
车道对中控制系统的驾驶员自适应需求验证
2021-03-25 01:54赵斌陈慧冉巍西村要介王建镇
汽车技术 2021年3期
赵斌 陈慧 冉巍 西村要介 王建镇
(1.同济大学,上海 201804;2.株式会社捷太格特,日本奈良6 348555;3.捷太格特科技研发中心(无锡)有限公司,无锡 214161)
主题词:车道对中控制系统 驾驶员自适应 需求验证 主观评价
1 前言
车道对中控制系统(Lane Centering Control System,LCCS)是一种常见的高级驾驶辅助系统(Advanced Driving Assistance System,ADAS),系统通过控制转向盘转角将车辆保持在车道中心线行驶[1],而大多数驾驶员在正常驾驶过程中并不会如此[2-3]。车辆在LCCS 控制下的行驶路径与驾驶员驾驶路径的差异可能会引起驾驶员的不适,而这会降低驾驶员使用LCCS的意愿[4]。
为了研究是否需要设计能够针对不同驾驶员调整车辆行驶路径的自适应LCCS 以提高驾驶员使用LCCS的体验,可以先设计一个自适应LCCS,如果能够提高驾驶员体验,则可以证明设计自适应LCCS 的必要性。现有的关于设计自适应系统的研究均存在理论上的缺陷,相关研究可以分为3种:一是将驾驶员按照驾驶风格分类,为不同风格的驾驶员设计ADAS 的参数[5-6],然而驾驶风格相近的驾驶员不一定会喜欢相同的ADAS参数;二是使ADAS 在控制车辆时直接模仿每名驾驶员的驾驶风格[7-8],然而驾驶员并不都希望ADAS模仿自己的驾驶风格[9];三是通过主观评价试验得到驾驶员喜欢的系统参数规律,设计自适应系统使得ADAS可以根据驾驶员的驾驶数据自动调整至其喜好的参数[10-11],该方法非常依赖主观问卷设计的科学性,由于缺乏对LCCS 主观评价的相关研究,很难设计出可以真实反映驾驶员对LCCS体验的主观问卷。
上述方案无法有效证明自适应LCCS 设计的必要性,本文设计基于相对评价的主观评价试验流程,通过卡方假设检验问题验证驾驶员对车辆在LCCS控制下的行驶路径是否存在明确喜好。
2 驾驶员驾驶数据采集
为了研究驾驶员是否会对自适应LCCS控制下的行驶路径表现出明显的喜好,需要采集一些驾驶员在道路中的驾驶数据作为设计参考。
2.1 试验场景设计
选择高速公路匝道作为研究场景,高速公路匝道半径一般较小,在这样的道路中,驾驶员会有很明显的切弯倾向[2],可能会对严格按照道路中心线行驶的LCCS更容易感到不适,因此将该场景设为研究场景。
本文的试验均在固定机座驾驶模拟器上完成。在搭建道路时,从开源地图OpenStreetMap[12]中下载上海市环城高速公路的一段匝道数据,如图1a 所示。将该段道路导入PreScan 中,得到3 个完全相同的研究路段(Road Sections of Interest,RSOI),如图1b所示。除了该研究路段,在搭建的场景中还有其他的连接路段,由于RSOI 为高速公路匝道内的弯道,因此连接路段被设计为高速公路,以及匝道进、出口部分的直线道路。

图1 数据采集试验道路
在道路路面设计时也参考了现实环境中该段单车道匝道的路面状况,设置车道宽度为3.5 m,并在车道右侧保留宽度为2.5 m 的应急车道,在左侧车道线与护栏之间余留0.75 m 空隙。搭建好的场景在模拟器上的显示效果与真实道路场景高度相似,如图2所示。

图2 单车道匝道道路场景
2.2 数据采集试验过程
共有11 名驾驶员参与数据采集试验,驾龄分布在2~6年之间,其中包含2名女性驾驶员。
在试验过程中,要求驾驶员在固定基座驾驶模拟器上通过控制转向盘将车辆保持在车道内行驶。车辆的纵向车速由程序自动控制,在高速场景中,车速保持100 km/h 恒速行驶,在匝道场景中,按照该段道路在真实场景的限速,车速保持40 km/h恒速行驶,在高速公路与匝道的连接部分,车速随时间线性变化。
对于每名试验参与者,在正式数据采集试验前,需要先在模拟器上沿搭建的环形道路场景中驾驶15 min,以熟悉该模拟器的显示效果以及车辆在各段道路上的车速变化。进行正式试验时,要求每名驾驶员在设计的道路中按照自己的日常驾驶习惯驾驶4圈,并记录驾驶员每次通过RSOI时的行驶路径。这些路径将作为后续评价试验中设计LCCS模仿驾驶员在该段道路内行驶路径的参考。
3 驾驶数据处理
在自然驾驶数据采集试验中采集到的驾驶员的驾驶路径过多,因此需要对这些数据进一步处理和筛选,以确定LCCS模仿的驾驶员路径。
3.1 驾驶员驾驶路径表示
本文参考文献[13]中的方法,使用Frenet 坐标系下的点集表示采集到的驾驶员在RSOI内的自然驾驶路径与道路形状的拓扑关系,过程如图3所示。从起始截面A1开始,沿车道中心线每隔固定距离s设置一个截面得到A2、A3,车辆的实际行驶路径与各截面的交点分别为R1、R2、R3,3 个交点与车道中心线的距离分别为d1、d2、d3。其中R1、R2位于车道中心线沿车辆行驶方向的左侧,R3位于车道中心线沿车辆行驶方向的右侧,这3 点在Frenet 坐标系下的坐标分别为(0,-d1)、(s,-d2)、(2s,d3)。本文按照上述方法可以将驾驶员的每条路径用点集R={R1,R2,R3,…,Rn}表示,取s=1 m。

图3 驾驶员行驶路径表示原理
3.2 路径聚类算法
本文采用聚类算法将驾驶员分类,从而提取出几条路径代表不同驾驶员路径类型。选用K 中心点(KMedoids)算法对驾驶员驾驶数据进行聚类,该算法是一种与K 均值(K-Means)算法十分相似的原型聚类算法。相较于K-Means算法,K-Medoids 算法的聚类中心为每一簇内与簇内所有样本距离之和最小的某个样本,而K-Means算法的聚类中心是簇内样本的均值向量,在本文中,聚类中心所表示的路径将作为设计模仿驾驶员行驶LCCS 的参考路径,因此有必要保证聚类中心为驾驶员的驾驶路径,故K-Means算法并不符合要求。
对驾驶员路径数据进行K-Medoids聚类的流程如图4所示[14]。其中衡量2个路径样本与差异性时用到的欧式距离[15]为:

使用K-Medoids算法对数据聚类时,首先要确定类别数量k,选择k时应考虑在该取值下是否可以得到较好的聚类效果。轮廓值[16]是一种用于评价聚类效果优劣的指标,可综合描述一个样本与其所在簇内样本的相似度和该样本与其他簇样本相似度的差异。对于聚类后某个属于簇Ci的样本,其轮廓值计算公式为:


图4 K-Medoids算法原理
对单个样本计算出的轮廓值在-1~1 范围内,聚类后该样本划入的簇越合理,其轮廓值越高,反之,当该值越低时,说明聚类算法未能将样本划入正确的簇。计算数据集中所有样本轮廓值的平均值,作为数据集整体聚类效果的评价指标。图5所示为k取2~6个时数据聚类后得到的轮廓值,由图5可知,当取k=4个时,可以取得最大轮廓值,即此时聚类效果最好。

图5 不同k取值下轮廓值比较
3.3 路径聚类结果
图6 所示为采集到的所有驾驶员驾驶路径可视化结果。经过聚类,这些路径被分为4个簇,如图7所示。在评价试验中,通过使车辆在RSOI 中跟随4 条聚类中心表示的路径,即可认为车辆的过弯方式代表了几种驾驶员的驾驶风格。
分别用路径A~路径D表示上述4条路径,如图8所示,4 条路径在图中的形状相似,侧向偏移量都随纵向距离的增大先减小后增大,线条趋势代表这些聚类中心表示的路径均在入弯过程中向弯道内侧偏移,出弯过程中向弯道外侧偏移,即驾驶员在过弯时均有明显的切弯倾向。4条路径的主要差异为横向位置的分布范围。

图6 驾驶员在RSOI内行驶路径可视化

图7 聚类结果
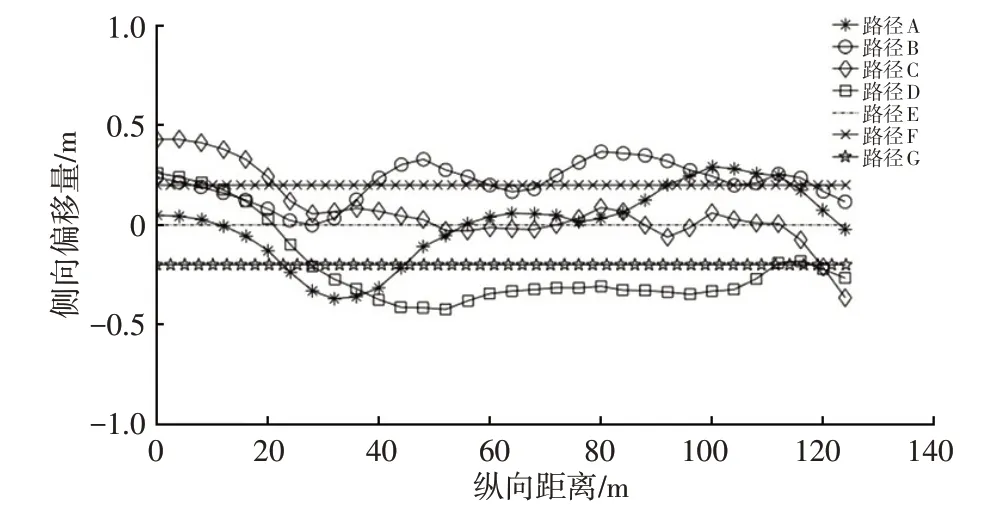
图8 评价试验中LCCS跟随路径
在图8中,路径E~路径G分别表示车道中心线及其向左、右偏移0.2 m的路径。将偏移量设为0.2 m是由于驾驶员在该段弯道行驶中偏移量在此范围内分布最密集。在评价试验中,如果相较于与道路中心线有固定偏移量的路径,LCCS 模仿驾驶员的驾驶路径未能得到较多驾驶员更高的认可,在设计个性化LCCS时,只需要考虑使LCCS根据不同驾驶员调整车辆相对车道线的侧向偏移量即可,反之,在设计个性化LCCS 时,就需要考虑如何根据不同驾驶员的特性调整车辆按照某种风格的驾驶员驾驶路径行驶。
4 主观评价试验
4.1 试验过程
主观评价试验的目的是研究车辆在RSOI中按不同路径行驶时,驾驶员是否会对某种行驶路径的喜好程度高于其他行驶路径,并研究驾驶员间是否存在差别。
共有20 名驾驶员参与试验,包括9 名在校学生和11名职业驾驶员,驾龄分布在3~20年之间,平均驾龄为7.2年。
试验场景与数据采集试验中的场景相同,纵向车速的控制策略与数据采集试验中相同,横向控制策略为:在场景中的RSOI 之外的路段时,车辆按照车道中心线行驶,当行驶至RSOI 时,车辆按照图8 中的7 种路径之一通过RSOI。
车辆沿着设计的场景行驶1 圈,会3 次通过RSOI,每次通过RSOI时的行驶路径由试验指导人员按照试验流程切换。车辆行驶1圈后,驾驶员评价出一个最喜欢的路径。
试验过程分为2个阶段,如图9所示,分别为喜好探索阶段和喜好验证阶段。在第1 个阶段,需要按照图9中的过程完成3 次评价试验。如果驾驶员清楚地知道自己喜欢什么样的路径,则路径Z即为驾驶员在7条路径中最喜欢的路径。如果LCCS控制车辆在弯道上如何行驶并不影响驾驶员对LCCS 的感受,则路径Z 是驾驶员随机评价出的一条路径,并不能代表驾驶员真实喜欢的路径。

图9 评价试验流程
喜好验证试验阶段,每名驾驶员需要进行10 次评价试验,每次试验的3 种行驶路径组合情况见图9,其中,Z为在第1个阶段试验中得到的驾驶员喜好的路径,路径A~G对应数字序号1~7,根据路径Z所代表的数字序号可以通过表格计算出其他路径的序号,当计算出的路径序号大于7 时,取其与7 的商的余数所代表的路径。若驾驶员在某次评价试验中选出了路径Z,则记一次正确选择,反之,记一次错误选择。
4.2 试验结果
图10所示为20名驾驶员在喜好验证试验过程中得到的正确选择的次数,从图10中可以看出,大多数驾驶员在验证试验中可以多次选到其在第1 个阶段选中的喜好路径,平均每名驾驶员可以给出8次正确选择。

图10 各驾驶员喜好验证试验结果
本文构建卡方检验以更充分地验证驾驶员能否准确辨别其喜好的路径。首先提出原假设,即驾驶员对于LCCS 行驶的路径不存在明显偏好,则每次选择喜好路径时,都只能从3 种不同路径中随机选择一种路径,因此按照喜好验证试验的规则,驾驶员有1/3的概率给出正确选择。本研究中共有20 名驾驶员参与试验,且每名驾驶员在验证试验中均需要进行10 次评价,按照上述假设,在验证试验中理论上可以得到67 次正确选择与133 次错误选择。通过卡方检验比较实际驾驶员表现与预设驾驶员是否差异显著。表1 所示为卡方检验表,定义原假设和备择假设如下:
H0:实际驾驶员与预设驾驶员没有区别,其喜好路径为随机选择结果。
H1:实际驾驶员与预设驾驶员存在显著差别,其喜好的路径并非随机选择结果,驾驶员可以将自己最喜爱的路径与其他路径区分出来。

表1 四格卡方检验表 次
根据试验中得到的评价数据,可以按照显著度a=0.05的检验标准拒绝原假设。
图11 所示为评价试验中选择7 种不同行驶路径作为最喜好路径的驾驶员数量的统计结果,从图11 中可以看出,在7种路径中没有可被大多数驾驶员选择为最喜爱的路径,其中,路径G 得到最多的驾驶员的喜爱,但也只有6名驾驶员,有8名驾驶员选择了可以代表驾驶员过弯风格的行驶路径,这表明仅通过设置行驶路径距离车道中心线的横向偏移量无法满足所有驾驶员的喜好。

图11 LCCS行驶路径喜好人数比较
通过评价试验发现,驾驶员对车辆在RSOI 内的行驶路径有明确的喜好,并且不同的驾驶员喜好的行驶方式不相同,很多驾驶员对于能够模仿驾驶员风格的LCCS 有明确的要求。因此,需要针对不同驾驶员选择合适的行驶路径,即设计驾驶员自适应LCCS。
5 结束语
本文在驾驶模拟器中采集11 名驾驶员在RSOI 上的驾驶路径,使用K-Medoids 算法提取4种代表路径作为评价试验中的样本,使驾驶员评价不同行驶路径中最喜欢的路径,并设计试验验证驾驶员评价数据的有效性,证明了需要根据不同驾驶员的喜好调整LCCS 的行驶路径。
在研究过程中发现,尽管很多驾驶员的自然驾驶路径被归类为A 和B,但是在评价试验中,选择路径A、B作为其喜爱路径的驾驶员却很少,这与文献[9]中得到的驾驶员喜好特性与其自然驾驶特性存在差异这一结论相符。根据分析,驾驶员的驾驶路径受到驾驶员的期望路径及其本身的驾驶水平和驾驶状态的综合影响,因此驾驶员自然驾驶路径无法完全反映其真实喜好。
本文的研究均在固定机座驾驶模拟器上完成,驾驶员无法完整感知到车辆的加速度等信息,采用实车完成主观评价试验会对验证结果有更大的支撑性。在构建本文的验证试验样本组时,未考虑控制不同路径的出现频次相同,这可能会对试验结果造成一定影响,在之后的类似研究中,需要关注该问题。
致 谢
本研究得到了JTEKT公司提供的资金和设备支持,并且该公司相关人员在论文相关项目中提供了重要帮助,在此表示衷心的感谢。另外,诚挚感激同济大学-JTEKT 联合实验室中为课题开展提供过重要帮助的陈佳琛博士和夏韬锴博士。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
北京航空航天大学学报(2022年8期)2022-08-31
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年4期)2022-03-07
汽车实用技术(2022年4期)2022-03-07
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
中学科技(2015年11期)2015-11-25
人民周刊(2009年12期)2009-01-25
