
应用iGMAS超快速星历的实时精密单点定位研究
2021-03-16 09:15徐伟证康国华彭攀周宏涛刘宗强赵腾
中国空间科学技术 2021年1期
徐伟证 ,康国华,*,彭攀 ,周宏涛,刘宗强,赵腾
1. 南京航空航天大学 航天学院,南京 210016 2. 上海卫星工程研究所,上海 201109
为了进一步推动多模GNSS系统兼容和互操作,中国从2012年启动国际GNSS监测评估系统(International GNSS Monitoring & Assessment System, iGMAS)建设。iGMAS旨在建立我国自主的BDS、GPS、GLONASS和Galileo导航卫星全弧段、多重覆盖的全球近实时跟踪网,监控GNSS导航卫星的运行状况、信号质量和服务性能[1-2]。iGMAS能够向全球用户提供精密星历、钟差、地球定向参数等产品,为卫星导航技术试验提供支持,服务于科学研究以及各类应用,包括精密单点定位(Precious Point Positioning, PPP)技术[3]。
相对于事后处理的精密单点定位,实时精准定位才能满足5G、物联网和无人驾驶等技术发展的需求,其中高质量精密星历、钟差改正产品的实时获取和应用是难点之一[4]。目前国际上开展实时PPP应用主要基于IGS实时、近实时产品,包括IGS实时定位服务(real-time service)、IGDG(Internet-Based Global Differential GPS)实时产品和BNC(BKG Ntrip Client)软件等,以及西班牙GMV公司、Trimble公司等推出的商业实时PPP服务[5-7]。与国际上比较成熟的IGS系统相比,我国主导的iGMAS建设周期短,跟踪站、分析中心和数据中心数量相对较少,因此iGMAS产品(特别是超快速产品)的实际应用仍需进一步发展。
目前,国内外应用iGMAS超快速产品开展的实时精密单点定位研究,主要依靠跟踪站的观测数据模拟实时PPP解算[6, 8, 9],未能解决iGMAS超快速数据的实时获取和普遍实用问题。针对iGMAS产品的应用推广和实时PPP对超快速精密数据的需求,本文对iGMAS超快速星历产品精度和稳定性进行分析,并通过高精度的IGS最终产品进行评估。本文以评估结果作为依据选择精密改正数,设计了iGMAS-Download实时下载程序和实时PPP算法,通过NovAtel双频接收机验证了其在实时PPP中的性能,为iGMAS产品的应用提供借鉴思路。
1 iGMAS超快速星历质量分析
1.1 超快速星历精度分析
iGMAS和IGS卫星精密轨道均包括三种不同精度和时延的数据,即超快速、快速和最终产品。其中超快速产品包含24 h观测数据和24 h预测数据,更新频率为6 h,分别于当日03、09、15、21时左右发布,虽然存在约3h滞后时间,但基本可以满足实时定位的需求[10]。
IGS 已经在全球建立507个跟踪站,建有充足的分析中心、全球关联分析中心、区域关联分析中心及分析中心协调组织来协同处理数据,其最终产品轨道精度约2.5 cm,钟差精度约0.075 ns[4,8]。本文以精度较高的IGS MGEX(The Multi-GNSS Experiment)最终产品为参考标准,结合实时精密单点定位需求,选取iGMAS和IGS系统在2019年7月7日至13日(北斗周0705)的精密星历数据,计算一周时间内iGMAS超快速星历相对IGS最终产品参考真值的均方根误差(Root Mean Square, RMS),评估其数据的精度和稳定性。其中IGS最终产品从CDDIS(The Crustal Dynamics Data Information System)获取,iGMAS超快速产品从武汉数据中心获取[11, 12]。
iGMAS超快速轨道、钟差产品和IGS最终产品采样间隔均为15 min,但IGS产品采用GPS时间系统(GPST),iGMAS产品采用BDS时间系统(BDT),进行质量评估需进行时间基准的协调。本研究在精密轨道和钟差计算时以GPST作为时间基准,BDT与GPST的转换关系为[13]:
GPST=BDT+14+τUTC(USUN)-UTC(NTSC)
(1)
其中τUTC(USUN)-UTC(NTSC)表示GPS时和北斗时维持的协调世界时之间的微小量差值。从精度、阶数和历元间隔三方面衡量,9阶拟合多项式求解GPS卫星坐标可达毫米级精度,且效果最好[14]。因此本文采用9阶切比雪夫多项式拟合来计算轨道数据,选取北斗周0705期间内iGMAS超快速星历与IGS最终星历。
本文计算iGMAS超快速轨道与IGS最终轨道RMS差值,计算方式如下式所示[15]:

分别对iGMAS超快速星历和IGS最终星历合对GPS、GLONASS、BDS和Galileo系统在北斗周0705期间的轨道数据,各颗卫星轨道误差RMS和系统整体误差结果如图 1所示。
1)GPS/GLONASS/Galileo/BDS(MEO/IGSO)/BDS(GEO)和系统在北斗周0705期间,系统轨道误差均值分别为5.7 cm、9.8 cm、14.2 cm、18.0 cm、393.7 cm;BDS(GEO)卫星相对地面站空间几何构型较差,参数相关性强而很难精确求解,故精度较低。
2)由图1(a)~(e)可见,各系统卫星的轨道误差RMS分布较为均匀,系统轨道精度依次是GPS、GLONASS、Galileo、BDS(MEO/IGSO)、BDS(GEO); GPS卫星轨道精度稳定在厘米级,且误差RMS更为集中,主要得益于目前IGS地面跟踪站较多,更为丰富的观测数据有助于减小随机误差。
3)由图1(b)(e)可知,iGMAS数据目前提供的北斗卫星精密数据远少于实际在轨北斗卫星数,且系统间卫星轨道精度较为离散。主要原因是北斗导航系统近两年卫星部署较多,在轨调试需要时间,而iGMAS跟踪站数量少且分布集中,对北斗导航系统的监测质量和完善仍有待提升。


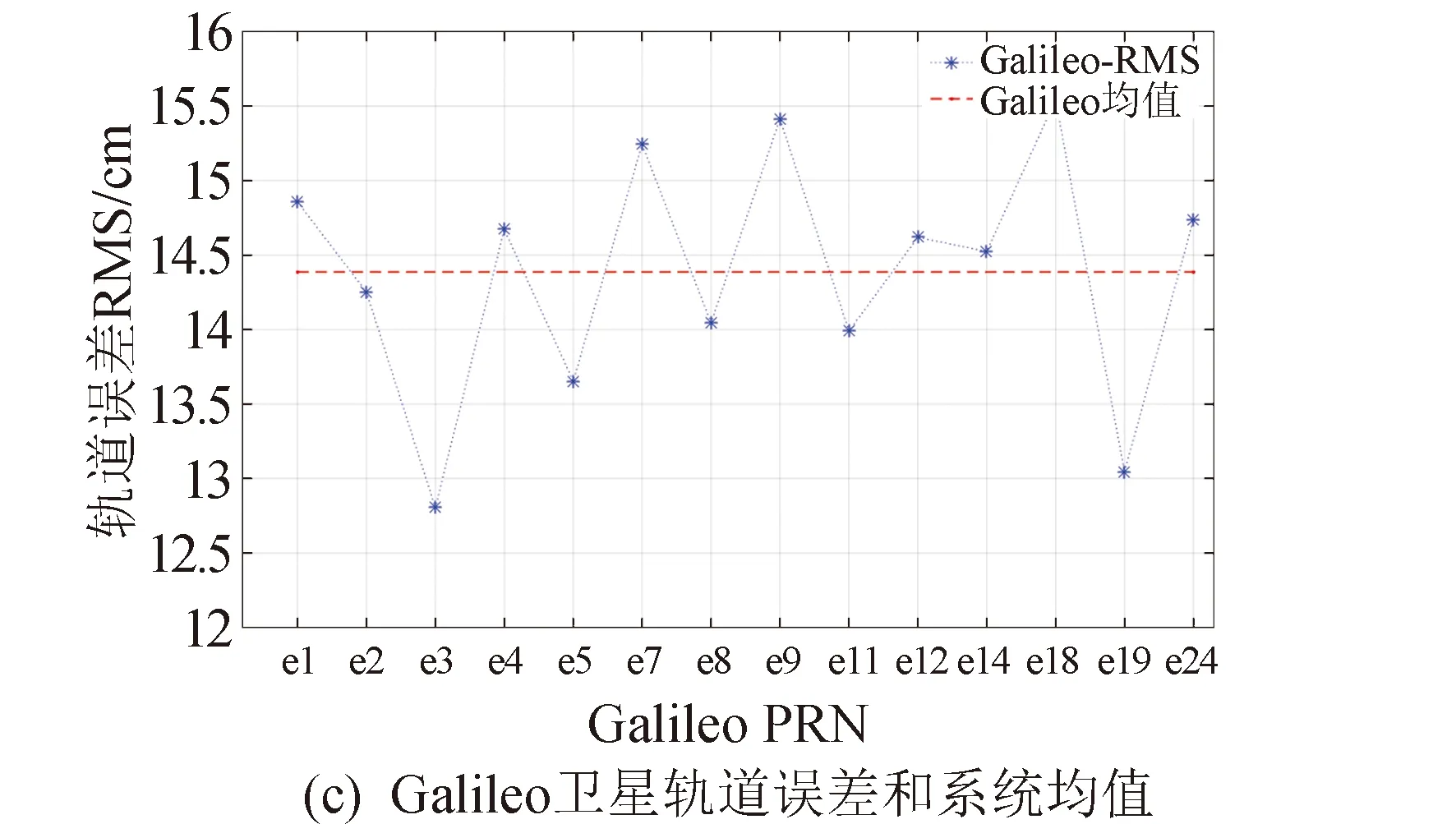
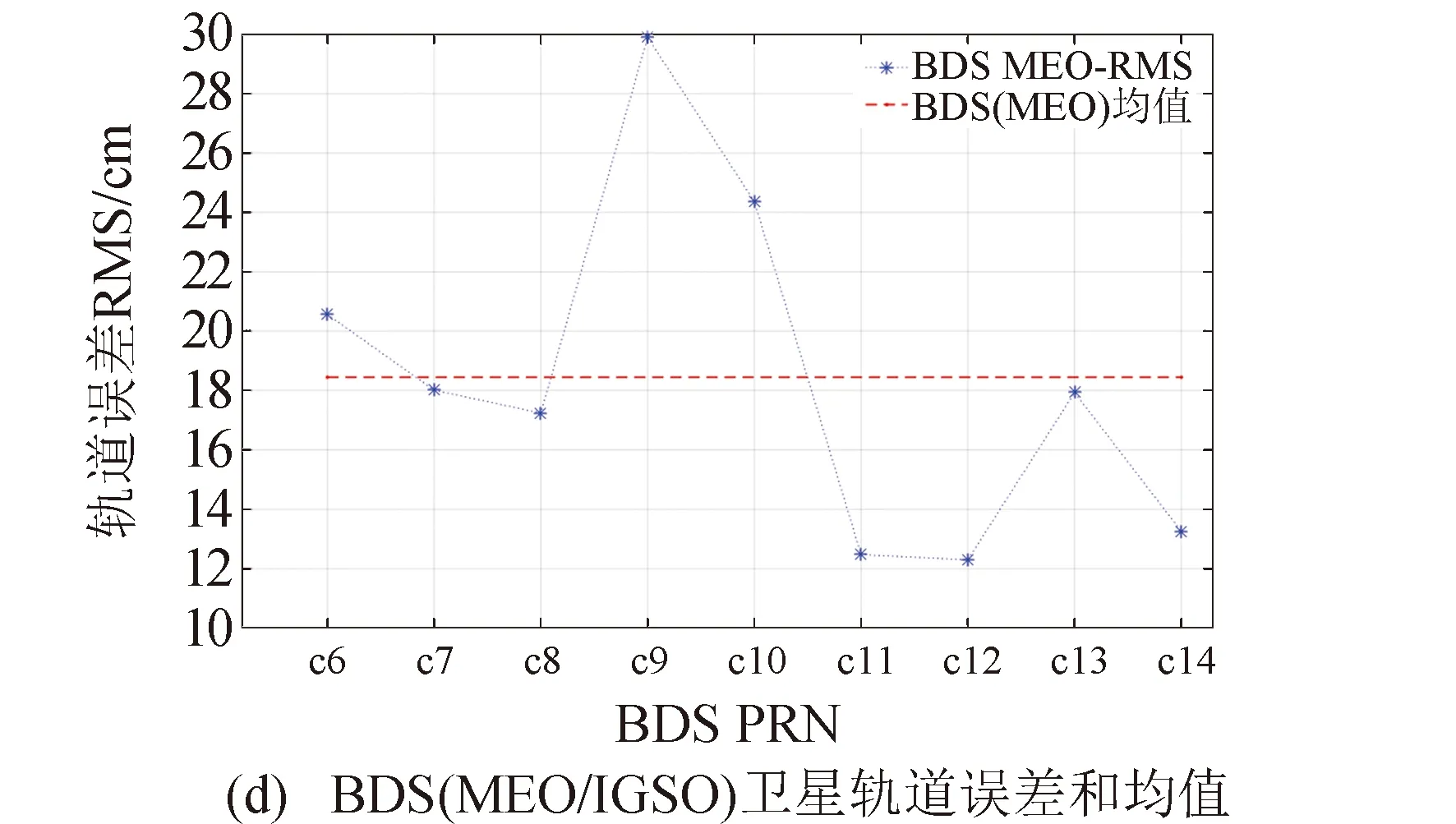
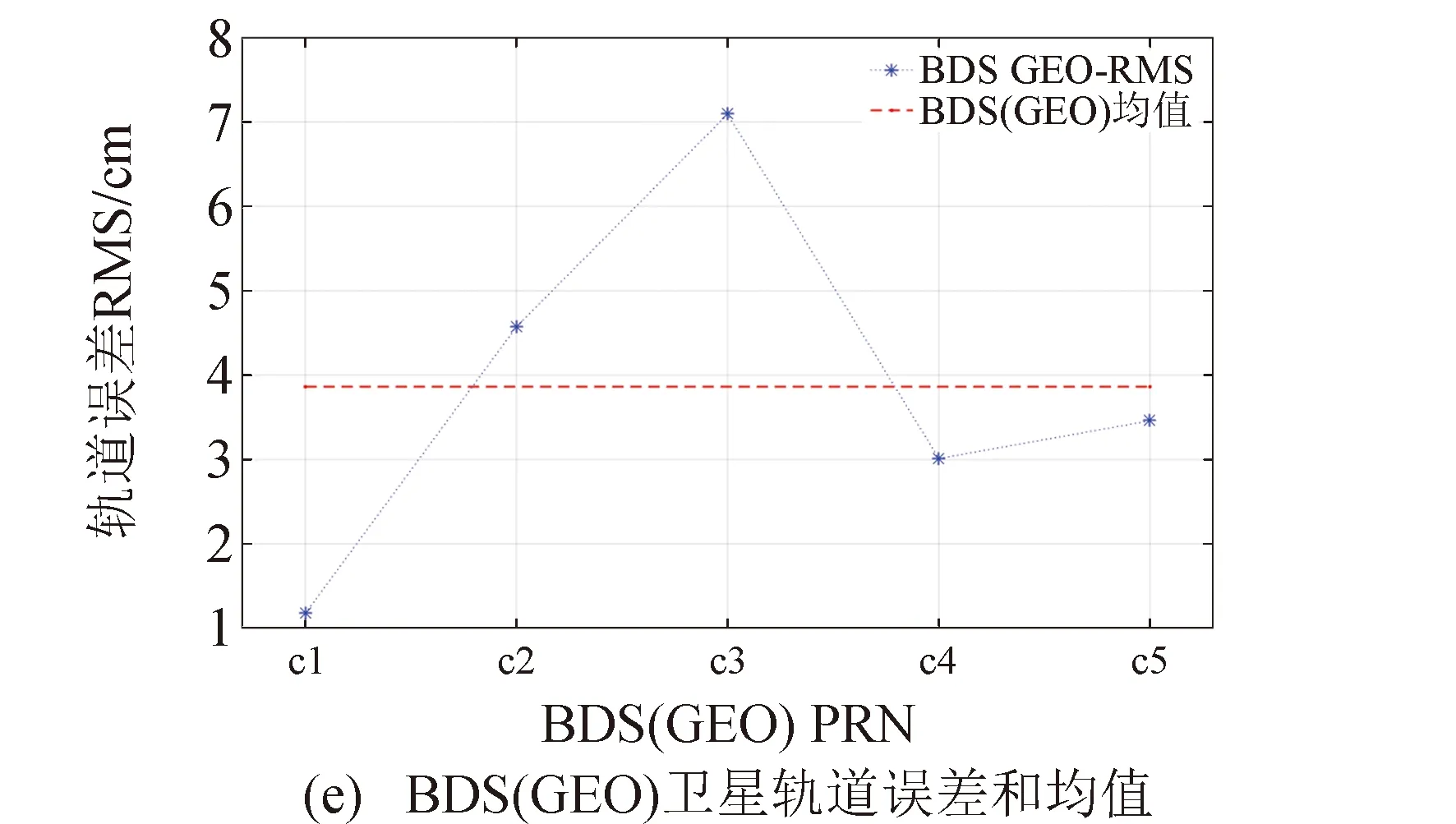
图1 iGMAS超快速星历与IGS星历各系统轨道差值Fig.1 Four navigation systems orbit error between iGMAS ultra-fast ephemeris and IGS final product
通过对四大导航系统iGMAS超快速星历的评估,可见GPS卫星星历精度在厘米级。卫星钟差同样是影响实时精密单点定位的重要因素,因此本文针对GPS系统的卫星轨道和钟差做了进一步误差分析,各颗卫星在ECEF坐标系下X、Y、Z和3D方向误差如图 2所示,各颗卫星和系统均值的钟差如图 3所示。在评估周期内,各颗卫星的X、Y、Z方向的轨道误差RMS均在2.0~5.5 cm范围内,且Z方向轨道误差略优于X、Y方向,各颗卫星3D误差均值为5.78 cm。各颗GPS卫星的钟差集中在2.94~3.1 ns区间内,系统均值优于3 ns,需要基于超快速轨道对钟差进一步估计才能满足厘米级定位需求。

图2 iGMAS超快速与IGS最终产品GPS卫星差值RMSFig.2 GPS orbit error between iGMAS Ultra-fast and IGS final product

图3 iGMAS超快速与IGS最终产品的GPS卫星钟差Fig. 3 GPS satellite clock error between iGMAS Ultra-fast and IGS final product
1.2 超快速星历稳定性分析
实时PPP应用性能与精密星历的稳定性紧密相关。本文主要从系统轨道精度在一定周期内的变化趋势,以及超快速星历观测和预报部分的精度变化趋势来评估其数据稳定性。
在北斗周0705期间四大导航系统每天卫星及星座轨道误差RMS,在拟合期间变化趋势如图 4所示,图 5表示GPS卫星轨道变化。
1)由图4可见在拟合周期内GPS星座系统稳定性最优,轨道整体误差和仿真周期内波动均相对最小;GLONASS稳定性次之,存在小范围波动,应与当日观测数据质量有关;BDS(MEO/IGSO)以及Galileo导航系统相对波动较大。
2)由图4可见在拟合周期内,GPS、GLONASS和Galileo系统不同卫星的轨道误差RMS变化趋势相同,轨道误差同步增大或减小;BDS(MEO/IGSO)存在系统间定轨精度离散性相对较大的情况,更说明iGMAS需要建设全球分布监测站或低轨星基监测站,以提升北斗导航系统整体稳定性。
3)由图5可见GPS卫星在拟合周期内,所有卫星的轨道误差范围均在3.4~8.2 cm,不同卫星在同一天的轨道误差差别较小,误差范围集中且系统整体定轨精度高;GPS系统有完善的全球分布的跟踪站,可以实现卫星的全弧段多重覆盖。

图4 四系统轨道误差在拟合周期内的变化趋势Fig.4 GPS、GLONASS、BDS(MEO/IGSO)、Galileo orbit error

图5 iGMAS超快速轨道相对IGS最终轨道差值变化Fig.5 Orbit difference changes between iGMAS ultrafast orbit and IGS final product(GPS)
iGMAS超快速星历在一周拟合周期内GPS系统定轨精度在厘米级且最稳定,目前依靠iGMAS超快速星历开展实时精密单点定位试验可优先选取GPS卫星观测值参与定位解算,卫星数量不足的情况下,可以用GLONASS系统联立组合精密单点定位。
iGMAS超快速星历观测和预测部分相对IGS最终产品的误差分别如图6(a)(b)所示。在拟合周期内,观测部分星历相对精度高且稳定,除个别卫星外,X、Y、Z方向误差大致在±6 cm范围内。预测部分的轨道误差相对较大,部分卫星超过10 cm范围,且随预测时间越长轨道精度越低,因此实时PPP试验需要实时获取最新的iGMAS超快速星历,以实现最优精度的卫星端误差消除。


图6 iGMAS超快速星历观测、预测部分与IGS 最终精密星历差值变化Fig.6 Error change of iGMAS ultra-fast ephemeris observation, prediction part and IGS final ephemeris
2 基于iGMAS产品的实时 PPP定位
2.1 实时PPP定位方案设计
iGMAS超快速星历的评估结果分析表明,目前GPS卫星精度最高且稳定性好,GLONASS次之,BDS(MEO/IGSO)和Galileo系统均存在一定范围的波动,BDS(MEO/IGSO)各颗卫星定轨精度较为离散。iGMAS超快速星历观测部分精度和稳定性优于预测部份,且随预测时间越长精度越低,选取最近的超快速星历有助于降低卫星轨道和时钟误差。因此,本文设计iGAMS产品实时/事后下载软件iGMAS-Download,实时获取最新的超快速星历,采用NovAtel双频接收机获取GPS卫星观测数据开展实时精密单点定位应用研究,以验证iGMAS超快速星历在PPP试验中的实用性能。
本研究采用的实时PPP定位验证方案如图 7所示,通过自主设计的iGMAS-Download应用程序联网实时获取最新的iGMAS超快速星历、钟差。NovAtel OEM 617接收机双频伪距、载波相位观测数据、广播星历和原始定位结果,实时经串口转USB通道输入到计算机中,计算机进行观测数据预处理、精密数据拟合以及实时PPP算法,实时输出PPP定位结果。最后以北斗伴侣M2 RTK固定解为参考真值,结合接收机原始定位结果和实时PPP定位结果进行多通道定位结果的误差对比分析,从而验证iGMAS超快速星历在实时PPP应用中的性能和可用性。

图7 实时PPP技术方案设计Fig.7 Real-time PPP technology solution
2.2 iGMAS数据实时获取和应用
iGMAS已建成长沙、武汉、西安3个数据中心,用户可通过任一数据中心或直接通过iGMAS官网(http:∥124.205.50.178)获取相关产品。实时PPP技术应用需要获取最新的超快速精密星历产品,为了满足本研究实时PPP算法的需求以及推广iGMAS数据产品的实际应用,本文基于Windows平台设计了实时/事后下载iGMAS精密数据的应用程序iGMAS-Download,程序下载文件的流程设计如图 8所示。该程序包括实时和事后下载两种模式,实时下载数据主要面向iGMAS超快速星历,其文件命名格式为isuwwwwd_HH.sp3/clk.Z(wwww为北斗周;d为星期,0为星期日,1~6表示星期一至六;HH为小时,分为00,06,12,18;sp3/clk分别表示星历和钟差文件)。程序实时刷新iGMAS数据中心产品列表,根据系统时间匹配最新的超快速产品文件,下载到指定文件夹并自动解压,以备实时PPP算法读取应用。事后模式可以根据用户需求批量下载其他产品,包括卫星轨道钟差、跟踪站地心坐标、地球自转参数、大气环境参数、频间偏差信息、电离层闪烁指数、民用监测评估结果、完好性产品等。

图8 iGMAS数据实时下载程序设计流程Fig.8 iGMAS data download program flowchart
2.3 实时PPP算法设计
本文采用PPP常规模型进行解算,采用双频伪距、载波相位观测值的无电离层组合作为函数模型,其基础模型表达式为[16-17]:

(2)
为保证高精度定位的质量,本文首先剔除低高度角卫星,并依靠高度角权重模型进行定权,定权模型如式(3)所示[18]:
δ2(e)=δ2/sin2(e)
(3)
式中:δ2是天顶方向的非差消电离层相位观测值的方差;δ2(e)是在高度角e处的相位观测值的方差。伪距观测值也在得到天顶方向观测值方差后,采用式(3)进行任意高度角映射,进而计算观测值权阵[18]。对观测数据进行实时预处理时,先剔除观测值存在粗差的卫星,再进行钟跳探测与修复,避免将接收机钟跳引起的观测值跳变误判为周跳。然后联合使用宽巷Melbourne-Wubbena(MW)和Geometry-Free(GF)组合法进行周跳探测,对于出现周跳的卫星进行模糊度初始化。通过数据的实时预处理,来消除异常观测数据对PPP定位结果的影响[19-20]。
本文采用扩展卡尔曼滤波进行参数估计,待估参数为X=(x,y,z,dtr,zpd,Ni(i=1~n))T,依次为接收机位置参数、接收机钟差、天顶对流层湿延迟、可见卫星模糊度参数。精密轨道和钟差等产品采用iGMAS超快速产品,卫星和接收机端天线相位中心偏差(PCO)和天线相位中心变化(PCV)分别使用IGS ANTEX文件进行改正。实时定位过程同步使用IGS超快速产品进行数据处理和结果对比。各项误差采用模型进行处理,具体策略如表 1所示[9, 17]。

表1 PPP各项误差处理方法
3 实时PPP试验与分析
3.1 实时PPP定位试验环境搭建
2019年7月28日14:00-17:30在南京航空航天大学明故宫校区操场开展了实测数据采集和静态精密单点定位试验。当日天气状况良好,实验环境视野开阔无遮挡,数据采样间隔为1秒。使用NovAtel OEM617双频接收机(单点定位精度:水平5 m,高程10 m)实时接收GPS观测数据,截止高度角设为15°,使用北斗伴侣M2 RTK固定解(定位精度:水平0.02 m,高程0.04 m)作为定位结果参考标准。在定位参考点的设计上,通过将NovAtel天线和北斗伴侣M2架设到两台三脚架并调整抵消其高度差,预先测量水平和高度误差并在算法中予以修正。实验过程同步使用两台笔记本电脑进行数据读取和程序运算,以提高程序运算结果的可靠性。
3.2 PPP试验结果分析
本文使用iGMAS超快速星历和钟差产品,对GPS实测数据进行实时精密单点定位实验,其定位结果与NovAtel接收机自身定位误差对比如图 9所示,分别使用iGMAS和IGS超快速星历的实时PPP定位结果相对于参考真值在ENU坐标系下收敛情况如图 10、图11所示。

图9 iGMAS超快速星历实时PPP与接收机定位误差对比Fig.9 Comparison of positioning error between iGMAS ultra-fast ephemeris real-time PPP and receiver
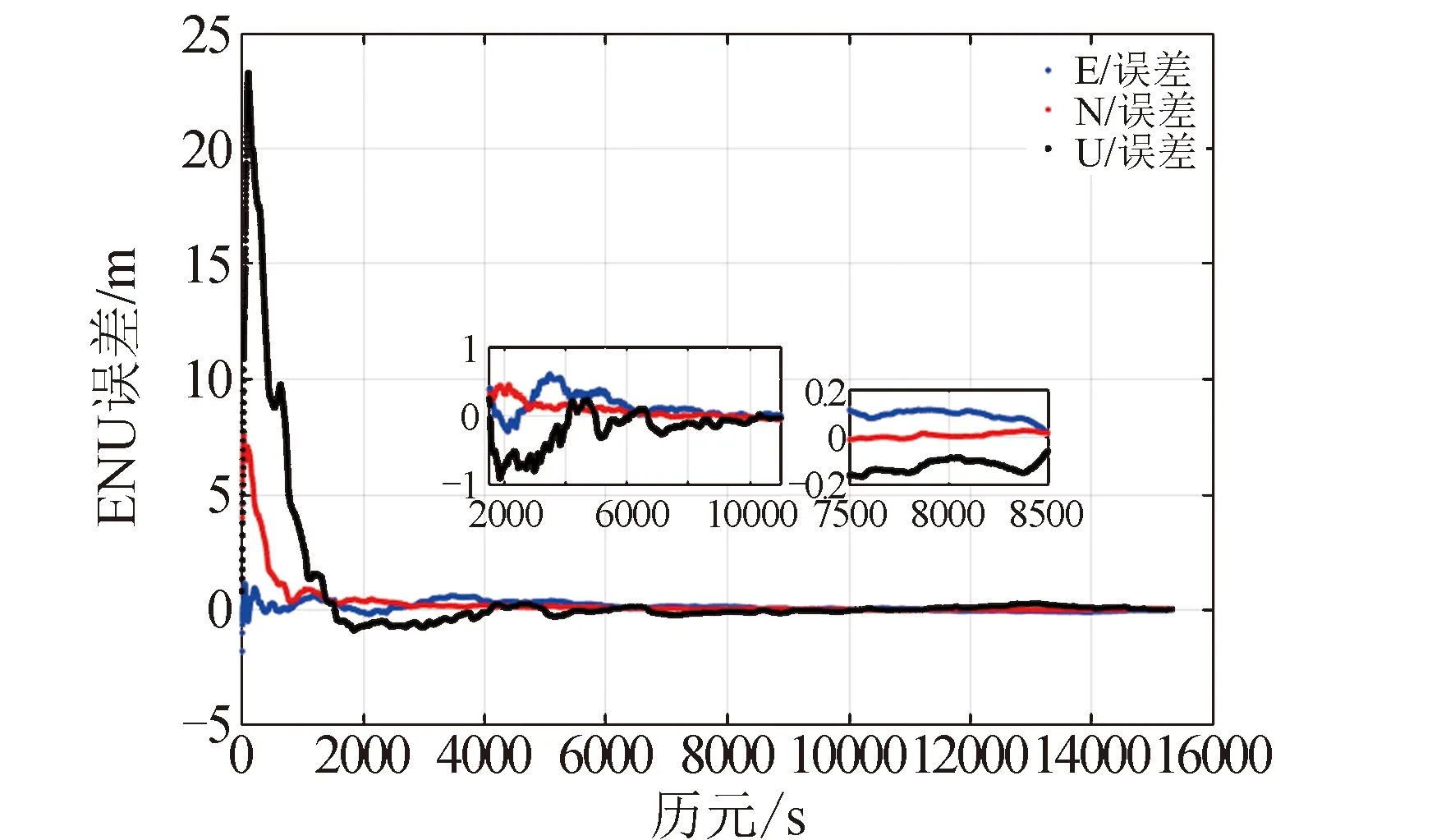
图10 iGMAS超快速星历实时PPP定位误差收敛情况Fig.10 iGMAS ultra-fast ephemeris real-time PPP convergence
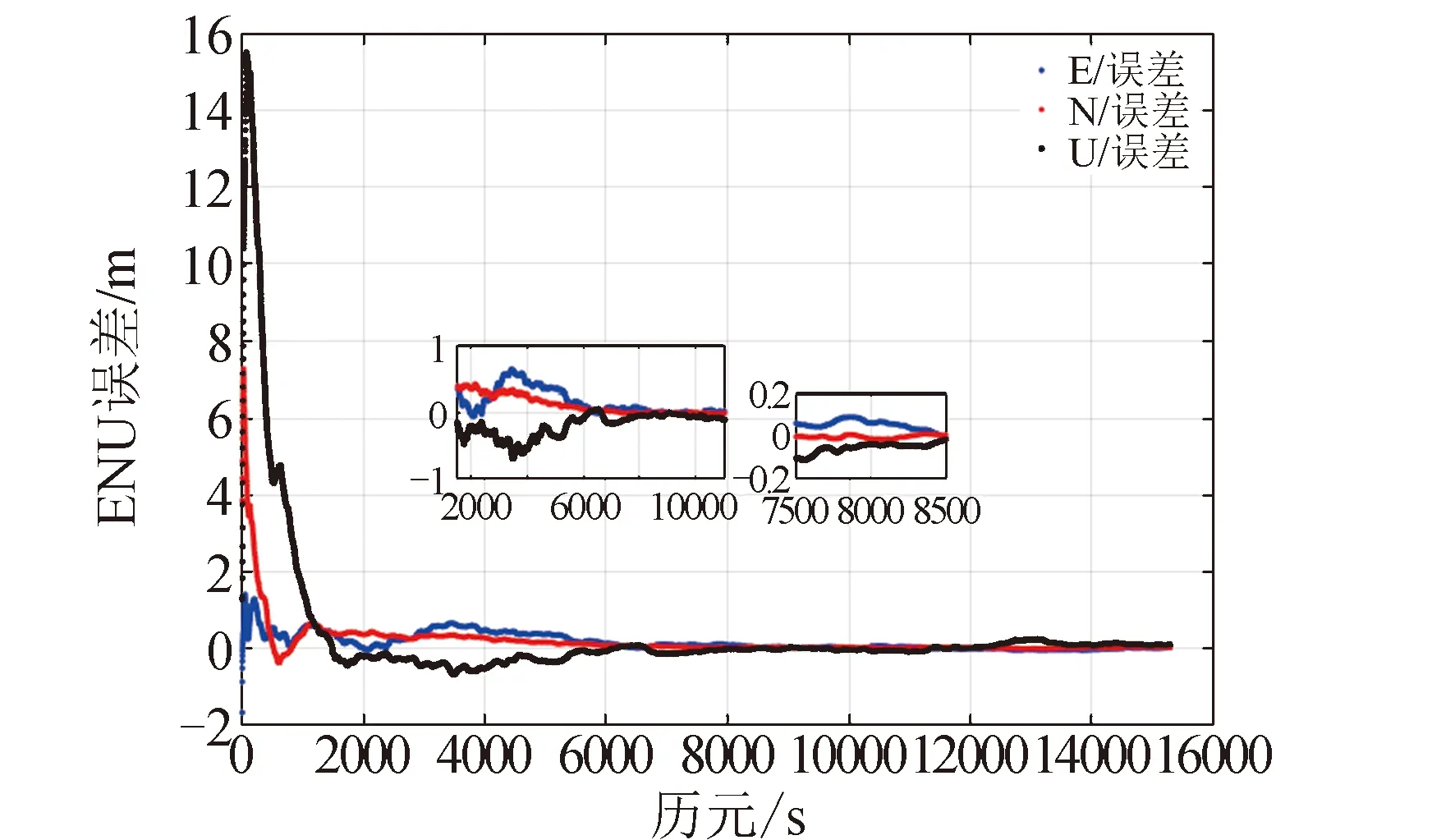
图11 IGS超快速星历实时PPP定位误差收敛情况Fig.11 IGS ultra-fast ephemeris real-time PPP positioning error convergence
1)由图 9可知,NovAtel接收机自身定位误差波动大,且方程方向误差较大;与接收机原始定位相比,应用iGMAS超快速星历的实时精密单点定位可以有效提升定位精度和稳定性。
2)由图 10和图 11可见,分别使用iGMAS和IGS超快速星历进行精密单点定位试验,其收敛时间和定位精度接近,连续观测约20 min后,PPP定位误差即可收敛到分米级,最终可收敛到20 cm以内。
3)由图 10和图 11,以及表 2可知,iGMAS超快速星历在实时PPP试验中可实现与IGS超快速星历相近的定位结果,应用iGMAS超快速星历的实时精密单点定位可以有效提升定位精度和稳定性,验证了iGMAS超快速星历的实用性能。

表2 接收机和实时PPP定位误差均方根统计
4 结束语
卫星精密星历是实现PPP的基础数据,其精度和可用性直接影响导航定位的性能。本文以IGS最终产品为参考标准,评估了iGMAS超快速星历的精度和稳定性,设计了iGMAS-Download应用程序实时获取最新的iGMAS超快速星历,以其中精度和稳定性较高的GPS卫星数据,结合NovAtel双频接收机开展了实时PPP定位算法研究和试验,得到如下结论:
1)iGAMS超快速星历中,GPS卫星精度和稳定性最高,具有较高的可用性,GLONASS次之,BDS(MEO/IGSO、GEO)和Galileo系统均存在一定范围的波动。GPS卫星星历得益于数量众多且全球分布的IGS跟踪站支持,可以通过全弧段多重覆盖的观测数据来提高精度。
2)北斗导航系统精密改正数据,存在卫星数量不足、卫星精度相对较低(特别是GEO卫星),以及系统间卫星轨道误差离散性较大的问题。未来有望通过建设更多全球分布的地面监测站或低轨星基监测站,以及星间链路技术来提升北斗产品的精度。
3)本文设计的iGMAS-Download软件可以实时获取最新iGMAS超快速星历,基于该数据的GPS实时PPP算法在结合NovAtel双频接收机试验中,与应用IGS超快速星历定位精度和收敛时间接近,验证了iGMAS超快速产品的应用性能,有助于推动我国iGMAS产品的实际应用。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
汽车实用技术(2022年11期)2022-06-20
导航定位学报(2022年1期)2022-02-17
国际太空(2021年11期)2022-01-19
船海工程(2021年3期)2021-06-28
地理教育(2019年1期)2019-03-06
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
作文与考试·小学高年级版(2017年16期)2017-08-14
中国化妆品(2017年12期)2017-06-27
