一款轻小型化微功率微多普勒超宽带雷达探测系统的设计与实现
2021-03-08 02:32谢义方马淑香
现代电子技术 2021年5期
孙 浩 ,谢义方 ,马淑香
(1.中国科学院国家空间科学中心,北京 100190;2.中国科学院大学,北京 100049)
0 引 言
目标的运动会使雷达接收机接收到的回波信号频率相对于发射信号的频率发生偏移,这种现象称为多普勒效应。除了目标主体移动外,目标或目标上的某些部分若存在相对于目标主运动方向的机械振动或摆动,则回波信号的频率将被调制,这种现象就称为微多普勒效应。微多普勒效应从频率上体现目标微动的雷达特征,反映多普勒频移的瞬时特性,表征目标微动的瞬时径向速度[1]。
雷达探测技术在无线传感中的应用已有多年,自从微多普勒效应被发现以后,针对微动目标识别的雷达技术的研究不断取得新的进展。经过研究者们辛勤的探索,微多普勒效应在雷达中的应用已经非常广泛,包括对喷气式飞机目标的探测[2]、对行人摆臂动作的识别[3]以及对非视距环境下生命体征的监测[4⁃5]等。
相对于传统的窄带雷达,超宽带雷达具有空间分辨率高、抗多径干扰能力强、穿透能量强、平均功耗低等优点[6⁃7]。脉冲超宽带雷达采用脉冲技术,使用占空比低、宽度极窄的高频脉冲信号作为探测媒介,可以获得更大的微多普勒频移,帮助获得目标更多的物理特征[8⁃12]。本文设计了一种超宽带雷达系统,探测精度高达毫米级,在减小体积和降低功耗等方面不断优化,实现了轻小型化、微功耗的技术要求,并综合雷达系统完整性的考虑,设计了一款上位机软件,可对雷达功能参数进行灵活地配置和调整,并且可实时显示雷达回波图像和微动信息。
1 系统设计
1.1 系统总体结构
传统的雷达探测系统采用既笨重又庞大的波导器件,不便于集成到智能设备或自动化系统中[10],而随着微波与射频技术的不断发展,雷达探测的性能不但得到提升,而且信号产生与接收等功能都可以集成在一个芯片上,大大减轻了系统重量并且降低了成本。本文采用挪威Xethru 公司生产的X2 芯片作为脉冲超宽带雷达的发射和接收单元。芯片的系统结构如图1 所示。
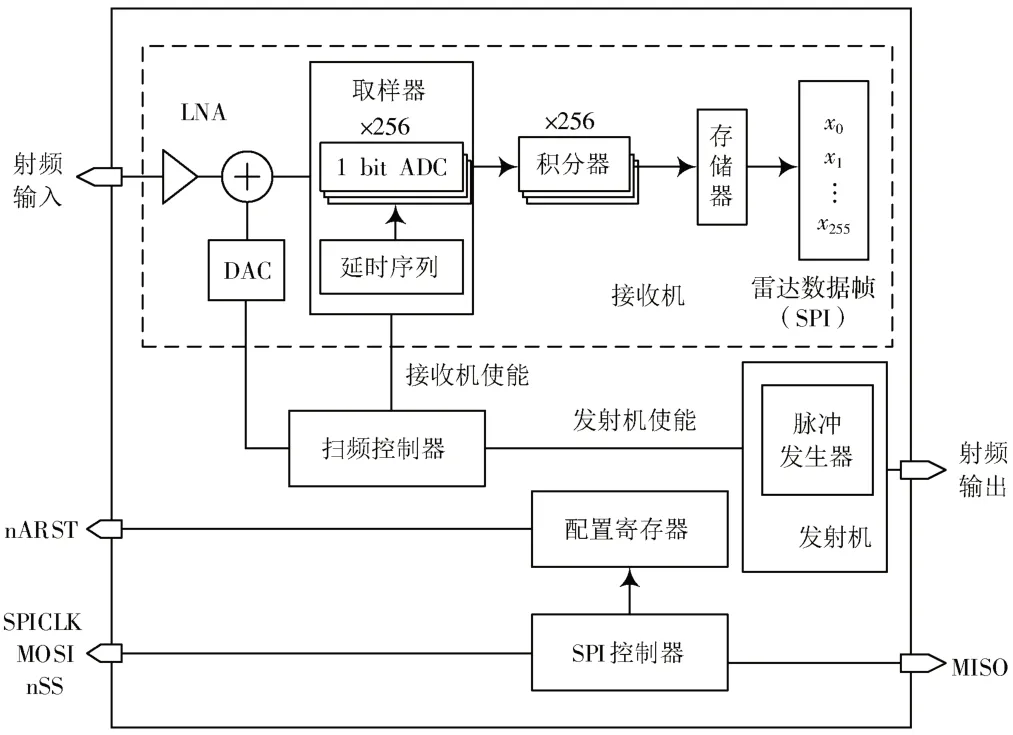
图1 X2 的系统结构图
该芯片可通过四线串行外设接口(SPI)进行配置,并具有可通过SPI 访问的存储器缓冲区,用来输出接收的回波数据。该系统的接收机包括一个低噪声放大器(LNA),一个数模转换器(DAC),256 个 1 bit 高速模数转换器(ADC)和256 个32 位数字积分器。X2 的发射机包含一个高阶高斯近似脉冲发生器,该脉冲发生器能够在6~10.2 GHz 频率范围内产生和传输高带宽脉冲,重复频率高达100 MHz。接收机采用多取样器并联延时采样的方法提高采样率,并且与发射机紧密集成,旨在对接收到的能量进行相干积分。X2 的系统功耗低至120 mW 以下,并且理论上可达毫米级的距离分辨率,符合微功耗高精度的技术要求。
本文设计的超宽带雷达系统框图,如图2 所示。
首先由主控制单元(MCU)控制和协调各个模块间的工作,由电源管理单元负责各个模块的电源供应。接收到MCU 发出的指令后,X2 产生超宽带脉冲,经发射电路处理送往发射天线辐射到空间中,辐射电磁波照射到目标后返回部分散射波,再由接收天线捕捉到。接收到的回波由接收电路处理和模数转换成为数字信号,存储到RAM 中并发送至PC 机。最终,上位机软件对雷达的接收帧数据进行数字滤波处理和图形化显示,实现对微动目标探测的目的。
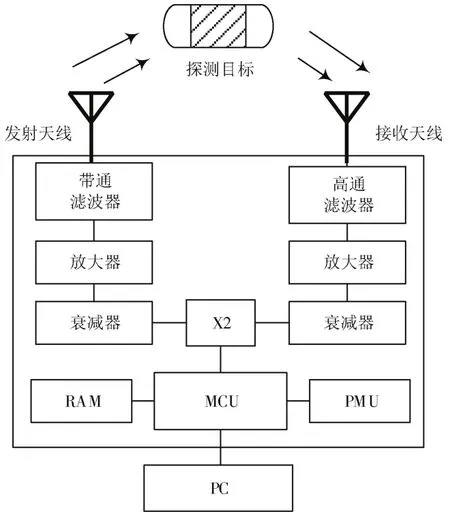
图2 系统框图
1.2 硬件电路设计
1.2.1 硬件顶层设计
本系统的硬件部分主要包括MCU、射频(RF)模块和电源(POWER)模块,在Cadence OrCAD 中的顶层设计图如图3 所示。MCU 除了连接USB 接口与I/O 扩展口外,还采用四线SPI、外部时钟和中断信号线控制RF 模块,再通过使能端以及线性时钟和数据端口控制POWER 模块。RF 模块分别通过2 个SMA 射频头发射和接收脉冲超宽带信号。
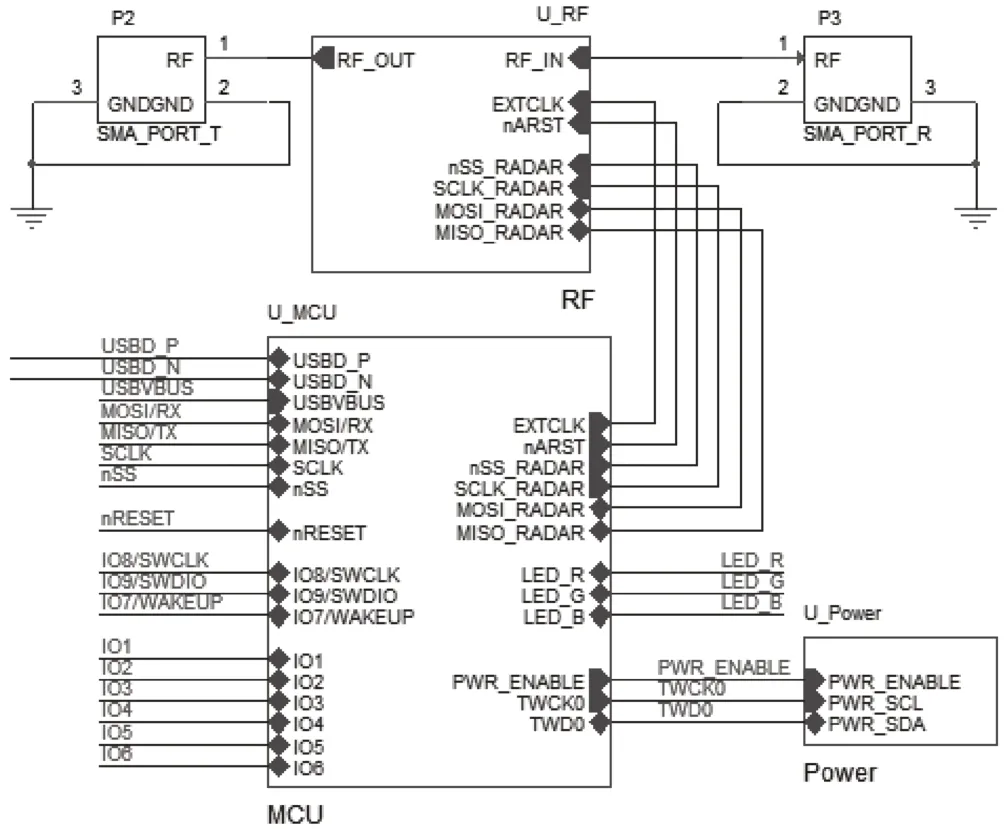
图3 硬件顶层设计
1.2.2 射频前端设计
射频前端主要包括超宽带发射模块和接收模块。在发射电路的设计中,由X2 芯片输出的射频脉冲信号先经过衰减器,再由宽带低噪放大器放大,最后经带通滤波器滤波输出,链路中分别由3 个电容做隔直处理。其中,低噪放大器选用安华高科技公司的VMMK3803,该放大器的工作频率范围是3~11 GHz,对小信号的增益有20 dB,并且芯片的长宽仅为1 mm 和0.5 mm。带通滤波器选用 Mini⁃Circuit 公司的 BFCN⁃732,工作频率范围为6.6~8 GHz,尺寸仅为2 mm×1.2 mm。
接收电路与发射电路有相似之处,都用到了VMMK3803 作为低噪放大器,不同之处在于接收链路中的滤波器选择HFCN⁃6010 作为高通滤波器,工作频率范围为6~8.5 GHz,尺寸为3.2 mm×1.6 mm。
射频前端电路选用的电子元器件尺寸非常小,大大减小了整个硬件系统的体积。
1.2.3 电源模块设计
由于系统需要为ARM、RAM、X2、放大器、滤波器等器件供电,需要多个幅值的电压供给。考虑到硬件系统的轻小型化和低功耗的要求,本设计选用TI 公司的电源管理芯片LP8725,该芯片集成了2 个高效率的DC⁃DC转换器、3 个数字 LDO、3 个低噪模拟 LDO 和 2 个 LILO 稳压器,满足本系统所需多幅值的电源供给需求。并且LP8725 可通过线性接口配置电源启动序列,便于调整各个模块的上电顺序。通过对电源管理单元外围电路的设计与调整,可实现对本系统各个器件供电的目的。
1.2.4 PCB 设计
在整个PCB 的设计中,集中对紧凑性和线宽线距这一平衡的把握,尽可能地缩小PCB 板的面积和厚度,同时也注意到扩展性的要求,实现了可集成程度高的优势。PCB成品如图4所示,尺寸为45 mm×45 mm,重量为7 g。
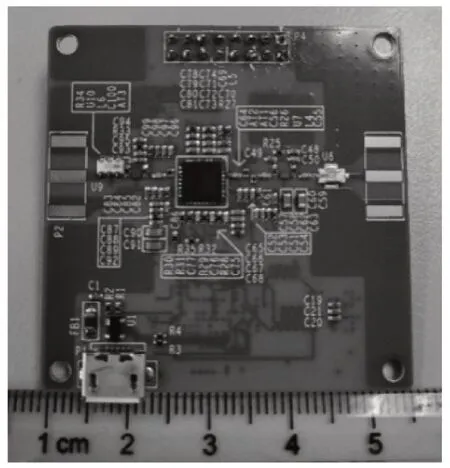
图4 电路板实物图
1.3 软件设计
1.3.1 微多普勒特征提取
目标物体的微动可对照射到该物体表面的电磁波进行频率调制,通过对接收回波频移分量的提取,实现对目标微动特征的识别。对于物体距离雷达的径向距离,可以用R(t)表示:

式中:R0为目标距雷达的初始距离;vR是目标相对雷达的径向速度;x(t)为目标或目标上的某些部分相对于目标主运动方向的机械振动或摆动的时变偏离。而对于一般的雷达发射信号来说,可以用sT表征:

式中:A(t)为发射信号的幅度;f0为发射信号的载频;φ0为初始相位。那么接收到的回波信号为:

式中:τ(t)为回波相对于发射波的延时时间;φ(t)为回波相位。此时,令回波的瞬时频率为finst,则:
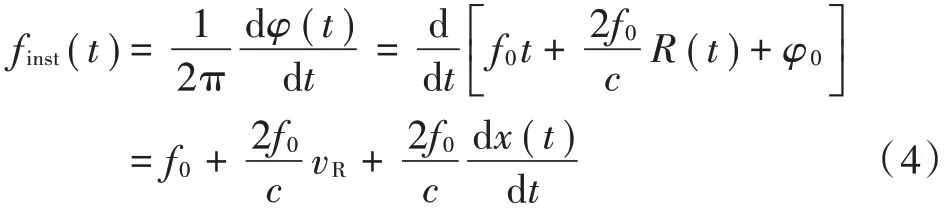
从结果中可以看出,瞬时频率被分解为载频、多普勒频移和微多普勒频移。将接收信号微多普勒频移通过数字滤波的办法提取出来,便可有效地分析和识别目标的微动特征。
1.3.2 下位机工作流程
本系统下位机由基于ARM 的智能缓存MCU 芯片ATSAM4E16EA 作为主控制单元,完成配置X2、LP8725以及RAM 等芯片的任务,协调各个硬件模块之间的工作,以及提供雷达接收帧数据的存储与传输接口,实现与上位机通信的功能。具体的工作流程如图5 所示。
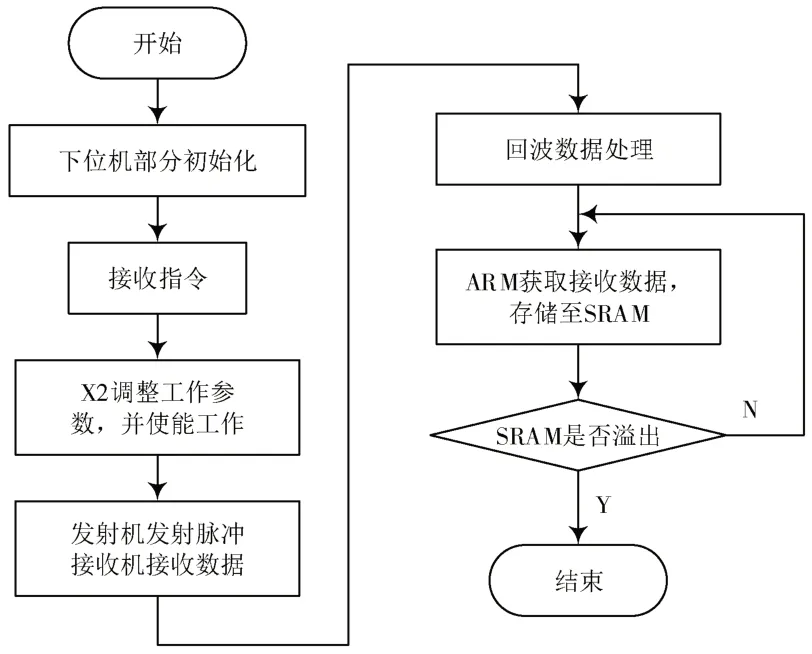
图5 下位机工作流程
首先初始化ARM 主控制单元,令MCU 发送使能序列至PMU,配置供给电源,再初始化ARM 的SPI 和GPIO模块,根据指令配置X2 的相关寄存器,调整工作参数,如发射信号的中心频率和脉冲重复频率等;然后X2 开始工作,发射机发射超宽带脉冲信号并通过射频前端电路处理后辐射到空间中,接收机再接收目标物体的反射波,进行滤波放大处理以及模数转换后成为雷达接收帧数据;最后ARM 通过SPI 访问X2 的存储区,获取雷达接收帧,并存储至SRAM 中,直至SRAM 存满。
1.3.3 上位机软件设计
针对下位机的工作流程,以及操作界面简洁美观的要求,本文开发了一款人机友好的上位机软件,用来实现对下位机的配置和接收数据处理与图形化显示等功能。开发平台选用 Linux(Ubuntu 16.04)环境下的 Qt 5.9,编程语言使用C++,程序流程如图6 所示。

图6 上位机软件程序流程
程序从线程的角度主要分为主线程和工作线程。主线程主要实现相关数据和图像的显示和上位机工作指令的下达;工作线程处理比较耗时的程序内容,提供了与下位机交互的接口,包括参数值的传输、接收雷达数据的获取以及对该数据进行微多普勒频移分离处理。
软件的具体功能包括两个:
1)配置下位机的工作参数,包括脉冲重复频率、发射波中心频率和探测范围(0~10 m 可调)等,然后实现对雷达回波数据的实时采集和图像显示。
2)对录制的雷达回波数据进行回放和深入分析,可选择显示原始波形和处理后的雷达波形,并且可导出雷达数据帧文件。
2 系统测试及结果分析
2.1 目标位置测试
在雷达辐射方向上的不同位置放置A4 纸大小、厚度为1 cm 的书本,可以从上位机软件上观测到相应的回波信号图像,得到的测试结果截图如图7 所示。

图7 目标距离测试结果截图
由雷达回波图像可以看出,左侧的回波为由发射机直接耦合到接收机的超宽带脉冲,右侧的回波为发射机辐射到书本反射回来的脉冲。将雷达回波的时间尺度转换为距离尺度,可知该图像反映的书本距雷达的距离在0.55~0.6 m 的范围内,有效地表征出目标的位置信息。
通过多次测量与调整,可以测得本系统探测目标的距离分辨率可达到毫米级,符合高分辨率的要求。
2.2 目标微动检测
由于人体的呼吸会使胸腔具有起伏的微动特征,因此针对系统的微动测试实验,选择测量成人呼吸的特征参数。首先使目标坐在距雷达40 cm 处,静止面向发射与接收天线,在其正常呼吸的状态下,获取1 min 内的雷达采集数据。经过滤波分离可得呼吸的信号图像,如图8 所示。

图8 呼吸信号图像
经计算,呼吸频率为15 次/min,与实际结果相同。实验证明,该微多普勒雷达系统可以实现目标微动特征的提取与识别。
3 结 语
本文基于脉冲超宽带技术设计了一款轻小型化的微功率微多普勒雷达系统,通过对关键性能指标进行改进,能够准确地探测和识别微动目标的位置及微动特征。测试结果表明,该雷达具有分辨率高、功耗低、便于集成等优点,为探测领域提供了一套精良的微动目标识别系统。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
雷达学报(2018年5期)2018-12-05
宇航计测技术(2018年3期)2018-09-08
雷达学报(2018年3期)2018-07-18
雷达学报(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
电子器件(2015年5期)2015-12-29
柴油机设计与制造(2015年3期)2015-12-05
现代防御技术(2014年6期)2014-02-28
机械与电子(2014年2期)2014-02-28