
无人机倾斜摄影测量在海外公路勘测中的应用
2021-03-17 07:41王永杰
科学技术创新 2021年5期
王永杰
(中铁十四局集团海外分公司,山东 济南250014)
1 概述
近年来,我国无人机倾斜摄影测量技术发展迅猛,相比于传统测量技术,无人机航测技术具有快速高效、机动灵活、分辨率高、处理速度快、运行成本低等特点,厄瓜多尔瓜兰达公路项目参照我国无人机航测技术标准,采用无人机倾斜摄影测量技术进行航测公路地形图,取得了良好的勘测成果。
2 工程概况及无人机系统简介
2.1 厄瓜多尔瓜兰达公路概况
瓜兰达市绕城快速通道公路项目位于南美洲厄瓜多尔玻利瓦尔省瓜兰达市,起点位于瓜努霍市,终点与通往钦博镇的491 国道相连,线路全长13.29 千米,采用双向两车道,设计时速80 公里/小时,路基宽度17.3m,设计荷载为一级公路,计划于2023 年建成通车。
2.2 无人机航测系统简介
(1)无人机飞行平台: 瓜兰达公路地形航测采用的无人机型号为大疆PHANTOM 4PRO 无人机,机身采用四旋翼结构。(2)无人机的导航控制系统:无人机的导航控制系统采用DJI Guidance 导航系统,Guidance 具有视觉里程计、避障、RGBD 等多个功能。(3)无人机摄影及地面面站系统:本项目采用的大疆PHANTOM 4PRO 摄影系统由一台2000 万像素单镜头相机和一个三轴云台组成,地面站系统采用大疆PHANTOM 4PRO 一体遥控器,最大信号遥控距离为8km。
3 无人机倾斜摄影测量应用
3.1 无人机倾斜摄影测量外业流程图
无人机倾斜摄影测量主要分为外业飞行拍摄及内业数据处理两个部分。其中外业拍摄流程图如图1。
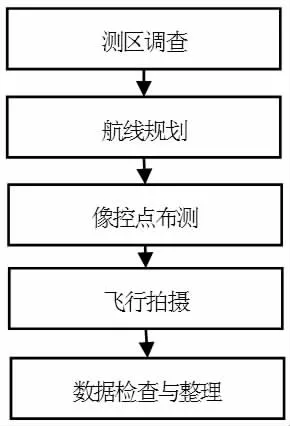
图1 无人机航测外业拍摄流程图
3.2 测区调查
瓜兰达公路项目航测区域位于瓜兰达市东南角,属山地地貌,沿线路里程K5+900 至K6+900。该区域地势较为复杂,线路左侧有块一山地,相对高度约为150m。由于测区位于当地一社区处,范围内存在多处农田、民房及果园等。根据工程实际要求,需对测区内地形地貌、民房建筑面积及乡间公路位置等多个数据进行测量,测图精度要求为1:2000。
3.3 测区航线规划
(1)无人机航线规划要满足以下要求:①航线规划须按照略高于地形图所需的分辨率进行设计。②航线须完整覆盖整个航拍区域,并适当进行外扩。③参照无人机续航速度、巡航时间及遥控信号是否存在遮挡等参数进行规划飞行航线。④航线规划前需对当地禁飞区及限飞区域进行查询,如需在此区域内航测,须提前向当地政府申请进行解禁。(2)通过对瓜兰达公路测区实地踏勘,决定将无人机起飞点设置于测区东北山坡之上,以确保整个测区遥控信号没有遮挡,航线采用3D“井”字型航线。根据地形图精度要求,地面分辨率为5cm,航高计算公式如下:

式中:
h- 飞行高度;
f- 镜头焦距(大疆精灵4pro 镜头焦距为8.8mm);
a- 像元尺寸(大疆精灵4pro 像元尺寸为2..41228μm);
GDS- 地面分辨率(5cm)。
按照上式计算,当地面分辨率为5cm 时,无人机相对行高为182m,当相对行高120m 时,获得的影像照片GDS 约为3.3cm。综合考虑瓜兰达公路无人机航测相对高度取150m。航向重叠率为80%,旁向重叠率为65%,飞行架次划分为4 次。
3.4 像控点布测
3.4.1 像控点布设原则
(1)像控点布设要在整个测区均匀分布,选点要尽量选择固定、平整、清晰易识别、无阴影、无遮挡的区域。(2)可以利用斑马线直角点、地面直角点;设置后注意及时拍照标记。(3)像控点标志可做成“L”型或“十”,为提高精度,当布置成“十”字型时,应在“十”字中心喷涂直径为5cm 的圆点,当布置成“L”字型时,应统一测内角或者外角,如图2 所示。(4)针对带状测区,布点需要在带状的左右侧布点,按照“S”字型路线布点。
3.4.2 像控点预设
为提高航测效率,可在外出作业之前,预设拟布像控点位置。首先对前期收集测区相关的现有地形图、影像资料及测区范围等资料进行核查,做出像控点布置计划。在对现场实地踏勘时,了解测区地形情况,从而对像控点布设位置进行调整确认。同时可将像控点布置位置制成KLM文件,通过谷歌地图或奥维地图等,可快速找到像控点预设位置,从而提高布点工效。
3.4.3 布测像控点
瓜兰达公路项目航测区位于山地区域,考虑地形图精度要求,像控点布置间距为200m,形状为“L”型标志,采用喷绘进行布置,布设完成后及时使用RTK 测量像控点地理信息,本项目测区像控点详细布置位置如图2 所示。

图2 像控点布置图
3.5 无人机飞行拍摄
无人机航测宜选择晴天,不宜在太阳猛烈的天气拍摄,强烈的阳光会导致建筑墙面曝光过度,也不宜在阴天拍摄,阴天光线较弱,会导致曝光不足。在无风多云的天气,天空较亮,光线漫反射,此时拍摄效果最佳。起飞场地宜选择平坦的空地或者宽阔的道路,周围无高压线、高层建筑、及信号塔等。本工程无人机控制系统为大疆PHANTOM 4PRO 一体式遥控器,通过地面控制系统,无人机按照规划完成的航线进行作业。瓜兰达公路测区共计拍摄照片4500 多张,航测完成后及时检查整理拍摄照片、像控点测量成果、pos 数据及GNS 坐标等数据文件,经过整理的外业数据分门别类进行统一存放,归档保存。
3.6 无人机倾斜摄影测量内业数据处理

图3 无人机航测内业处理流程图
(1)本工程采用ContextCapture 软件对外业数据进行处理。将航拍照片及POS 数据导入ContextCapture 软件进行空三加密,通过导入光学参数对镜头畸变进行修正,通过控制点进行刺点,每个相控点至少要刺两张照片。采用DP-Modeler 进行三维测图生成DLG 成果。基本流程如图3 所示。(2)空三计算过程的注意事项。空三加密是三维建模的关键步骤,是重中之重的环节,同样也是最容易出问题的环节。在内业处理过程中,经常出现空三运算不通过以及出现卷曲或断裂现象,为避免以上情形发生,须注意以下几个事项:①空三计算之前,须导入相机出厂畸变参数,从而对照片进行修正。②对于较大区域的三维建模,建议进行分区空三计算,可大大增加空三成果率。③如果ContextCapture 效果不佳,可考虑采用Photoscan 进行空三计算。
4 航测成果及误差分析
4.1 无人机航测成果
通过内业数据处理后,瓜兰达公路航测区域快速获得测量成果,包括TDOM(真正射影像图)、实景三维模型及DLG(数字划线图)等。

图4 瓜兰达公路航测区域TDOM(真正射影像图)
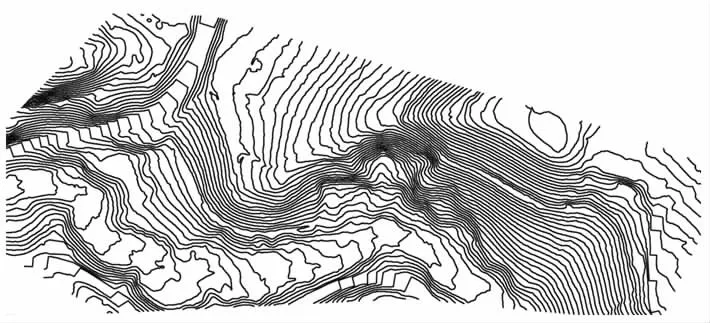
图5 瓜兰达公路航测区域DLG(部分)
4.2 航测成果精度分析
测区共布置30 个检查点,经过分析,80.6%的检查点高程绝对误差小于5.5cm,其中最大高程误差为9.3cm,最小高程误差为0.8cm,86.1%的检查点平面位置误差小于9.5cm,最大平面位置误差为11.6cm,最小平面位置误差为4.7cm。根据我国测绘行业标准化指导性技术文件《低空数字航空摄影测量内业规范》要求,1:2000 地形图平面位置误差不大于1.2m,高程误差不大于1.0m。瓜兰达公路无人机航测检查点平高误差远远满足国家规范的精度要求。
5 结论
厄瓜多尔瓜兰达公路无人机航测的应用是在海外公路勘测方向的一次新探索,通过应用我国先进测量技术,极大节省了厄瓜多尔瓜兰达公路勘测的人力物力,明显提高了勘测效率,有力推动了我国技术标准走向海外,也为海外类似工程提供了有效参考。
猜你喜欢
科技创新与品牌(2022年4期)2022-05-08
电脑报(2022年13期)2022-04-12
计算机应用文摘·触控(2021年20期)2021-11-11
建材发展导向(2021年2期)2021-03-02
英才(2019年10期)2019-10-28
西部资源(2018年1期)2018-11-01
焦点(2018年10期)2018-01-28
建筑建材装饰(2017年6期)2017-07-04
太空探索(2016年5期)2016-07-12
太空探索(2016年3期)2016-07-12
