
无人机在高山区免像控三维建模航测方法研究
2021-04-15 15:55钱俊锦
中国新技术新产品 2021年3期
钱俊锦
(四川中水成勘院测绘工程有限责任公司,四川 成都 610000)
随着无人机航测技术的普及,利用无人机进行航测成图和三维建模的方法已经在数字城市建设、工程测量、不动产测绘、水利水电规划设计以及景点展示等多个领域得到了广泛应用。近年来,无人机行业发展迅速,从最初的人工飞行发展到自动飞行,再到厘米级定位、仿地飞行等,每一步的发展都极大地提高了传统测绘的效率。随着无人机厂商和软件开发商不断地对技术进行更新,利用小型无人机在复杂、困难地区进行大比例尺免像控测绘已经成为可能,该文对大疆精灵4RTK无人机在高山区使用免像控航测的方法进行研究。
1 测区概况
测区位于西部高原地区,需要测绘1∶1000三的维模型及地形图。测区地形属于高山区,面积约1.5 km2,海拔在3 000 m以上,区域内高差达400 m以上,地势陡峭;且人员在该区域内有较强的高原反应,种种因素给外业测量带来了较大的困难。由于地形原因,人员无法按照常规的航测作业方法布设像控点,即像控点无法控制整个测区,如果强制采用像控点作为约束条件进行空三,就可能会造成测区局部精度不能满足规范的结果;因此,经研究后决定该次测绘采用免像控作业方式,测区现场地形概况如图1所示。

图1 测区现场地形
2 无人机航测建模原理
通过无人机搭载的相机(可以是单镜头,也可以是多镜头)对目标区域按照一定的重叠率,从多角度拍摄多张影像,并通过提取影像上的二维特征点,根据不同影像匹配的同名特征点,用光束法将区域的网平差生成三维点云。建模软件把从不同视点拍摄的静态物体的数字影像作为输入,在几分钟/小时的计算时间(取决于输入数据的大小)内输出带纹理的高分辨率三角形网格,最终形成数字影像覆盖区域的实景三维模型。
3 作业流程
经过现场勘测,决定采用大疆精灵4RTK进行航测作业,整个作业流程如图2所示。
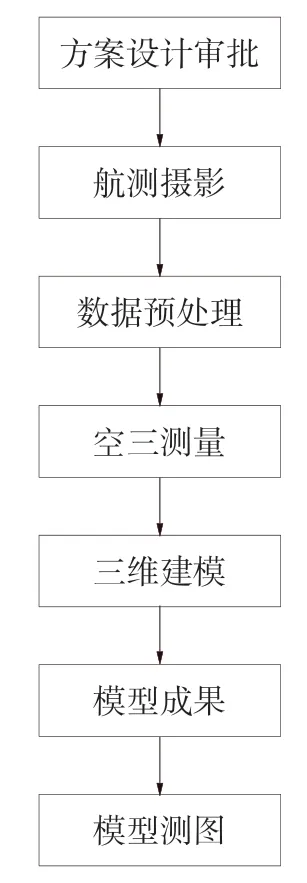
图2 航测作业流程图
3.1 大疆精灵4RTK无人机简介
大疆精灵4RTK无人机具有快速灵活、对起降场地要求低的特点,但同时由于航程较短,它也不适合开展大区域作业。该无人机配备了1英寸2 000万像素的相机CMOS,搭载了FOV 84 °和8.8 mm/24 mm(35 mm格式等效)镜头,其最大飞行高度为500 m,可以通过网络RTK(实时动态载波相位差分技术)或PPK(动态后处理技术)的方式实现厘米级定位,具备跟随地形进行仿地飞行的功能,特别适合在高差较大的地区开展高精度航测作业。
3.2 获取测区的DEM/DSM
由于测区高差很大(400 m),在采用定高飞行时,测区高程较高区域的重叠率和较低区域的分辨率将无法满足三维建模的要求;因此,为了保证飞行的重叠率和分辨率可以满足大比例尺地形图测绘的要求,应该采取无人机跟随地形进行变高飞行的方式进行航测,即仿地飞行。为了进行仿地飞行,就需要测区的DEM/DSM(数字高程模型/数字表面模型),通常来说,获取测区的DEM/DSM有以下2种方法:1) 先对测区进行1次低分辨率飞行,以最快的速度利用航测影像生成测区的DSM。其优点是地形精准,无人机飞行时能够有效地避开测区内高大的突出物;其缺点是必须先进行1次飞行,会影响工作效率。2) 根据各种公开发行的DEM数据,按照测区范围进行裁切。其优点是不需要先对测区进行飞行,能提高工作效率;其缺点则是DEM数据的实效性不高且无法判别测区内高大的突出物,会影响飞行安全。该航飞测区位于原始森林中,没有人为因素改变测区地形的情况,且无高大突出的建筑物,因此可以采用公开发行的DEM数据。经过对比,该次作业采用ALOS 12.5 m分辨率的DEM作为仿地飞行的DEM。
ALOS是日本宇宙航空研究所(JAXA)的高级陆地观测卫星-1(Advanced Land Observing Satellite-1,ALOS)项目。ALOS-12m地形数据来源于ALOS的PALSAR传感器。2006年~2011年,PALSAR的L波段合成孔径雷达(SAR)产生了大量的全天候观测成果。ALOS PALSAR RTC数据集产品自2014年10月开始发布,一年后完成。项目中包括除南极洲、格陵兰岛、冰岛和欧亚大陆北部以外的地球上所有陆地区域的精细波束(FBS、FBD)和极化(PLR)数据。
获得DEM数据之后,将DEM数据导入无人机遥控器中,就可以在遥控器中对仿地飞行的航线进行规划。
3.3 外业检查点布设
虽然该次航飞采取免像控的方式,但是为了保证检查成果的精度,还需要在测区布设检查点;共布设6个平面检查点和90个高程检查点。平面检查点利用了固定地物和提前布设的对空标志,分布于测区内人员可以到达的区域和测区中部区域,布设样式为“L”型[1],点位间距约600 m[2]。采用对中杆将GPS设备精确对中之后测量3个测回,每个测回平滑采集30次,测回间GPS设备断开重连。高程检查点则在测区内人员能够到达处随机采用RTK进行测量,每个高程检查点平滑采集10次,平面检查点分布如图3所示。
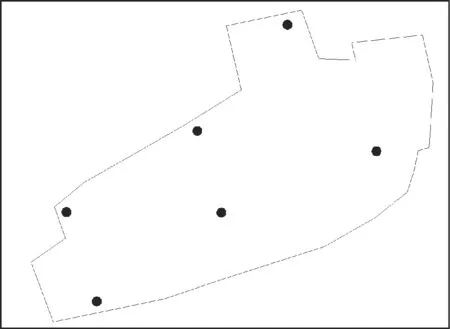
图3 平面检查点分布
3.4 无人机航飞
大疆精灵4RTK自带千寻网络RTK服务,可以在千寻知寸FindCM的覆盖区域实现厘米级定位,由于测区位置比较偏远,且飞行区域的地形较为复杂;因此,为了防止出现因网络和遥控器失联等因素造成无人机丢失RTK定位信息的情况,测绘人员在地面架设了静态观测基站,从而方便进行后期PPK解算。架设静态观测基站之前,首先利用千寻或省级cors(连续运行卫星定位服务参考站)服务测量静态观测基站点的经纬度,然后架设静态基站并按照1 Hz以上的采样速率进行静态观测,需要注意静态观测时长必须大于飞行时长,且飞行过程中静态观测不能中断。根据地面分辨率和飞行高度,可得表达式如公式(1)所示。

式中:H为飞行高度;f为相机焦距;a为像元大小;GSD为地面分辨率。
计算结果要满足1∶1000建模精度的要求,飞行高度不能高于350 m。由于测区高差太大,因此从起飞点起飞超过220 m的飞行高度就会超过大疆无人机500 m飞行高度的限制,为了保证作业成果的质量和飞行安全,最终确定采取相对航高200 m进行仿地飞行。
该次无人机航飞作业的主要参数见表1,航线如图4所示。
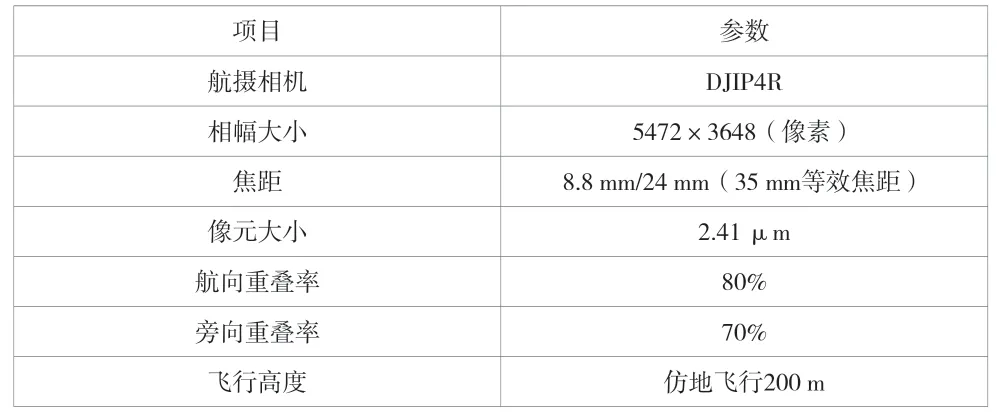
表1 航测参数

图4 仿地飞行变高航线
3.5 内业处理
该次作业共拍摄了644张影像,有效覆盖范围1.73 km²,测区被完全覆盖并有一定的多余影像,有利于提高测绘的质量。内业处理时,根据静态观测的数据,以静态观测基站点的经纬度为基准,对无人机记录的原始观测数据进行解算,从而得到厘米级定位的高精度无人机航拍影像pos(外方位元素中的线元素)数据。在得到高精度的pos数据之后,利用Photoscan空三结合ContextCapture完成三维建模。Photoscan是由俄罗斯Agisoft公司开发的1款软件,它可以快速自动化处理无人机的航测影像,具有操作简便、空三精度高的特点,但其三维建模的效果一般。ContextCapture(原smart3D)则可以根据航测影像自动化生成具有真实纹理的实景三维模型,其生产的三维模型具有效果好、通用性强的特点,但其空三处理能力较弱。因此结合二者的优点对影像进行处理,成果处理的具体作业流程为:将航拍影像导入Photoscan中,再导入pos数据进行空三处理;由于pos为厘米级定位,因此在Photoscan中将pos的精度设置为0.05 m,空三处理完成之后导入平面检查点进行精度检查,整个过程中平面检查点不参与空三运算,只对精度进行检查。在Photoscan完成处理之后将空三结果以Blocks Exchange(*.xml)的格式导出,随后在ContextCapture中导入该空三成果,导入完成之后就可以开始进行三维建模,最终形成的三维模型效果如图5所示。

图5 三维模型局部效果
3.6 精度检查
该航测成果的三维模型平均地面分辨率为6 cm,满足1∶1000地形图测绘的要求。航测中,共布设6个平面检查点,由于检查点数量不足20个,因此根据《测绘成果质量检查与验收》规范的规定,按照其误差的算术平均值计算检查点中的误差。根据Photoscan的空三报告得出精度统计,见表2。
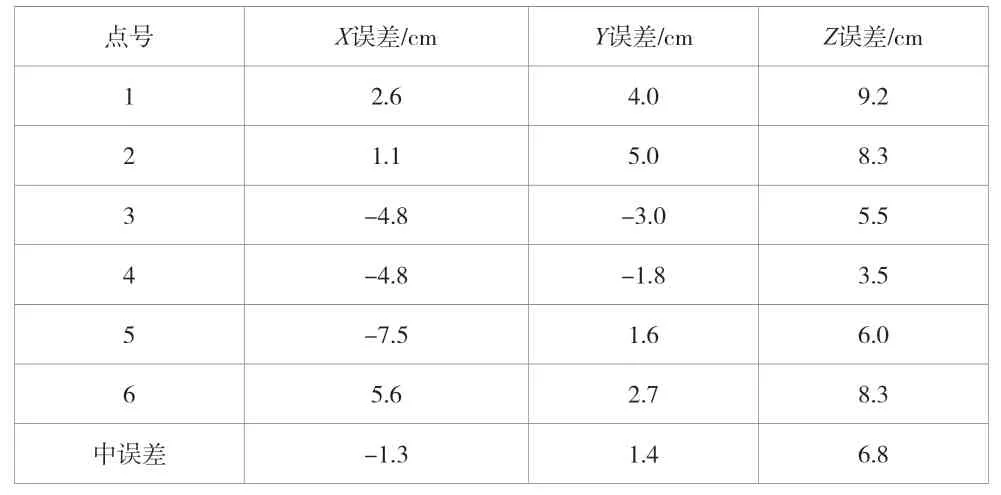
表2 平面检查点精度统计
在进行精度比较时,将平面检查点看作地物点。根据《工程测量规范》,地物点的点位中误差限差为图上距离0.8 mm(一般地区),则1∶1000地形图的实际距离限差为80 cm。由精度统计表可以看出,平面检查点的中误差满足规范的要求。
航测中共有90个高程检查点,检查方法为在ContextCapture中将航测成果按照0.2 m的间距输出为las点云,再在Microstation软件中比较las点云和高程检查点的高程差。由于检查点数量大于20个,根据《测绘成果质量检查与验收》规范的规定,计算点位中误差的表达式如公式(2)所示。

式中:M为中误差;n为检查点个数。
统计之后得出高程检查点的精度统计情况,见表3。

表3 高程检查点精度统计
根据《工程测量规范》,地形为山地时,高程检查点的中误差限差为等高距的2/3倍,1∶1000地形图等高距为1 m,则限差为0.67 m。经统计,高程检查点的中误差为0.11 m,满足规范的要求。
4 结语
在山区进行地形测绘或无人机航测时,地形、测区环境等因素会给大比例尺地形图测绘和高精度航测建模带来很大的困难,采用免像控的作业方式,就可以极大地提高工作效率。采用免像控的方式应该注意以下4点:1) 由于山区地势陡峭,如果采用定高飞行的方式,航测成果的分辨率和重叠度等很难满足建模的要求,如果不同区域的影像重叠度差别过大,也会影响空三的精度,因此要在山区无人机作业中实现免像控,必须采用仿地飞行的方式。2) 利用大疆精灵4RTK进行仿地飞行时,需要注意开启无人机的RTK定位功能,如果不开启,仿地飞行时将不会按照预设的航高进行飞行,就可能会导致分辨率不能满足测量的要求。3) 要确保pos的精度,即使有网络RTK信号覆盖,为了避免中途可能出现的因网络或遥控器失联等因素造成RTK 信号丢失的情况,也应该采取ppk模式对观测数据进行差分处理。4) 当内业空三处理时,在Photoscan中进行空三之前,应该将pos的精度设置为厘米级,如果采用软件默认设置的精度进行空三,成果将无法满足对精度的要求。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
河北地质(2021年4期)2021-03-08
写真地理(2020年39期)2020-12-23
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
中国铁道科学(2019年5期)2019-10-19
国际呼吸杂志(2019年4期)2019-03-12
测绘通报(2018年10期)2018-11-02
