一种基于模型的下肢助力外骨骼混合控制策略
2021-04-14 03:10王立志王天铄郑天骄张宗伟朱延河
载人航天 2021年1期
马 舜,王立志,王天铄,郑天骄,张宗伟,朱延河,赵 杰
(哈尔滨工业大学机器人研究所,哈尔滨150001)
1 引言
外骨骼是能够增强和改善人体身体机能的穿戴式设备,基于拟人化设计,与人体具有相似的运动空间,能够跟随人体的运动,并提供助力承担负载,特别在一些车辆无法到达的位置,外骨骼具有独特的优势。
外骨骼的控制策略多种多样,目前比较经典的控制方法有预定轨迹控制、肌电信号控制、基于模型的补偿控制、灵敏度放大控制和自适应振荡器控制。这些控制方法都有各自的优缺点。预定义轨迹控制步态稳定,能够引导穿戴者以正确的步态进行行走,但是应用该种方法穿戴者需要适应外骨骼的步态,灵活性很难保证,往往应用于医疗康复型外骨骼;肌电信号控制方法能够直接通过肌电信号预测穿戴者的运动意图,使外骨骼灵敏快速地跟随穿戴者运动,但是肌电信号测量困难,信号不够稳定并且因人而异,使外骨骼测量系统复杂并且对人的适应性不强;基于模型的补偿控制利用动力学模型计算外骨骼当前状态下所需的关节力矩,能够起到一定的助力作用,但是难以建立精确的模型,其在灵活性和稳定性方面都存在较大的缺陷;灵敏度放大控制最早应用于BLEEX外骨骼,无需额外引入其他的传感器,能够在保证助力效果的同时实现较好的灵活性,但该方法抗干扰能力较弱,尤其是当灵敏度系数较大时很容易出现不稳定的现象,所以其跟随性能受限;自适应振荡器广泛应用于足式机器人的运动控制,能够产生平滑的节律运动,具有较好的环境适应能力,该方法近年来也开始被应用于一些医疗外骨骼的控制上,例如LOPES、FHAE主要应用自适应振荡器获取髋关节节律运动的周期、相位等特征,然后根据获得的运动信息计算关节所需的扭矩,但该种方法的灵活性不足,很少应用于能力增强型外骨骼上。
根据上述对比,可以看出尽管目前外骨骼的控制方法多种多样,但是仅凭单一的方法很难同时兼顾外骨骼的灵活性、稳定性和助力效果。因此本文提出一种基于动力学模型补偿、灵敏度放大和人机作用力跟随的混合控制策略,以期保证支撑腿助力效果的同时满足摆动腿对灵活性的要求。
2 支撑相的补偿控制策略
下肢助力外骨骼机器人在支撑相中的控制策略采用简化模型的灵敏度放大法,即不需在穿戴者自身或者人机交互力进行检测,只是在外骨骼本体基础上进行测量,通过控制器预测外骨骼的运动轨迹,从而使穿戴者受力很小。将外骨骼的运动角度与穿戴者对其施加的广义力之比定义为灵敏度系数,在运动角度一定时,系数越大,穿戴者越省力。
以外骨骼单关节为例,单自由度外骨骼系统的原理示意图如图1,外骨骼驱动关节的动力矩由穿戴者和电机一起提供,穿戴者提供的力矩越小,则说明单自由度外骨骼系统的助力效果越好。

图1 单自由度示意图Fig.1 One Degree of Freedom Diagram
在外骨骼自由度处加上驱动,如图2,电机的输出力矩根据外骨骼自身信息得到,则电机的输出力矩如式(1):

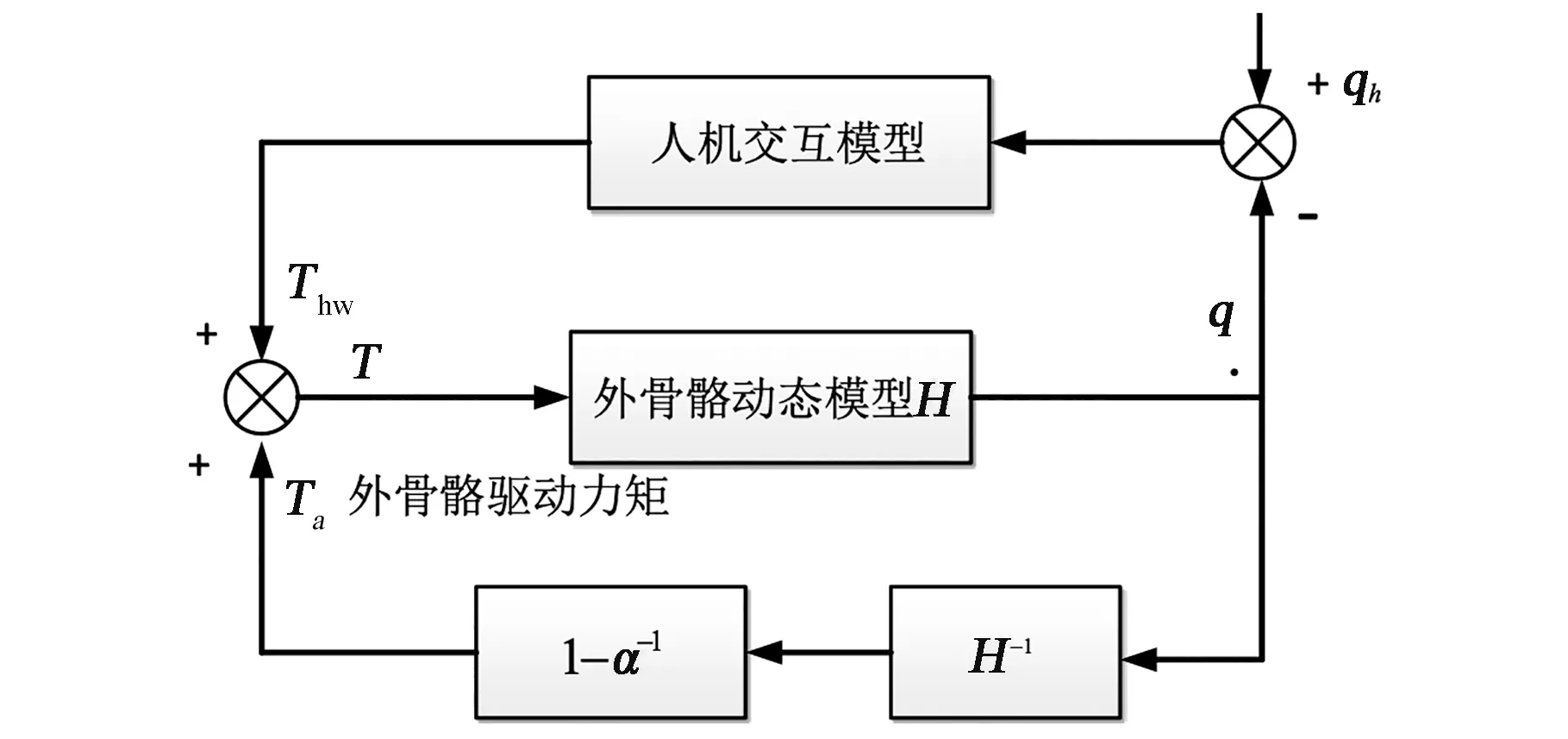
图2 人与电机提供外骨骼驱动力矩Fig.2 Driving torque provided by human and motors
穿戴者输出力矩如式(2):

其中,η为大于1的放大系数,H为外骨骼动力学模型。通过放大系数矩阵η的逆与动力学矩阵H的逆和角度矩阵q相乘计算各个关节的输出力矩为一组列向量。根据有电机的控制框图,得到灵敏度放大系数如式(3):
如果选择放大系数η=10,则穿戴者输出力矩变为原来的1/10,由此说明灵敏度放大法控制外骨骼可以有效降低穿戴者出力,降低能耗。

3 摆动相的力闭环跟随控制
灵敏度放大控制属于开环控制,若在摆动相中采用该方法,穿戴行进中,驱动关节时常伴有抖动导致系统不稳定。有外界干扰时,外骨骼会对人机交互以外的力进行响应,生成非穿戴者期望的运动轨迹,造成失稳。灵敏度放大法单纯地获取穿戴者的运动信息,通过各关节的角度传感器,检测到由交互力产生的机器人运动参数的改变,进而产生控制信号,使系统的驱动关节运动,进行人机跟随。但是穿戴者在外骨骼上施加人机交互力的具体数值系统控制器无法精确获得,导致外骨骼不能根据人机交互力的大小和外界负载的变化实时调整驱动关节的输出力矩,而只能根据穿戴者感知判断来调节相关参数。这种方法对系统动态模型的精确度要求非常高,而且没有反馈,无法判断系统的运动效果。同时,为了很好地响应穿戴者施加的人机交互力,控制器就需要很高的灵敏度放大系数,但过高的灵敏度放大系数会影响系统的鲁棒性。
力闭环策略在系统中引入力传感器间接测量推导出人机交互力,达到主动关节处运动趋势辨识的效果,通过控制该检测力的大小来控制外骨骼的运动,控制该作用力在很小的范围或使作用力为0,达到零力跟随的力闭环控制效果,原理如图3。

图3 零力跟随力闭环原理图Fig.3 Schematic diagram of closed-loop zero force follow ing
外骨骼的力闭环控制需要机器人系统的力反馈和运动反馈信息,其中的关键变量为目标人机接触力和目标运动参数。人机接触力是由穿戴者和外骨骼末端的位置误差产生,为达到良好的人机跟随运动效果,将目标人机接触力控制为0。外骨骼关节的动力学模型如式(4):

式中:C为科氏力矩阵,F为摩擦系数矩阵,G为重力项。在不考虑干扰项的情况下,外骨骼主动关节驱动的输出力矩T与穿戴者施加的关节力矩T就构成了外骨骼机器人所受的合力矩,力闭环的控制目标为期望的人机交互关节力矩为0,其中穿戴者施加的关节力矩如式(5):

式中:J为外骨骼的雅克比矩阵,f为人机交互力。根据设计主动关节驱动单元施加的广义力、外骨骼机器人的动力学模型、穿戴者于外骨骼间的人机交互模型,可以设计主动关节的输出力矩如式(6):

引入关于穿戴者作用于外骨骼交互力的PD控制,PD控制可以使超调变小,利于快速达到稳定,提高增益,响应速度快。通过PD控制后,主动关节的输出力矩为如式(7):

式中:K为比例系数,K为微分系数。
双量程检测模块如图4所示,测得的力f,可以看作是由于人机轨迹误差产生的,将人机交互模型看作式(8)~(9)所示弹簧模型:

式中:K为弹簧刚度系数,θ为外骨骼期望角度位置,即穿戴者角度位置。

图4 双量程检测模块受力应变与实物图Fig.4 Stress strain and physical draw ing of doublerange testmodule
将上述公式带入外骨骼动力学模型公式中,将穿戴者施加的人机作用力看作干扰项,将式(7)、(8)、(9)代入式(5)可以得到式(10):

式中,Δθ=θ-θ,为位置偏差;Δθ=θ-θ,为角速度偏差。即上述控制律能够实现力跟随,根据分析画出零力跟随的力闭环控制系统框图如图5。

图5 零力跟随力闭环框图Fig.5 Block diagram of closed-loop zero force following
4 下肢外骨骼试验测试
为验证下肢助力外骨骼控制策略设计的有效性,进行相关的单关节性能测试和承重蹲起测试,从而确定是否满足设计要求和预期效果。下肢外骨骼参考人体工程学和相关运动数据,采用拟人化的构型设计,如图6所示。在能够承受目标载荷的条件下,尽量减小整体质量和外形尺寸。外骨骼采用主被动结合的驱动方式,利用重力平衡原理平衡下肢自重,通过四连杆变速比的机构驱动主动关节,实现小自重、大出力的目的。
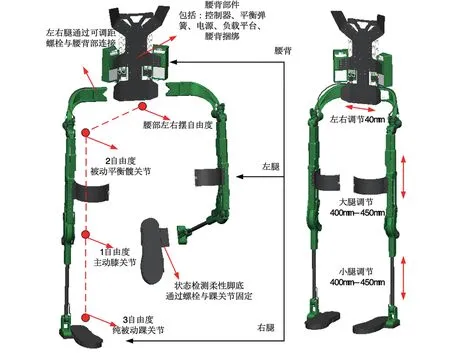
图6 外骨骼结构图Fig.6 Diagram of exoskeleton
外骨骼的硬件控制与传感系统如图7所示,其中各关节角度由角度编码器测量,人体穿戴外骨骼后与外骨骼紧密捆绑,外骨骼关节角度信息可近似表示人体关节角度信息,脚底压力由自制的脚底传感器测得。
4.1 单关节跟随性能测试
进行外骨骼跟随穿戴者进行膝关节摆动的试验。试验中,人穿戴下肢助力外骨骼,进行来回摆腿,通过人体带动机器人运动,外骨骼小腿跟随运动。采集角度和交互力检测模块的拉压力输出,绘制曲线为图8。

图7 外骨骼控制与传感系统 Fig.7 Control and sensing system of exoskeleton

图8 力闭环人机运动跟随实验曲线Fig.8 Experimental curve of man-machine movement follow ing
图中,下部曲线为交互检测的拉压力输出,单位为N。可以看出,在人体进行弯曲小腿的起始动作时,检测模块受到由于轨迹偏差产生的压力作用,偏离零位,从而将信号输送给控制器,控制膝关节跟随人体运动。当机器人跟上人体的运动时,人机轨迹偏差近似为0,此时检测模块的输出又变回零位。而伸展小腿起始时,检测模块受到拉力,同样跟随后,输出又返回零位。
4.2 蹲起过程支撑相控制效果测试
下肢助力外骨骼的主要目的是有效降低穿戴者的负重感。为了检验支撑相中基于模型的灵敏度放大控制效果,在人脚和外骨骼脚部加入一维压力传感器,测试穿戴外骨骼无承重、有承重时进行蹲起动作的足底压力变化;以及没有穿戴外骨骼时无承重和有承重时的足底压力变化。
人体在没有穿着外骨骼的情况下,进行原地蹲起和背负70 kg重物蹲起实验,脚底力采集如图9所示。受试者体重90 kg,双腿对称站立,所以脚底压力只对右脚进行分析。由于没有其他约束,站立时重心偏右,平衡状态压力50 kg,蹲起中经过先失重后超重的状态。当背负70 kg,由于负载约束,重心近似趋于中间,蹲起中平衡脚底力为80 kg,同样经过先失重后超重的状态。运动过程与压力分布合理。

图9 无外骨骼蹲起脚底压力采集 Fig.9 Squating foot pressure w ithout exoskeleton
穿戴外骨骼进行蹲起的动作,得到对应的压力分布曲线。对比无承重的理论值45 kg平衡状态,当依次背负30 kg、50 kg、70 kg的承重时,蹲起中,脚底压力平衡位置的压力值依次为48 kg、50 kg、53 kg。脚底压力曲线图如图10所示。由此说明外骨骼在支撑过程中,能够达到良好的助力效果,可以分担80%的重量。由于没有髋关节驱动,人体承重相对高些,但满足设计指标。蹲起支撑助力效果具体分析如下:当人体没有穿着外骨骼与穿着外骨骼进行无承重蹲起时,平衡状态都是45 kg,说明穿戴外骨骼对人体没有产生压力,没有负重感,束缚小;当承重70 kg时,对比有无外骨骼作用时的脚底压力。平衡状态分别为80 kg和53 kg,助力效率计算多次采集的平均值,为78%。超重过程中,峰值压力分别为125 kg和65 kg,助力效果显著,支撑相的控制算法有效。

图10 穿戴外骨骼蹲起脚底压力采集Fig.10 Squating foot pressure w ith exoskeleton
4.3 连续行走过程控制效果测试
试验中,在人脚和外骨骼脚部之间加入一维压力传感器,测试穿戴下肢助力外骨骼无承重、有承重时,进行连续行走足底压力变化,以及无外骨骼,人体正常行走时无承重、有承重的足底压力。测试结果如图11~12所示,无承重连续行走时,对比足底3点压力分布情况:没有穿着外骨骼时,脚跟压力相对较大;穿着外骨骼时,前脚掌压力相对较大。这是因为外骨骼脚部柔性达不到运动鞋的效果,导致脚底弯曲不明显,压力分布会有少许变化。而整体压力分布规律依然呈周期性变化,说明外骨骼对人体运动影响很小。当承重70 kg时,对比有无外骨骼作用时的脚底压力:压力变化范围分别为0~160 kg和0~112 kg,助力效率通过计算多次采集的平均值,达到约69%,助力效果显著。

图11 没有穿戴外骨骼连续行走脚底压力采集Fig.11 W alking foot pressure w ithout exoskeleton

图12 穿戴外骨骼连续行走脚底压力采集Fig.12 W alking foot pressure w ith exoskeleton
5 结论
本文将灵敏度放大控制和力闭环跟随控制相结合构建的控制策略,完成了关节跟随性能、负重蹲起和连续行走等试验测试:单关节跟随性能测试中,外骨骼可实现对膝关节摆动的零力跟随,力闭环控制算法有效;蹲起跟踪和连续行走控制测试中,外骨骼对人体运动影响很小,助力效果显著,支撑相算法有效;综上,本文提出的控制方法有效。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
新视线·建筑与电力(2021年4期)2021-11-01
新视线·建筑与电力(2021年2期)2021-09-10
家庭科学·新健康(2019年10期)2019-11-18
轻兵器(2019年5期)2019-06-21
小朋友·快乐手工(2017年9期)2017-11-09
现代兵器(2017年4期)2017-06-02
山东青年(2016年12期)2017-03-02
大众健康(2016年3期)2016-05-31
科学大众·小诺贝尔(2014年8期)2014-08-27