
DJI精灵4RTK免像控的误差较大原因及分析
2021-03-07 12:17赵卫国庞震
家园·建筑与设计 2021年18期
赵卫国 庞震
摘要:DJI 精灵4RTK是2018年8月发布的DJI迈向测绘行业的第一款专业设备,由于低廉的价格,在测绘无人机行业极大的降低了航空摄影测量门槛,又由于完善的维修服务方式,彻底改变了原无人机摄影测量系统高价,维修成本高的现状,为推动航空摄影测量做出了巨大的贡献。但是,通过我公司近四年的使用,我们发现,该无人机设备在实际使用过程中,其精度无法满足免像控。
关键词:DJI 精灵4RTK;免像控
引言
在航空摄影测量的众多产品中,我们会常见对地面分辨率及航高的对应表达,来描述无人机摄影测量系统的精度。
1无人机地面分辨率在精度上的影响因素
1.1相机分辨率及航高对精度的影响
影响航测相机的采集精度的主要因素为:畸变与测量方式。
畸变只能尽可能缩小,不存在完全消除,常见的评定方式为畸变不超过3%,我们就可以认为是已经满足航测软件的要求。
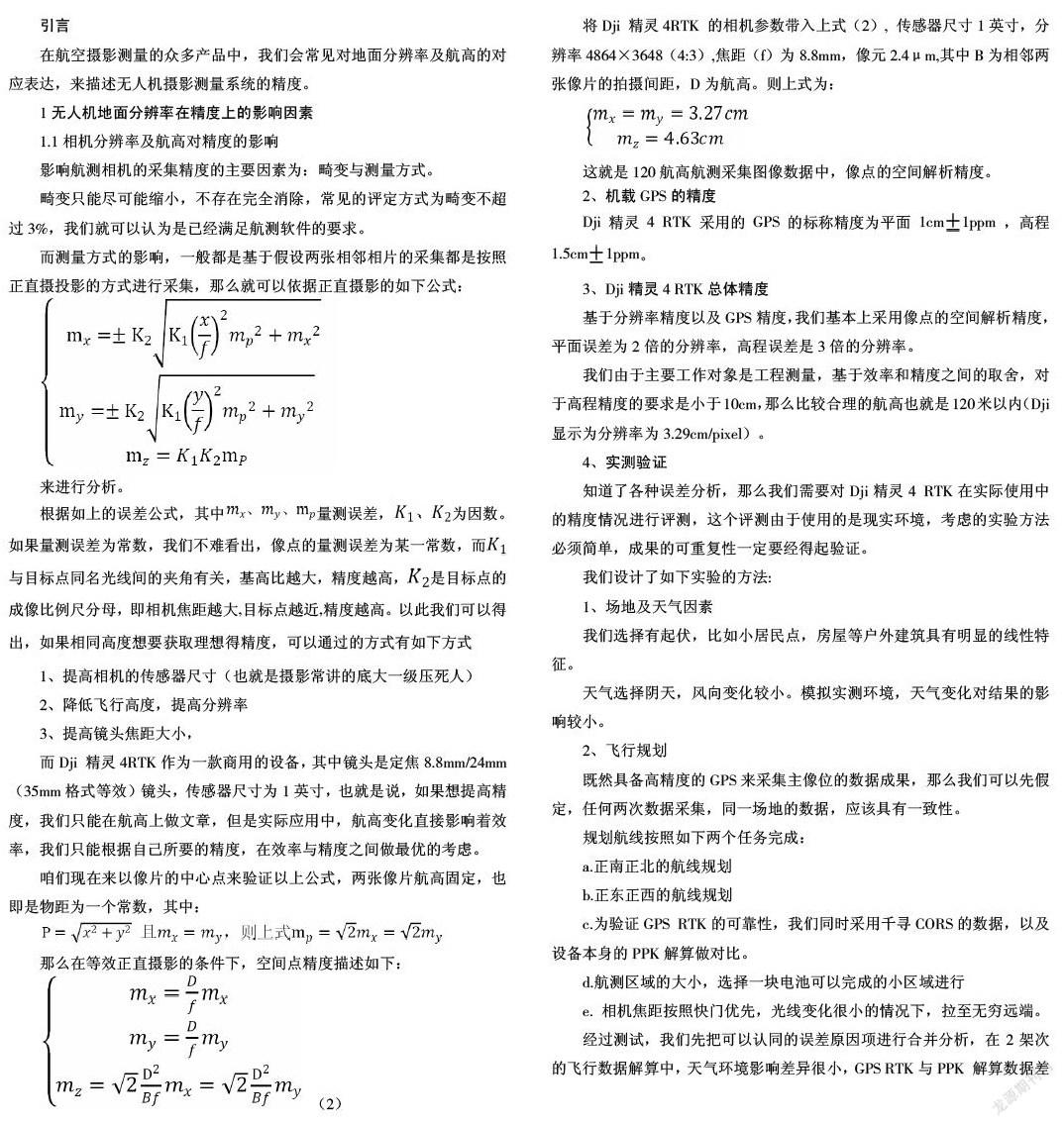
而测量方式的影响,一般都是基于假设两张相邻相片的采集都是按照正直摄投影的方式进行采集,那么就可以依据正直摄影的如下公式:
根据如上的误差公式,其中 量测误差, 为因数。如果量测误差为常数,我们不难看出,像点的量测误差为某一常数,而 与目标点同名光线间的夹角有关,基高比越大,精度越高, 是目标点的成像比例尺分母,即相机焦距越大,目标点越近,精度越高。以此我们可以得出,如果相同高度想要获取理想得精度,可以通过的方式有如下方式
1、提高相机的传感器尺寸(也就是摄影常讲的底大一级压死人)
2、降低飞行高度,提高分辨率
3、提高镜头焦距大小,
而Dji 精灵4RTK作为一款商用的设备,其中镜头是定焦8.8mm/24mm(35mm格式等效)镜头,传感器尺寸为1英寸,也就是说,如果想提高精度,我们只能在航高上做文章,但是实际应用中,航高变化直接影响着效率,我们只能根据自己所要的精度,在效率与精度之间做最优的考虑。
咱们现在来以像片的中心点来验证以上公式,两张像片航高固定,也即是物距为一个常数,其中:
这就是120航高航测采集图像数据中,像点的空间解析精度。
2、机载GPS的精度
Dji精灵4 RTK 采用的GPS的标称精度为平面1cm 1ppm ,高程1.5cm 1ppm。
3、Dji精灵4 RTK总体精度
基于分辨率精度以及GPS精度,我们基本上采用像点的空间解析精度,平面误差为2倍的分辨率,高程误差是3倍的分辨率。
我们由于主要工作对象是工程测量,基于效率和精度之间的取舍,对于高程精度的要求是小于10cm,那么比较合理的航高也就是120米以内(Dji显示为分辨率为3.29cm/pixel)。
4、实测验证
知道了各种误差分析,那么我们需要对Dji精灵4 RTK在实际使用中的精度情况进行评测,这个评测由于使用的是现实环境,考虑的实验方法必须简单,成果的可重复性一定要经得起验证。
我们设计了如下实验的方法:
1、场地及天气因素
我们选择有起伏,比如小居民点,房屋等户外建筑具有明显的线性特征。
天气选择阴天,风向变化较小。模拟实测环境,天气变化对结果的影响较小。
2、飞行规划
既然具备高精度的GPS来采集主像位的數据成果,那么我们可以先假定,任何两次数据采集,同一场地的数据,应该具有一致性。
规划航线按照如下两个任务完成:
a.正南正北的航线规划
b.正东正西的航线规划
c.为验证GPS RTK的可靠性,我们同时采用千寻CORS的数据,以及设备本身的PPK解算做对比。
d.航测区域的大小,选择一块电池可以完成的小区域进行
e. 相机焦距按照快门优先,光线变化很小的情况下,拉至无穷远端。
经过测试,我们先把可以认同的误差原因项进行合并分析,在2架次的飞行数据解算中,天气环境影响差异很小,GPS RTK与PPK 解算数据差异很小,地面分辨率差异很小,相机焦距按照快门优先,光线变化很小的情况下,拉至无穷远端,相机的影响因素也可以忽略,也就是去掉各种外在的影响,现在2个架次任务之间的外在影响均不需考虑,只需要考虑设备本身内在的各种误差了。那么重点来了,这两个架次数据经过同一软件的处理,同一点位的空间解析数据相互之间是否存在差异,设备的自洽能力,就成了主要因素。
采用软件为PIX4D,用时几乎相当,飞行中航向及旁向重叠率均考虑按照75%来考虑,像片数量略有差异,但对解算时长来说,差异不大!
所有解算结果加入该区域的七参数,以确保两个架次得到的当地坐标系数据,都能真实准确的反映出实际飞行中采集POS数据。
解算出点云数据(*.Las),将las数据导入纬地道路设计软件,建立地面数据模型,根据划定的道路中线,提取不同的纵断面、横断面数据作为对比。
同一道路,基于不同架次飞行采集的数据,提取的纵断面数据从30-60cm,无明显规律。
该数据对比反映出,同一位置,不同架次,数据之间,不具备重复性,因而,我们判定Dji精灵4 RTK,在120米航高的情况下,无法满足免像控的要求。
原因分析
1、相机畸变参数的影响
相机畸变的影响只能减小不可能消除,基本各种软件对畸变参数的要求,基本上都在3%以内,可以认同为相机畸变参数正常。该参数伴随着使用环境,气候,光线变化,景深等,都具有可变性,单纯理解靠修改畸变参数解决Dji精灵4 RTK精度问题,是不具备现实意义的方法。
2、GPS RTK 精度的影响
DJI宣称毫秒级快门,那么就只剩下机载的GPS设备误差这一原因啦!
但是要证明这个设备的GPS有问题,我们尝试了很多办法,譬如:
1、设置旋转圆盘,让无人机相机垂直向下,旋转中心与相机的镜头中心一致,来定时拍摄,存取GPS数据以检查其位移,但是空中姿态,远远没有这样平稳,而且振动也不在一个层级上,所以以失败告终。
2、想通过在镜头信号线端与GPS数据采集端之间,安装逻辑分析仪,以确定拍照时刻,两者的同步性,由于飞机形体太小,内部空间有限,无法将这些设备携带到空中,也告以失败。我们发现,造成这一原因的结果只有一个,那就是Dji精灵4 RTK的GPS设备,在空中姿态下的数据采集存在问题。
该检测的主要思路延续了上面详述的检测方式,就是同一设备,在几乎同等的条件下,南北向规划航线采集的影像数据与东西向规划航线采集的数据应具有一致性,也就是首先需要达成的是设备能自圆其说,然后才具备精度一致性。
所以,我们公司的结论是:如果咱们把免像控的精度对应到,实际平面坐标在5cm,高程在10cm的具体数值上,那么可以肯定的说,DJI 精灵4 RTK 是无法满足免像控条件的。
(以上结论均有实测数据支持,如有需要请联系:928925819@qq.com)
参考文献
[1] 张剑清 潘励 王树根. 摄影测量学 (第二版)作者:张剑清潘励王树根,出版社:武汉大学出版社, ISBN:9787307069558
3385500589259
