段,公交车站、路边车辆和跟车距离是影响驾驶人遮挡视线行为较为显著的因素。而在接近十字路口的路段内,被试需要频繁的关注十字路口左右的交通信息,这可能是因为十字路口的交通信息较难预测。另外,弯道1(弯道曲率)、弯道2(弯道方向)和会车距离也会影响驾驶注意力需求。
在没有十字路口的路段,进一步对显著影响驾驶注意力需求的各交通变量进行优势比分析,如图2所示。路边有公交车站和无公交车站的优势比小于1,说明周围道路存在公交车站时,被试会减少视线遮挡,这可能是因为公交车站内存在行人突然出现或公交车突然启动的可能性,在一定程度上降低了当前交通场景的可预测性。跟车距离和会车距离属于连续型变量,其优势比的计算采用各等级间比值的相对值,即当自车与前车的距离和距对向车辆距离增加一个单位(此处选择20 m)时,定为一个等级。可以看出,跟车距离越近,距对向车辆越近,视线遮挡概率越小,驾驶注意力需求越高。
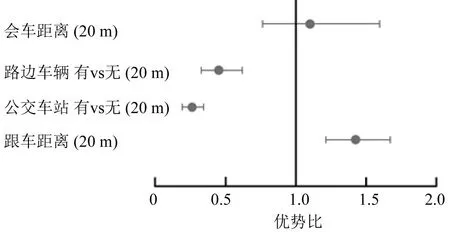
图2 没有十字路口路段逻辑回归模型中的优势比Fig.2 Odds ratio in logistic regression model for road section without intersection
对十字路口前200 m 路段内的数据进行优势比分析,如图3所示。结果显示,距离十字路口越近,视线遮挡概率越低。被试在右向弯道和左向弯道路段的视线遮挡概率小于直线路段行驶的遮挡概率,并且弯道曲率越大,遮挡概率越小。说明弯道路段对驾驶注意力需求相对直线路段更高,且弯道半径越小,对驾驶注意力需求越高。左向弯道和右向弯道之间的优势比没有显著差异,说明弯道方向对驾驶注意力需求没有影响。将会车距离按照20 m一个等级进行划分,计算各等级间的优势比。结果显示,距离对向车辆越远,视线遮挡概率相对越大。这可能是因为在会车过程中,驾驶人根据两车之间的相对距离评估驾驶风险。距离越近,风险相对越高,对驾驶注意力需求也越高。
3.3 十字路口分析
图4为驾驶人通过十字路口过程中的视线遮挡概率变化曲线。可以看出,驾驶人的视线遮挡概率从距离十字路口约150 m 处随两者之间相对距离的缩短而降低,直至行驶至十字路口前25 m处,之后又随两者之间相对距离的缩短而增加。在所有5 种遮挡时长驾驶状态下均存在这种变化趋势。这可能是因为十字路口交通环境复杂,不确定性较大,驾驶人接近十字路口前需要不间断地观察当前场景信息,并预测各个交通变量的变换趋势。而当驾驶人进入十字路口时已明确获取前方场景信息,不需要过多观察当前场景信息时,可能会遮挡前方视线。间接说明驾驶人在获取交通场景信息时,还不断预测周围环境变化。
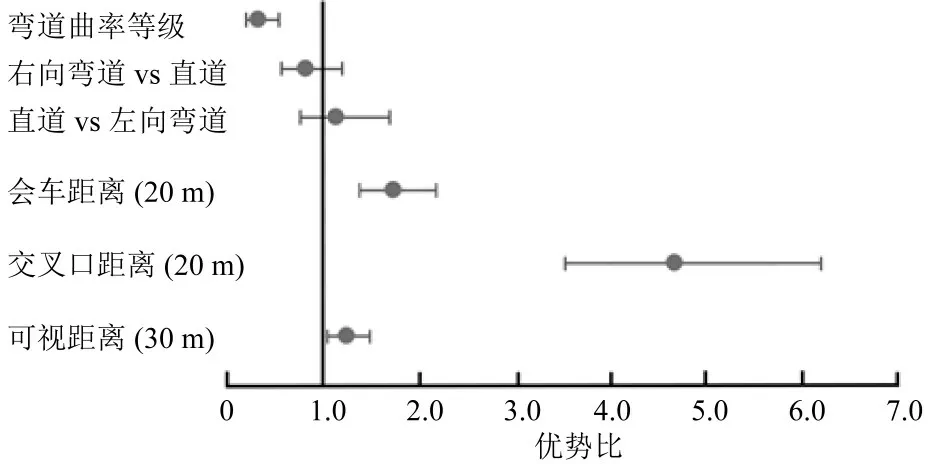
图3 接近十字路口路段逻辑回归模型中的优势比Fig.3 Odds ratio in logistic regression model for road section approaching an intersection
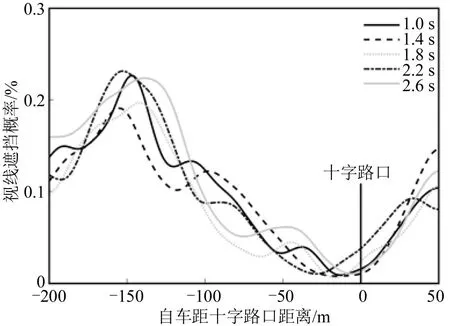
图4 通过十字路口过程中视线遮挡概率变化趋势Fig.4 Occlusion probability as a function of distance to intersection per occlusion duration
4 结论
(1)基于逐步逻辑回归模型,构建交通变量对驾驶注意力需求影响因素模型。结果显示,十字路口、路边停放车辆、公交车站、对向车辆和弯道分别是影响城市道路上驾驶注意力需求的最显著因素。
(2)驾驶车辆距离十字路口越近,道路曲率半径越小,对驾驶注意力需求越高;路边存在公交车站、停放车辆、较近的跟车距离和较近的会车距离都会增加驾驶注意力需求。
(3)驾驶人会根据当前场景信息和各个交通变量特征,有选择的获取与当前驾驶有关的交通变量信息,并预测各个交通变量的发展趋势,保持较好的环境感知力。
本文研究方法和结果对于提升行车安全性具有一定的理论意义。但模拟器实验缺乏真实的危险体验,且被试数量较少,所得结果缺乏绝对真实性。另外,利用逻辑回归模型所构建的解释性模型是否适用于其他数据库,有待进一步招募更多驾驶人进行实车实验验证。
猜你喜欢
工会博览(2022年5期)2022-06-30
小雪花·成长指南(2022年1期)2022-04-09
特区文学·诗(2021年6期)2021-12-22
中国交通信息化(2021年2期)2021-07-22
建材发展导向(2019年11期)2019-08-24
金色少年(奇趣科普)(2017年11期)2017-11-28
传媒评论(2017年3期)2017-06-13
第二课堂(课外活动版)(2016年2期)2016-10-21
当代贵州(2015年19期)2015-06-13