自由设站边角同测交会法在矿山测量中的应用及C#程序编制
2021-03-07 02:42闫朋远赵晓举林文明
矿山测量 2021年1期
闫朋远,赵晓举,林文明
(平顶山天安煤业股份有限公司二矿,河南 平顶山 467000)
矿山测量受作业场所限制,往往在井下狭长的井巷中开展,通视条件较差,一旦某个控制点被损坏,就可能造成剩余控制点不通视,传统的测量方法将无法继续进行坐标传递。为解决此问题,常采用交会测量[1]。然而传统的交会测量不仅计算公式、精度评定复杂,且在仅有两个不通视控制点的情况下同样不适用。本文结合井下现场实际,利用自由设站法[2-3],选取与前后控制点均通视的位置自由架设全站仪,采用边角交会的测量方法[4],通过三角函数及坐标的正反算计算出待定点坐标。
1 自由设站边角同测交会法测量的理论基础
交会测量是一种常用的控制测量方法,传统意义上交会测量分为前方交会、后方交会。早期受边长测量精度远低于角度测量精度的限制,前方交会与后方交会只观测角度,然后采用对应的交会计算公式,计算待定点坐标,计算公式与精度评定较复杂。随着测距仪器精度的提高,以及井下测量条件的限制,采用自由设站边角同测的交会方法进行特殊条件下的控制测量,更具有可操作性。
1.1 自由设站边角同测交会法
假设井下巷道有已知点A与已知点B,两点不通视,为了进行下一步控制测量,选择一处既能与A通视又能与B通视的地点,设置待定点P,如图1所示。

图1 自由设站边角同测交会法
在待定点P处架设全站仪,测量水平角∠P,水平边长SAP、SBP,利用已知点A坐标(XA,YA)、已知点B坐标(XB,YB),采用自由设站边角同测交会法计算待定点P坐标,具体计算步骤如下。
根据正弦定理,代入∠P、SAB、SBP,计算得到∠B:
(1)
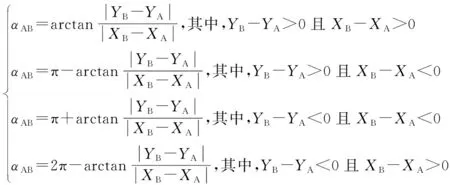
根据坐标反算[5],可以求得方位角αAB,再由方位角计算公式得到αBP:
(2)
αBP=αAB+∠B-π
(3)
将XB、YB、αBP、SBP代入坐标正算,推导出待定点P坐标(XP,YP)的自由设站边角同测交会法计算公式:
(4)
1.2 精度评定
利用中误差传播定律对自由设站边角同测交会法计算得到的待定点坐标进行精度评定[6-7]。
以观测值SAP、SBP、∠P为自变量,以SAB、αAB为已知数,对式(4)进行展开:
(5)
将式(5)分别对SAP、SBP、∠P求偏导数:
(6)
根据中误差传播定律,计算待定点P的点位中误差[8]:
(7)
将式(6)代入式(7)中,计算得到自由设站边角同测交会法中的待定点P的中误差方程:
(8)
式中,mSAP、mSBP为水平边长SAP、SBP的测边中误差;m∠P为水平角∠P的测角中误差;ρ″为常数206 265。
2 C#程序编制
2.1 算法设计
为了便于自由设站边角同测交会法的实施与计算,在提高计算效率的同时,减少人为计算错误,选择利用计算机编程,实现上述算法步骤,具体算法流程图如图2所示。
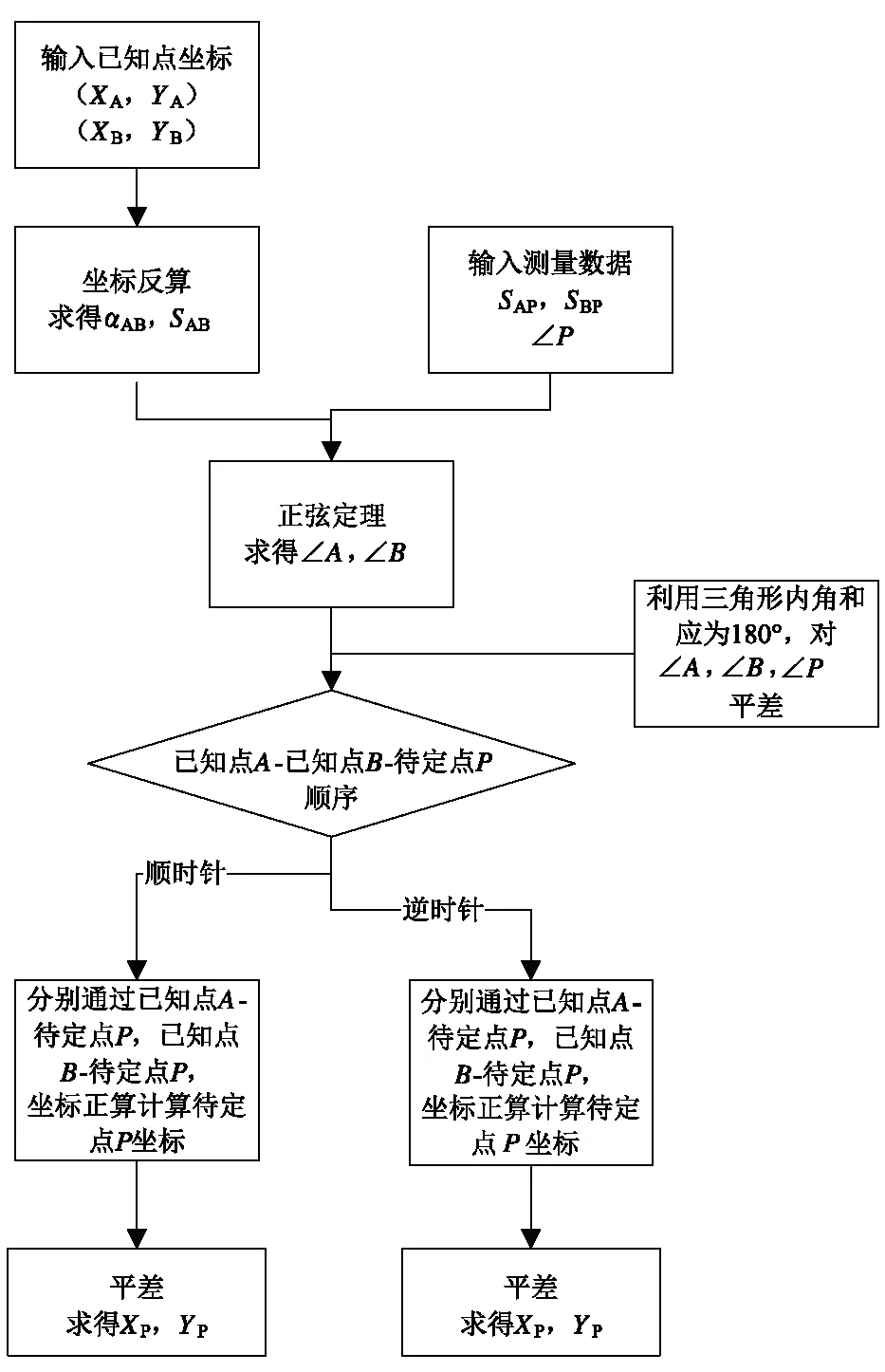
图2 自由设站边角同测交会法算法流程图
2.2 程序编制
2.2.1 窗体设计
C#是微软公司发布的一种面向对象的、运行于.NET Framework之上的高级程序设计语言,它综合了VB的可视化操作和C++的高运行效率[9]。本文利用C#良好的图形用户界面(GUI),以视窗的模式,进行交会计算,使得计算简单化、准确化,如图3所示。
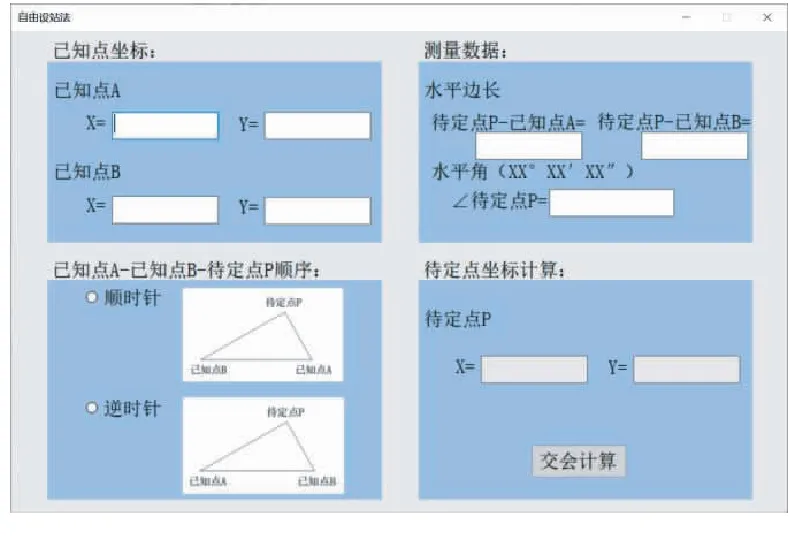
图3 自由设站边角同测交会法GUI界面
2.2.2 关键程序
(1)变量定义
doubleX1; //已知点A的X坐标
doubleY1; //已知点A的Y坐标
doubleX2; //已知点B的X坐标
doubleY2; //已知点B的Y坐标
doubleX3; //待定点P的X坐标
doubleY3; //待定点P的Y坐标
doubleS12; //已知点A-已知点B的水平边长
doubleα12; //已知点A-已知点B的方位角,单位:弧度
doubleJ1; //∠已知点A,单位:弧度
doubleJ2; //∠已知点B,单位:弧度
doubleJ3; //∠待定点P,单位:弧度
doubleS13; //水平边长:已知点A-待定点P
doubleS23; //水平边长:已知点B-待定点P
doubleα13; //已知点A-待定点P的方位角,单位:弧度
doubleα23; //已知点B-待定点P的方位角,单位:弧度
(2)坐标反算
S12 = Math.Sqrt(Math.Pow(X2 -X1, 2) + Math.Pow(Y2 -Y1, 2));
double temp12= Math.Atan(Math.Abs(Y2 -Y1) /Math.Abs (X2 -X1));
if ((Y2 -Y1) > 0 && (X2 -X1) > 0)
α12 = temp12;
else if ((Y2 -Y1) > 0 && (X2 -X1) < 0)
α12 = Math.PI - temp12;
else if ((Y2 -Y1) < 0 && (X2 -X1) < 0)
α12 = Math.PI + temp12;
else if ((Y2 -Y1) < 0 && (X2 -X1) > 0)
α12 = 2 * Math.PI - temp12;
(3)正弦定理及内角平差
//正弦定理计算三角形各内角
J1 = Math.Asin(S23 * Math.Sin(J3) /S12);
J2 = Math.Asin(S13 * Math.Sin(J3) /S12);
//三角形内角平差
double temp = Math.PI - (J1 +J2 +J3);
double temp1 =J1 + temp / 3;
J1 = temp1;
double temp2 =J2 + temp / 3;
J2 = temp2;
double temp3 =J3 + temp / 3;
J3 = temp3;
(4)坐标正算
if (radioButton1.Checked == true) //已知点A-已知点B-待定点P顺时针
{
//利用已知点2-待定点,计算待定点坐标
α23 =α12 -J2 + Math.PI;
double dx=S23 * Math.Cos(α23);
double dy=S23 * Math.Sin(α23);
double temp1X3 =X2 + dx;
double temp1Y3 =Y2 + dy;
//利用已知点1-待定点,计算待定点坐标
α13 =α12 +J1;
dx=S13 * Math.Cos(α13);
dy=S13 * Math.Sin(α13);
double temp2X3 =X1 + dx;
double temp2Y3 =Y1 + dy;
//取平均值
X3 = (temp1X3 + temp2X3) / 2;
Y3 = (temp1Y3 + temp2Y3) / 2;
//结果输出
textBox9.Text = Convert.ToString(Math.Round(X3, 3));
textBox10.Text = Convert.ToString(Math.Round(Y3, 3));
}
else if(radioButton2.Checked==true) //已知点A-已知点B-待定点P逆时针
{
//利用已知点2-待定点,计算待定点坐标
α23 =α12 +J2 - Math.PI;
double dx=S23 * Math.Cos(α23);
double dy=S23 * Math.Sin(α23);
double temp1X3 =X2 + dx;
double temp1Y3 =Y2 + dy;
//利用已知点1-待定点,计算待定点坐标
α13 =α12 -J1;
dx=S13 * Math.Cos(α13);
dy=S13 * Math.Sin(α13);
double temp2X3 =X1 + dx;
double temp2Y3 =Y1 + dy;
//取平均值
X3 = (temp1X3 + temp2X3) / 2;
Y3 = (temp1Y3 + temp2Y3) / 2;
//结果输出
textBox9.Text = Convert.ToString(Math.Round(X3, 3));
textBox10.Text = Convert.ToString(Math.Round(Y3, 3));
}
3 工程实例
3.1 计算实例
巷道中现有A、B两个控制点,A点坐标(XA=39 593.812,YA=37 509.644),B点坐标(XB=39 544.608,YB=37 533.971),A、B两点不通视,如图4所示。
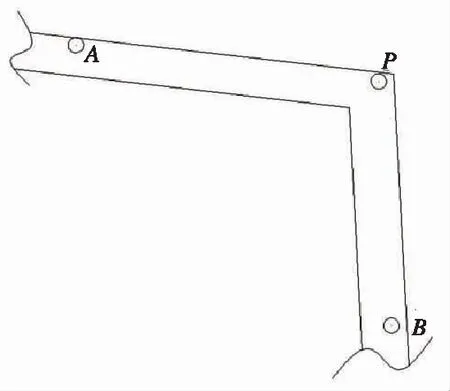
图4 工程实例
采用自由设站边角同测交会法,在与A、B两点同时通视的任意地点设置待定点P,并于P点处架设全站仪,测得水平边长SAP=39.607 m、SBP=31.856 m,水平角∠P=99°47′45″。将以上已知数据与测量数据分别输入窗口对应位置,选择“逆时针”,单击“交会计算”,就可计算得到待定点P坐标(XP=39 574.726,YP=37 544.349),如图5所示。

图5 计算实例
3.2 精度评定
通过坐标反算可得SAB=54.889 m。此次实测所选用的测量仪器为尼康2.M防爆型全站仪,测角
中误差为2″,测距中误差为2+2 ppm,因此可得:
m∠P=2″
mSAP=2+0.039 607×2=2.079 mm
mSBP=2+0.031 856×2=2.064 mm
(9)
将式(9)以及SAB、SAP、SBP、∠P,代入式(8)中计算可得:
MP=2.7 mm
经自由设站边角同测交会法计算所得的待定点P坐标点位中误差为2.7 mm。根据《工程测量规范》5.2.1条“图根点相对于邻近等级控制点的点位中误差不应大于图上0.1 mm”[10],完全满足1:100测图精度要求。
4 结 论
经实例验证与精度评定,自由设站边角同测交会法与C#程序,计算高效、结果可靠,可用于日常井巷测图与支导线延伸。但如若作为基本控制点使用,仍需进一步提高测量精度与平差。
猜你喜欢
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
小学生学习指导(中年级)(2021年10期)2021-11-01
阅读(科学探秘)(2021年10期)2021-03-08
初中生世界·九年级(2019年8期)2019-08-29
学苑创造·B版(2019年6期)2019-07-12
诗潮(2017年2期)2017-03-16
中学生数理化·高一版(2016年4期)2016-11-19
作文周刊·小学一年级版(2016年5期)2016-08-11
Coco薇(2016年7期)2016-06-28