
智能服务机器人的设计应用
2021-03-15 19:05谷良田梁礼贤程仁煌黎坤华林孔鹏
锦绣·下旬刊 2021年9期
谷良田 梁礼贤 程仁煌 黎坤华 林孔鹏

摘要:国家提出的科技强国战略以来,我国科技研发事业得到了前所未有的发展,能力得到了全方位提升和突破。针对人们的收入水平、消费水平的不断提高,同时工作压力也不断增大,人们极想从繁琐的劳动家务中解放出来这一问题,我们对智能服务型机器人进行了设计与应用研究,使其能够采用机械手将垃圾拾取到自带垃圾桶和吸尘器自动吸尘的方式,从而完成家庭垃圾清理的功能。
关键词:智能家居;清洁机器人;设计;应用
1.引言
随着科技水平的不断提高,机器人已不再只用于工业化生产,而是逐渐出现在家庭生活中,人们对智能家用机器人也不再陌生;同时,现代生活节奏不断加快,人们不仅要忙于繁重的工作与应酬,还要处理各种各样的家务,因此我们团队研发了一款低成本,功能齐全的智能清洁机器人,以此更好地追求高品质的生活。文章就智能服务机器人的设计应用做出相应的概述,具有一定的参考价值。
2.智能服务机器人的结构设计
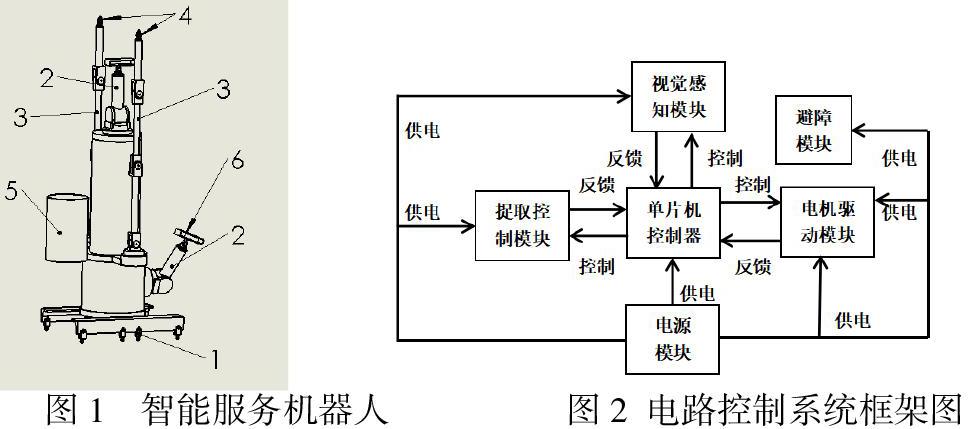
智能服务机器人由1--底座移动轮组、2--可伸缩吸尘器、3--机械手、5--垃圾桶、6--吸尘收集器等基本构件组成。结构简单,组装方便,易拆卸,易清洗,日常不需要太多维护, 大大降低了日常维护频率。
1)底座移动轮组。底座移动轮组由8个小移动轮组成,左右各自4个为一组,分别由两个直流电机驱动。在实际使用中,可实现机器人的全方位旋转、自主移动。
2)可伸缩吸尘器。可伸缩吸尘器由可伸缩小液压缸和吸尘套嘴、底部的直流电机组成,可实现预定的吸尘工作。
3)机械手。机械手为可伸缩式的直管和四指手爪组成。两处关节连接并且可旋转。每处关节分别由舵机驱动,大方面地保障了垃圾的拾取工作。
4)垃圾桶和吸尘收集器。垃圾桶和吸尘收集器由空心桶组成,并嵌套在机器人中部,可替换与摘除,对垃圾收集起到保障作用。
机器人通过传感器检测到所需要清洁的环境系数自动识别灰尘程度和垃圾,将传感器检测到的数据进行处理自动生成控制程序,驱动机器人八个驱动轮移动到有灰尘或者有垃圾的区域,吸尘器 1 和吸尘器 2 结构原理相同,所处位置不同,有两处都可旋转到任意角度,轴为可伸缩式的直管。地面上的灰尘使用吸尘器 2 进行吸尘工作,墙壁有灰尘则使用吸尘器 1 进行吸尘工作, 地面上的垃圾通过机械手的四爪结构拾取垃圾放进垃圾桶,底座移动轮由 8 个驱动轮和基座组成 垃圾桶可自由装卸。智能服务机器人可以边吸尘边拾取垃圾,也可独立工作,是一种方便高效家用服务型清洁机器人,如图1所示。
3. 智能服务机器人控制系统硬件设计
机器人控制系统硬件主要由单片机控制器、视觉感知模块、捉取控制模块、电源模块和电机驱动模块组成系统框图如图2所示。
1)视觉感知模块。采用OV7670摄像头模块进行图像采集,通过opencv算法实现物体大小及形状的检测。反馈图像到STM32控制器模块,通过算法分析控制捉取模块实现物块的捉取。
2)控制捉取模块。为了更加灵活方便,单个机械臂共采用4个舵机,使用STM32单片机产生的PWM信号进行控制。单片机通过硬件进行计数,受外界干扰少,工作可靠。通过控制4个舵机实现4个自由度机械手的捉取控制。相对于传统模拟舵机,反应变得更快,加速和减速时也更迅速更柔和,使得数字舵机提供更高的精度和更好的固定力。
3)电机驱动模块。考虑到机器人行走装置、立体结构、各传感器模块、机器人整体重量、工作电压以及控制方式等因素。采用N20直流减速电机作为机器人的驱动电机,工作电压5V,额定转速66r/min,额定转矩为1Kg每厘米,以满足机器人整体的设计要求。
由于采用八輪驱动,采用四个DRV8833双驱动模块,可用来驱动电机。该模块相对于传统的TB6612FNG效率上提高很多,体积小,工作电压低,在额定范围内芯片基本不发热。可简单方便地实现直流减速电机地控制,简化了电路的结构。
3.1 物体识别和定位算法
单目视觉识别是指只使用一个摄像头完成物体识别的技术,采用opencv算法配合ov7670摄像头模块对物体进行大小与结构识别,在精度要求相对较低、场景简单开阔的平台,单目视觉识别在识物体识别和定位算法领域具有广泛的应用场景。识别物体一次只需要2至4毫秒,实时性强。
4.智能服务机器人功能
该智能服务机器人能够凭借一定的人工智能,自动在家庭、宾馆、写字楼等室内环境完成清洁工作,一般采用机械手将垃圾拾到自带垃圾桶和吸尘器吸尘的方式,从而完成地面清理的功能,也可以在公园、广场、远动场等室外环境进行垃圾捡拾工作。机身为自动化技术的可移动装置,配有集尘盒的真空吸尘装置和垃圾桶,配合机身设定控制路径,在室内反复行走,如:沿边清扫、集中清扫、随机清扫、直线清扫等路径打扫,并辅以边拾取垃圾。这样可以加强打扫效果,以完成拟人化清洁效果。
4.1 自动吸尘
该智能服务机器人使用结构相同的两个可伸缩吸尘器和吸尘收集器组成吸尘系统。吸尘器1和吸尘器2结构如图3、图4所示,所处位置分别为一左一右,分别由直流电机驱动。当机器人检测到灰尘时,系统做出相应反应,摄像头和传感器发出指令,机器人移动到相对应的位置,可伸缩吸尘器开始工作。吸尘器可根据所在灰尘的位置不同,伸缩与旋转,以达到预订的吸尘结果。
4.2 自动拾取对应垃圾
该机器人可以实现对应垃圾的拾取功能,以弥补吸尘装置对大物体垃圾不可吸取的缺点。抓取系统分别由三节机械手轴和四指手爪组成,分别由360度和180度的舵机驱动,以实现抓取的功能。机械手轴为可伸缩式的直管,交接处关节连接并且可旋转,当系统识别物体时,传达相对应的指令,机械手可绕着Z轴进行360°旋转和X轴180°旋转,以实现精准抓取的功能。这样,该机器人不仅可以吸收地上的灰尘,还可以清洁大颗粒的垃圾,实现大范围的清洁,实现更智能化的清洁,四爪结构如图5所示。
4.3 自动识别路径
该智能服务机器人使用充电电池运作,操作方式以遥控器、或是机器上的操作面板进行;可以设定时间预约清理,自行充电,自带充电系统。机器人前方设有传感器与摄像头,可侦测障碍物,如碰到墙壁或其他障碍物,会有选择地自行转弯,同时也可自动识别垃圾和灰尘程度,将传感器检测到的数据进行处理自动生成控制程序,从而有规划地清扫。除了清理功能,该机器人还具备放置芳香剂、驱蚊剂和光触媒杀菌等功能。
5.结语
本文从实际出发,解决了当下家庭清洁方面劳动繁杂,人工成本过高等问题。对智能家居服务型机器人进行了优化设计,使其更加便捷,易于操作。本设计让机器人具有自动吸尘,自动捡拾垃圾,放置芳香剂等功能,大大提高了生活工作效率。不论是哪一功能,我们从实际出发,设计符合常规标准,对智能清洁服务机器人进行最佳设计,使其发挥出最大功能。
参考文献
[1]徐胜华.基于STM32 的智能扫地机器人研究与设计[D],广西师范大学,2016
[2]陈泳.智能扫地机器人电源系统设计[J],软件导刊,2016 15(2):93-95.
[3]陈伟安,李明贤,徐东镇,等.一种智能拖地机器人设计与研究[J],机械,2019(6):66-70.
[4]简毅,高斌,张月.一种室内扫地机器人全遍历路径规划方法研究[J],传感器与微系统,2018(1):32-34.
[5]李丽兰,叶双清.清洁机器人路径规划专利技术综述[J].科技经济导刊,2019,27(23):21.
基金项目:北部湾大学大学生创新创业训练计划资助项目(202011607121);
(北部湾大学 广西 钦州 535011)
猜你喜欢
计算机应用文摘·触控(2021年11期)2021-07-14
计算机与网络(2021年8期)2021-06-20
中国品牌(2020年11期)2020-12-23
互联网经济(2019年7期)2019-08-12
Coco薇(2017年5期)2017-06-05
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
Coco薇(2016年7期)2016-06-28
