SolarPV 3D在光电建筑中光伏发电系统设计时的应用研究
2021-04-28 09:51白建波丁俊杰
太阳能 2021年4期
李 建,白建波,丁俊杰,王 跃
(河海大学机电工程学院,常州 213022)
0 引言
光电建筑将光伏发电系统与建筑集成在一起,在减少能源消耗的同时也节约了土地资源,高度契合建筑近零能耗的全球发展趋势[1]。近几年,我国能源生产和消费革命、绿色发展和“碳达峰”“碳中和”目标等国家战略的提出与实施,为光电建筑这种建筑形式带来了更大的发展空间。
在进行光电建筑设计仿真时,工程设计人员通常将建筑模型的复现和光伏发电系统性能模拟分开操作,但这种重复建模的过程易导致输入的信息不一致,费时又费力。传统的光伏发电系统性能模拟软件,例如PVsyst和SAM软件等,虽然适用于光伏发电系统性能仿真,但并未很好地解决可视化设计的问题[2]。
目前,国外已经出现了一些光伏发电系统三维数字化设计软件,比如SolarEdge公司开发的网页版光伏发电系统性能仿真软件SolarEdge Designer,该软件拥有简洁的设计界面,并提供了良好的人机交互功能。Skelion是一款基于SketchUp软件的光伏发电系统仿真设计插件,实现了屋顶和复杂地形情况下的光伏组件自动化布置,并且Skelion生成的模型可导入PVsyst软件中进行精细化仿真。Trace Software公司开发的ArcheliosTMPro软件可在光伏发电系统设计过程中快速对比不同方案的设计结果,以使发电收益最大化。FTC Solar公司基于SketchUP软件开发了SunDAT软件,其在实现光电建筑的三维设计与光伏阵列自动化布置的同时,相较于其他光伏发电系统仿真设计软件,丰富了电气设置功能和CAD图纸导出功能。但目前国内尚无真正意义上的光电建筑设计软件,对此,本文自主开发了一款基于SketchUp软件的三维数字化设计插件SolarPV 3D,并对该插件的光伏阵列自动化布置算法和逐时阴影遮挡计算方法进行了介绍,然后以河海大学常州校区英才楼为例进行了光电建筑中光伏发电系统的可视化设计与性能仿真。
1 SolarPV 3D的介绍及其主要算法
1.1 SolarPV 3D的介绍
SolarPV 3D是一款自主研发的基于SketchUp软件的插件,其在对光电建筑中的光伏发电系统进行建模时具有以下功能:1)可实现建筑和光伏组件的精细化建模,并实现了光伏阵列的自动化布置;2)可进行逐时阴影遮挡和年平均有效太阳辐照量计算;3)可对光伏发电系统发电量进行评估,并对其经济性进行分析;4)光伏发电系统设计完成后,该插件能为设计人员提供详尽的关于光伏发电系统设计方面的PDF文档。
1.2 光伏阵列自动化布置算法
本文采用的光伏阵列自动化布置算法是由传统的区域填充算法改进而来,主要涉及以下8个步骤:
1)获取光伏阵列布置平面外轮廓多边形各边的数据,包括每条边的纵坐标最小值及最大值ymin和ymax、每条边的斜率k、每条边的截距b;将这些数据存入边表(ET)中,并找出ET中的纵坐标最大值Ymax和最小值Ymin。
2)建立平行线y=a,平行线初始值a=Ymin,平行线循环初始值i=0,且i的取值范围为[0,∞)。
3)若平行线a的值不大于Ymax,则循环扫描平行线。
4)提取平行线a与多边形相交的线段在ET中的数据,组成活性边表(AET),并保存平行线a与多边形相交线段的交点坐标;根据交点坐标生成顺序,依次读取两两一组的交点,每2个交点之间的距离为光伏组件可放置区域。
5)在光伏组件可放置区域内,结合相邻2个光伏组件的左右间距d1和单个光伏组件横向长度Ph,可计算得到光伏组件可放置区域之间的内点个数和内点横坐标,内点个数为可放置的光伏组件个数,内点横坐标为光伏组件放置位置的横坐标,再结合纵坐标a,可以根据此次的扫描结果得到光伏组件放置位置的坐标。
6)若i为奇数或i=0时,则在此次扫描的平行线值的基础上增加1个光伏组件纵向长度Pv,然后再次进行扫描;若i为偶数且大于零,则比较前2次扫描后得到的内点个数,内点个数少的扫描结果为最终的光伏组件放置位置的坐标,在此次扫描的平行线值的基础上增加1个光伏组件的前后排行间距d2,然后令i=i+1。
7)判断平行线a的值是否大于Ymax,若为“是”,则结束;若为“否”,则继续循环。
8)输出所有最终的光伏组件放置位置的坐标,进行光伏组件的自动化布置。
光伏阵列自动化布置算法的流程图如图1所示。

图1 光伏阵列自动化布置算法的流程图Fig. 1 Flow chart of automated layout algorithm of PV arrays
1.3 逐时阴影遮挡计算方法
射线检测技术在多个领域中都得到了广泛应用,包括利用射线测距、利用射线检测电子元器件是否失效等。本文在SketchUp软件中结合射线检测技术构建了光伏阵列逐时阴影遮挡比例分析模型。光伏阵列阴影遮挡示意图如图2所示。

图2 光伏阵列阴影遮挡示意图Fig. 2 Schematic diagram of shadow shading of PV arrays
光伏组件一般都是由规则的平面或曲面组成,当发生阴影遮挡时,光伏组件表面会部分或全部被阴影覆盖,若将光伏组件的长、宽分别进行等分,其表面将被分成多个小的长方体区域,并在每个长方体区域内设置1个检测点。阴影遮挡比例计算的精度可根据光伏组件长、宽的等分数量进行调整,等分数量越少,精度越低。由于射向光伏组件的光线是由SketchUp软件内置的仿真太阳发出,能考虑到所有会对光伏组件产生遮挡的场景,因此提高了软件仿真阴影遮挡的效果和精度。
2 应用案例分析
2.1 建筑模型复现及光伏阵列自动化布置
以河海大学常州校区英才楼的屋面为例进行光伏发电系统的仿真设计。利用无人机拍照三维成像技术并采用SketchUp软件对该建筑进行复现,得到的直观的三维建筑模型图如图3所示。

图3 SketchUp软件生成的三维建筑模型Fig. 3 3D building model generated by SketchUp software
选择图3中的2个楼顶作为光伏阵列的布置区域,分别设为区域1和区域2,这2个区域预设的光伏发电系统总装机容量为60 kW;光伏组件选择天合光能股份有限公司的型号为TSM-320PEG14的多晶硅光伏组件;使用SolarPV 3D推荐的全年最优光伏阵列倾角和方位角,分别为22°和0°;光伏支架上相邻2个光伏组件的左右间距d1设置为0.05 m,前后排光伏组件的行间距d2设置为1.48 m。光伏阵列具体的参数设置界面如图4所示。
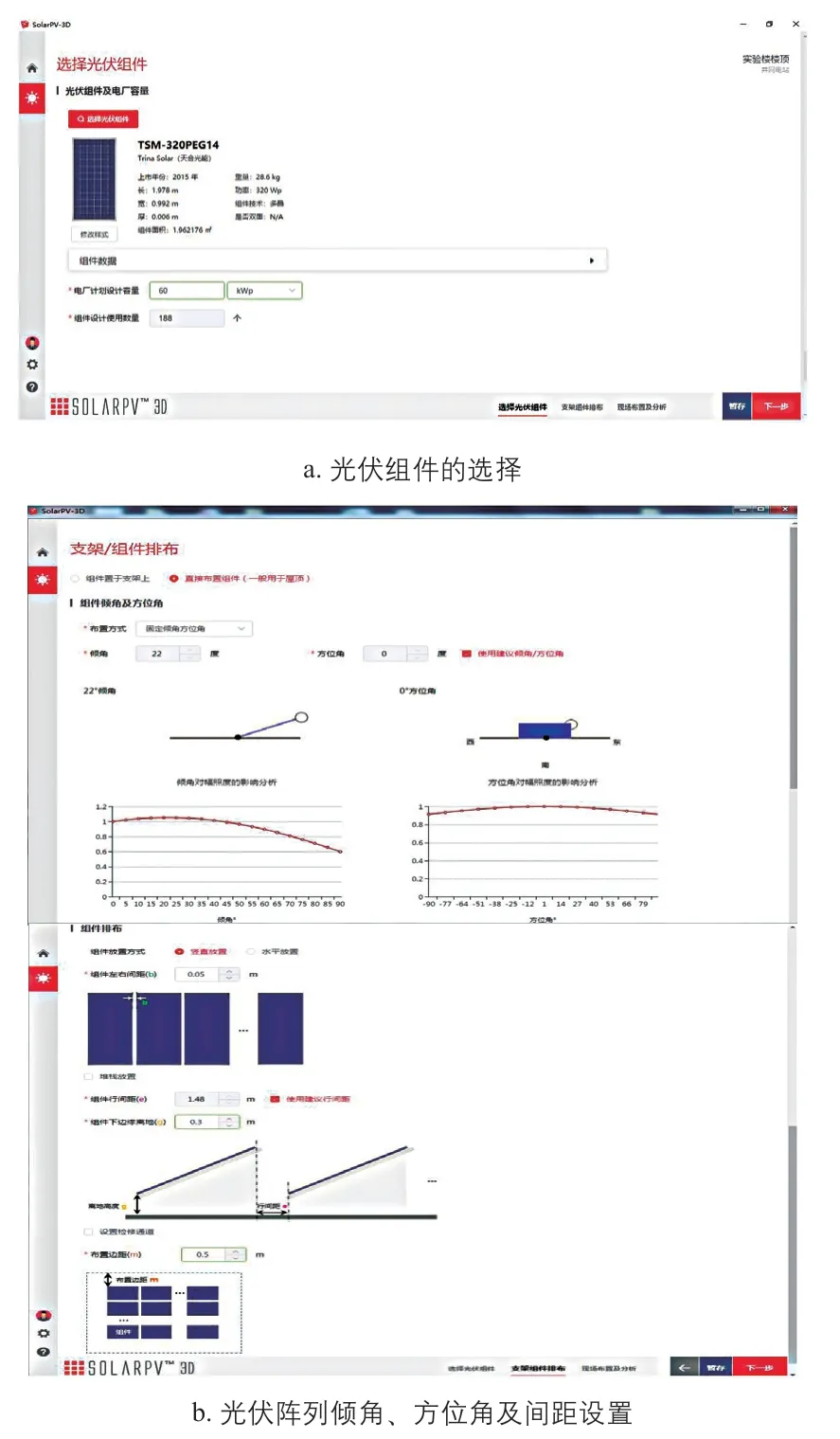
图4 光伏阵列的参数设置Fig. 4 Parameter setting of PV arrays
按照上述参数根据SolarPV 3D中的光伏阵列自动化布置算法对区域1和区域2进行光伏阵列布置。光伏阵列布置完成后的近景和远景效果图如图5所示。
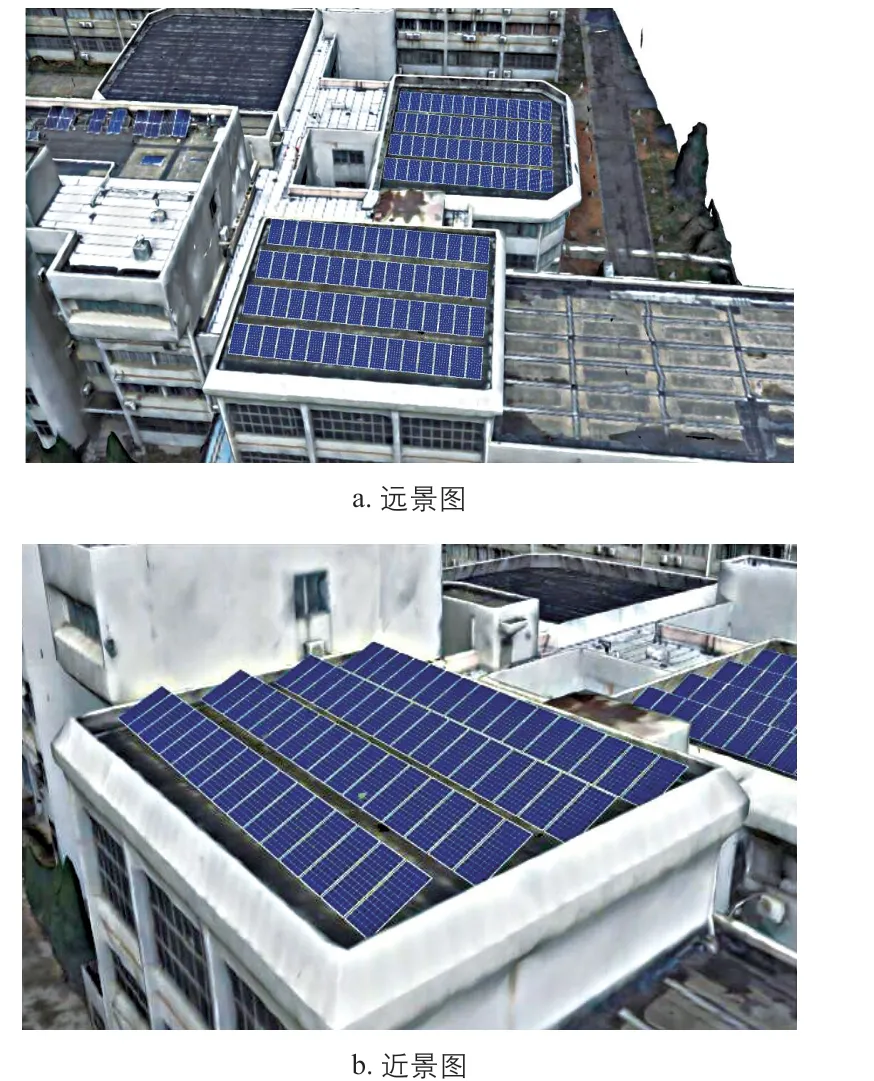
图5 光伏阵列布置效果图Fig. 5 Effect drawing of PV arrays layout
根据上文中的逐时阴影遮挡计算方法,可计算得到光伏阵列2020年全年的阴影遮挡比例,然后结合太阳辐照量模型HDKR,可得到光伏组件年平均有效太阳辐照量,用户可根据年平均有效太阳辐照量筛选光伏组件,若某块光伏组件接收的年平均有效太阳辐照量低于在SolarPV 3D中设置的某一阈值时,该光伏组件将会被自动删除。筛选界面的参数设置和光伏组件筛选后的光伏阵列效果图如图6所示。


图6 筛选界面的参数设置及光伏组件筛选后的光伏阵列效果图Fig. 6 Parameter setting of screening interface and effect drawing of PV arrays after PV modules screening
2.2 光伏发电系统的全年发电量分析
本文采用的多晶硅光伏组件的额定功率为320 W,根据逐时阴影遮挡分析结果,剔除年平均有效太阳辐照量低于设置的某一阈值的光伏组件后,光伏阵列剩余光伏组件的数量为114个,但考虑到逆变器连接的光伏组串数量最优,因此真正参与光伏发电系统发电量计算的光伏组件数量为110块,区域1和区域2内的光伏发电系统的实际总装机容量为35.20 kW。选用华为科技有限公司生产的型号为SUN2000L-4.95KTL-JP[202]的逆变器,额定功率为4950 W。光伏阵列中每11块光伏组件串联为1串,然后将组串进行并联,共得到10个并联组串,配置在6台逆变器上。
由于光伏发电系统发电量会受内部能量传输过程中各种损失的影响,因此需对光伏发电系统中能量传递过程进行分析。根据光伏发电系统中各种能量的传递过程建立了光伏发电系统能量传递模型,其中包括太阳辐照模型、光伏组件模型、直流端部分的线损模型、交流端部分的线损模型、逆变器模型;并引入逐时气象数据,考虑各种损失对能量传递的影响,并可对各个环节的能量进行仿真计算[3],光伏发电系统中的能量传递过程如图7所示。
SolarPV 3D考虑阴影遮挡及上述能量传递中的各种损失后,可计算得出逆变器年总输出电量为38158.18 kWh,光伏发电系统的年总并网电量为38075.63 kWh。光伏发电系统首年逐月发电量情况如图8所示,光伏阵列及逆变器各月的发电量情况如表1所示。

图7 光伏发电系统中的能量传递过程Fig. 7 Energy transfer process in PV power generation system

图8 光伏发电系统首年逐月发电量示意图Fig. 8 Diagram of monthly power generation of PV power generation system in the first year

表1 光伏阵列及逆变器各月的发电量情况Table1 Monthly power generation of PV arrays and inverters
3 结论
本文介绍了一款自主研发的基于SketchUp软件的三维数字化设件插件SolarPV 3D,并将其应用于河海大学常州校区英才楼的屋面光伏发电系统的设计,得出以下结论:
1)将SolarPV 3D与无人机拍照三维成像技术及SketchUp软件进行结合,实现了光电建筑中光伏发电系统的三维数字化设计,使整个设计流程直观化、可视化;基于射线检测技术的光伏阵列逐时阴影遮挡算法提高了光伏发电系统的发电量仿真精度,为光伏发电系统的可行性判断提供了更可靠的数据支撑。
2)相对于传统的光电建筑设计,SolarPV 3D的光伏阵列自动化布置算法省去了繁琐的重复建模工作,布置参数可快速准确调整,极大提高了工程设计的效率和仿真精度。根据SolarPV 3D中设置的年平均有效太阳辐照量阈值来筛选光伏组件的功能,可自动删除不符合工程要求的光伏组件,提高了光伏发电系统设计的经济性和实用性。
猜你喜欢
能源工程(2022年2期)2022-05-23
太阳能(2022年1期)2022-03-05
商用汽车(2021年4期)2021-10-13
故事作文·低年级(2021年4期)2021-05-06
舰船科学技术(2021年12期)2021-03-29
文苑(2020年11期)2020-11-19
中国诗歌(2019年6期)2019-11-15
中学生数理化·七年级数学人教版(2017年2期)2017-03-25
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
初中生世界·七年级(2017年1期)2017-01-20