
火箭炮弹箱遥操作吊装技术研究
2021-03-05 14:03姜孝旺张建新
兵器装备工程学报 2021年2期
姜孝旺,张建新
(湖北江山重工有限责任公司, 湖北 襄阳 441057)
为了提升弹药装填效率,新研制火箭炮基本都采用模块化贮运发箱式技术[1-2]。贮运发箱弹药的装填是火箭炮作战使用流程中的重要一环,一定程度上决定了作战效率和可持续性[3]。然而现阶段的弹药装填技术还是比较落后,基本是人工指挥、手工定位装夹,通常需要5人组成的炮班联合操作,效率低、劳动强度大,而且不利于将来炮班人员的精简。
未来的战场少人化甚至无人化将是发展趋势[4-6],如何在人数很少(1~2人)或无人的情况下完成弹箱的再装填将是需要研究解决的难题。考虑到军用装备通常需在多种恶劣环境(如强电磁干扰)下工作,且对安全性的极高要求,在更可靠的人工智能技术出现之前,遥操作手段将是更好的选择[7-9]。针对这一关键需求,运用机器人视觉技术和基于Kinect手势控制技术对火箭炮弹箱遥操作吊装技术进行研究。
1 基于Kinect的手势控制遥操作吊装方案
基于Kinect的手势控制遥操作吊装方案主要包括两方面的研究内容:
一是基于Kinect的动态手势识别和控制研究。Kinect是由深度传感器、RGB摄像头和多点麦克风阵列组成的三维体感摄像头,能够实时获取场景图像和捕捉语音或者动作输入等信息。本文针对动态手势识别进行研究,实现通过人体的不同手势对吊臂进行控制。通过对手势识别系统上位机软件的设计,将Kinect传感器识别的手势转换为控制指令,通过有线或无线通信模块实现对吊装系统的控制,其控制原理如图1,遥操作吊装程序流程如图2。

图1 基于Kinect的手势遥控制操作原理框图

图2 基于Kinect的手势控制遥操作吊装程序流程框图
二是适合遥操作的吊装系统设计研究。通常情况,火箭炮弹箱特征在其生产定型后就已固定,一个型号火箭炮能装载的弹箱类型也是确定的,其外形为箱状,含弹运发箱重量2吨~5吨。为了吊装稳定,一般需要在箱体重心两侧夹板外侧设置起吊点。要使吊具能够可靠吊装弹箱涉及到两个关键点,一是吊具能够与弹箱准确定位对接;二是吊具能够自动夹紧弹箱,到目标位后,能够自动放下弹箱,无需任何人工干预,且安全可靠。
2 基于Kinect手势控制算法
基于Kinect手势控制算法包含手势识别和手势跟踪两部分。由于本方案采用的吊装吊具,不需要进行手势的抓取控制,只需进行机械臂末端位置的控制,本文采用Kinect稍简单的骨骼追踪算法,通过识别与追踪人体左手骨骼完成遥操作控制,其中仿射变换算法是一种常用的骨骼追踪算法。
对于三维空间中的点p,设其初始坐标P=(Px,Pv,Pz, 1)T,经过仿射变换后的坐标为Q=(Qx,Qv,Qz, 1)T,仿射变换矩阵M。平移变换的仿射变换矩阵如式(1)所示、缩放变换的仿射变换矩阵如式(2)所示、剪切变换的仿射变换矩阵如式(3)所示。

(1)

(2)

(3)
旋转变换的仿射变换矩阵如式(4)所示。
(4)
平移变换后Q=(Px+a,Pv+b,Pz+c,1)T,表示点p在x、y、z三轴上各移动了a、b、c个单位距离;缩放变换后Q=(aPx,bPv,cPz),表示点p在x、y、z三轴上各缩放了a、b、c倍大小;剪切变换后Q=(Px,Pv+bPz,cPz,1)T,表示点p在y轴的坐标;旋转变换后,点p在x、y、z三轴上依次旋转α、β、γ角。
只要求出模型的仿射变换矩阵,就可以将模型中的顶点变换到目标位置。通过求解形变图中每个顶点的仿射变换矩阵,将形变图顶点移动到目标位置,再利用形变图顶点和原模型中的顶点之间的近邻关系,求解原模型中顶点移动后的位置,模型中每个顶点的形变都是一种仿射变换。
3 适合遥操作吊装的吊具设计
3.1 原理与结构介绍
设计原理:在箱体外侧装夹,采用剪叉原理,机构联动,使定位锥销、吊钩、起吊横杆连为一体,在重力作用下,越拉越紧。采用棘爪、固定块、活动块结构,通过三者的联合使用,实现吊钩的的自动夹紧和松开。方案示意图如图3。
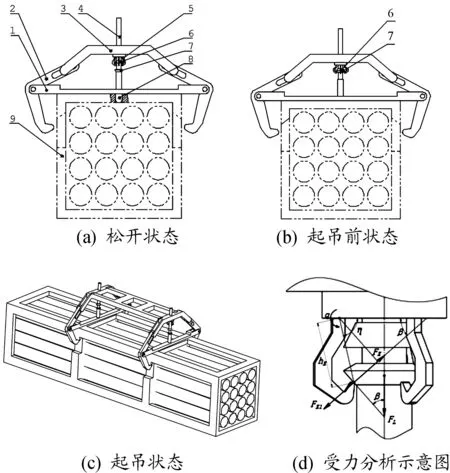
1-横杆;2-吊钩;3-起吊横杆;4-立柱;5-棘爪;6-固定块;7-活动块;8-锥销;9-运发箱
运发箱自动吊装装置主要由横杆1、吊钩2、起吊横杆3、立柱4、棘爪5、固定块6、活动块7、锥销8组成。其中,横杆1两侧设有对称的与其铰接的吊钩2,中间上部固连有立柱4,下部固连有锥销8。
吊钩2上部有槽孔,与起吊横杆3两端的销柱配合;起吊横杆3连同固连在其中间的棘爪5,可沿立柱4上下移动,棘爪5为弹性件,只能提供很小的夹紧力。
固定块6固连在立柱4上,活动块7可在固定块6和立柱4的台阶中间沿立柱4上下移动。
固定块6的下端内侧具有与棘爪5末端相配合的圆锥台形空腔,活动块7的下端为倒圆锥台形,两者配合后,在横杆1、吊钩2、立柱4重力作用下,棘爪5末端便会打滑越过固定块6。
起吊横杆3在立柱4上的滑动受棘爪5的限制,而棘爪5的上下位置最终是通过活动块7的上下移动决定,由此实现整个吊装装置的自动夹紧与松开。
3.2 具体实施方式
图3(a)为松开状态。此时,棘爪5末端钩住固定块6,吊钩2处于张开状态,整个吊装装置在机械臂的自动控制下,锥销8插入运发箱9的圆孔。
图3(b)为起吊前状态。在(a)状态下,起吊横杆3在机械臂作用下继续下移,棘爪5跟着下移并夹住活动块7,棘爪5提起活动块7沿立柱上移至固定块6处。
图3(c)为起吊状态,在(b)状态下,起吊横杆3继续上移,棘爪5无法承受横杆1、吊钩2、立柱4的重力而打滑,从而越过固定块6,起吊横杆3两端的销柱拉动吊钩2,吊钩2下端挂钩便绕铰接轴内转挂住运发箱9的起吊挂钩,而同时活动块7自由滑落到立柱4的台阶处。
当吊至目标位后,起吊横杆3在机械臂作用下下移越过固定块6,起吊横杆3两端的销柱带动吊钩2绕铰接轴外转而松开,再上移起吊横杆3,此时,棘爪5末端钩住固定块6,继续上移起吊横杆3,便可带动整个装置脱离运发箱。
3.3 计算分析
该机构实际上是将起吊横杆的竖直运动转化为吊钩的绕铰接轴的转动,通过棘爪、活动块、固定块三者的关系进行不同位置转换,最终达到吊钩松开和夹紧弹箱的功能,其核心在于棘爪夹紧力的控制以及吊钩夹紧与起吊动作的可靠性。现分析影响棘爪和吊钩性能的主要参数,为不同弹箱的吊具设计提供理论依据。
3.3.1棘爪扭矩分析
起吊时棘爪要夹住并提起活动块;当活动块与固定块接触配合后,棘爪在横杆、立柱、吊钩等部分的重力作用下张开而越过固定块,使吊钩夹紧弹箱。为使吊具正常工作,棘爪夹紧力的控制至关重要,也即控制棘爪扭矩。棘爪扭矩与活动块的下锥度大小存在一定的对应关系,如3.1节图3(d)所示,具体推导如下。其中:q为棘爪扭矩,hz为棘爪对活动块作用点与回转中心的距离,η为棘爪作用线初始角度,β为活动块圆锥半顶角(锥度为2tanβ),Fz为棘爪对活动块作用力,Fz1为活动块对棘爪的反作用力。
如3.1节图3(b)起吊前状态所示,为完成棘爪提起活动块沿立柱上移至固定块处的动作,需要使该过程中棘爪对活动块的作用力大于活动块的重力,故要满足下式
G活动块<3Fzsinβ
如3.1节图3(c)起吊状态所示,为使棘爪越过固定块,需要使该过程中棘爪对活动块的作用力小于固定块、活动块、立柱、横杆和吊钩的重力(不计摩擦),以便吊钩夹紧弹箱。故要满足下式
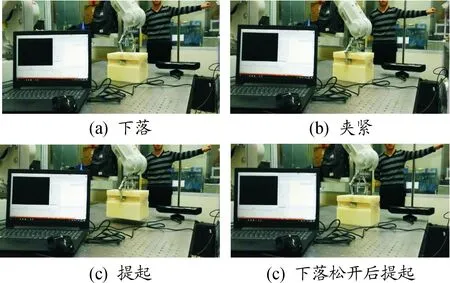
3Fzsinβ G活动块+G固定块+G立柱+G横杆+2G吊钩 理想状况下只需控制棘爪扭矩大于最小扭矩,该机构即可实现功能,且扭矩越小,棘爪与活动块和固定块的摩擦力越小,棘爪寿命越长。但实际工况会伴随振动和过载,为留有安全余量,同时考虑到棘爪扭簧制造难度,建议取棘爪扭矩为100 N·mm。 3.3.2吊钩转角相关的定量关系 起吊横杆的竖直运动使吊钩旋转一定角度,从而改变吊钩底端横向位移,实现夹紧与松开,故起吊横杆垂直位移e、吊钩转角θ、吊钩底端横向位移L(如图4所示)之间的关系较为关键。其中:h0为销柱初始高度,h1为吊钩底端初始高度,e为起吊横杆垂直位移,L为吊钩底端横向位移,L1为吊钩上部长度,L2为吊钩下部长度,θ2为吊钩上部初始角度,θ1为吊钩下部初始角度,θ为吊钩转角。 起吊横杆垂直位移e与吊钩转角θ的关系为 即e=L2sinθ2-tan(θ2-θ)·L2cosθ2 吊钩底端横向位移L与吊钩转角θ的关系为 L=L1cosθ1-L1cos(θ1+θ) 吊钩底端横向位移L与起吊横杆垂直位移e的关系为 图4 转角相关的定量关系示意图 根据某产品运发箱的尺寸及重量,制作了1:5缩比吊具及运发箱模型(适应实验室机器人承载能力),利用Kinect相机机器骨骼识别算法,通过识别与追踪人体手掌骨骼坐标,实时控制机械臂位置,从而进行吊具的遥操作无人吊装作业,用以验证实际吊装效果,试验平台如图5所示。试验方法流程如图6所示,试验结果如图7所示。 从试验验证结果来看,该吊具原理可行,动作可靠,完全可以满足无人化操作要求。 图5 试验平台 图6 试验验证流程框图 图7 试验结果 根据火箭炮弹箱结构特点设计一种适合无人操作的专用吊具;通过Kinect传感器识别手掌骨骼动作信息,将识别的动作信息转化为指令信息,控制机器人机械臂进行吊装动作。利用实验室ABB机械臂和Kinect相机进行了遥操作控制试验,结果表明该原理是可行的,为火箭炮的少人化和无人化做出技术储备。 下一步将继续进行弹箱识别、定位、起吊系列试验,并在控制鲁棒性和实时性及提高工作效率方面进行深入研究。


4 实验


5 结论
猜你喜欢
矿山机械(2022年5期)2022-05-19
集装箱化(2021年5期)2021-08-03
作文周刊·小学五年级版(2021年28期)2021-03-16
集装箱化(2020年10期)2020-12-21
装备维修技术(2020年3期)2020-11-20
建筑与装饰(2020年17期)2020-10-20
集装箱化(2020年5期)2020-07-26
记者观察(2019年1期)2019-04-04
小猕猴智力画刊(2016年12期)2017-01-05
阅读与作文(小学高年级版)(2016年10期)2016-10-12
