
不同渗透率下自动驾驶混合交通流在天气条件影响下的通行能力建模
2021-04-28 19:28施磊刘东俭陈海建
时代汽车 2021年8期
关键词:自动驾驶
施磊 刘东俭 陈海建


摘 要:随着世界范围内对自动驾驶汽车及其相关产业发展的高度重视,自动驾驶车辆上路已成为重点领域协同创新、构建未来交通系统的重要载体。本文主要研究自动驾驶车辆不同渗透率参与的混合交通流受场景天气条件的耦合影响因素下的复杂车辆行为逻辑分析,影响机理解析,跟驰模型及通行能力模型构建等。最后我们通过SUMO仿真实验对模型进行嵌套及分析,以期对自动驾驶汽车在测试及上路引导中起到重要理论决策依据。
关键词:自动驾驶 混合交通流 天气影响 交通仿真
Autonomous Driving Mixed Traffic Flow under Different Penetration Rates under the Influence of Weather cConditions Capacity modeling
Shi Lei Liu Dongjian Chen Haijian
Abstract:As the world attaches great importance to the development of autonomous vehicles and related industries, autonomous vehicle launch test gradually becomes an important carrier for collaborative innovation in key areas and the construction of future transportation systems. Our paper mainly studies the logic analysis of complex vehicle behavior in the mixed traffic flow with autonomous vehicles under different penetration rates, considering the coupled influence factors of the scene weather conditions. We also analyze its influence mechanism, the construction of the car-following model and the capacity model for the mixed traffic flow with autonomous vehicles. Finally, we simulate and analyze the above models through the SUMO simulation experiment, which plays an important theoretical basis for the test and road guidance of the automatic driving vehicle.
Key words:autonomous vehicle, mixed traffic flow, weather factors, traffic simulation
1 自動驾驶车辆参与下的混合交通流模型构建
目前,自动驾驶汽车已成为全球汽车产业发展的战略制高点。在自动驾驶汽车测试及上路初期不可避免的会存在自动驾驶车辆与人为驾驶车辆均存在的混合交通流。在该阶段,原有的传统交通理论模型会失去效力,人为驾驶员的感知决策行为也会因为自动驾驶车辆的出现而发生改变。因此,本文针对自动驾驶混合交通流下复杂车辆行为与车车间互相影响关系,提出基于车辆高精度动力学下的混合交通流基本模型,建立自动驾驶汽车混入后的交通分析方法。从自动驾驶和人为驾驶车辆动力学出发,结合了车辆特性,构建其在混合交通流中的行为模型与微观混合流跟驰模型。
1.1 自动驾驶车辆特征行为分析
针对自动驾驶车辆参与的混合交通流进行模型构建时,首先应该考虑与传统道路的区别:当交通流的密度较大时,车辆之间的行车间距减小,道路上车辆的行驶状态都受前车行驶状态的约束,人为驾驶员只能主观判断前方单车或局部车组提供的信息来调整自车运动状态,由于驾驶员在车辆跟驰行为中对行车安全性的反应敏感度不同,车辆之间的跟驰行车间距也表现出差异性。而在自动驾驶环境下,由于存在车车通信、车路协同,降低了“人”所产生的在交通理论研究过程中出现的随机性、不确定性和差异性,提高了交通系统对于周围环境的主动反应水平。同时,针对具体的场景进行模型参数建立时,应考虑到实际路况的多变性,在假设中应尽可能使变化范围增大。当具体的自动驾驶车辆参与在交通流中,人为驾驶员在遇到自动驾驶车辆时的行为准则和反应会与常规人为驾驶有较大区别,因此车辆的跟驰模型还需要进一步优化。
1.2 混合流优化跟驰模型构建
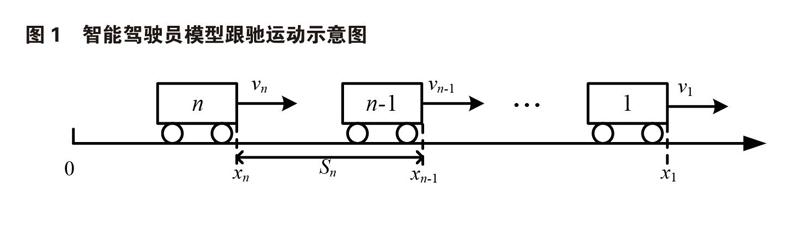
综合上述特征行为,本文改进了传统的模型。引用Treiber和Helbing两位学者借鉴牛顿力学的思想提出了社会力(Social Force)的概念[1],认为车辆的加速度可以看作是源于驾驶者期望提速的“动力”和前方车辆阻碍形成的“阻力”的综合影响。基于此,在智能驾驶员模型(Intelligent Driver Model,IDM)的基础上,再进行进一步优化,具体模型表达式如下:
其中:—理想驾驶速度;
—期望间距;
—静止安全距离;
—安全时间间隔;
a—起步加速度;
b—舒适减速度。
传统IDM模型考虑了期望速度、期望间距、前后车速度差等多因素对跟驰行为的影响,模型描述的跟驰行为能够较好地符合实际情况。此外,IDM模型还具有所含参数物理意义明确、易于标定及优化的特点。因此,该模型较为灵活适用,也可以具体的结合自动驾驶混合流车辆进行调整和优化。
在此基础上,考虑观察到前方车辆或侧方车辆为自动驾驶车辆时,原安全距离公式调整为:
d
其中h是常数,指有人驾驶车辆的车头时距,Vt表示车辆在t时刻的车速,d表示当前车车头与前车车尾之间的间距,li表示车身长度。
用IDM和CACC跟车模型对自动驾驶车辆的跟驰行为进行量化[2]。与IDM相比,CACC模型基于真实的车辆轨迹数据,更能捕捉CAVs的以下特性。因此,自动驾驶车辆的跟驰模式如下式所示:
式中,为前一控制时间的速度;
e为实际车距与期望车距之间的误差;
为e的导数形式;
为最小安全距离;
为期望车头时距;
和d为控制参数。
在导出上式中的速度后,可得到混合流跟驰模型下自动驾驶汽车的期望加速度计算公式,如下式所示:
由此在具体的自动驾驶车辆下的跟车模型中车辆的基本速度,加速度,形式方式,有了最基本的模型界定。根据对于真实交通流中的车辆分析及仿真实验中的结果对优化混合流跟驰模型进行了标定,在改模型的最佳参数为=0.01s,=0.45s-1,kd=0.25。
2 基于场景因素耦合影响下的通行能力分析
与传统汽车运行方式不同,自动驾驶车辆参与下的混合流中具体车辆的性能表征及其行为方式会有明显的感知特异性,在自动驾驶初期,这一现象会更加扩大。这是人为驾驶车辆、自动驾驶车辆、道路交通环境三者相互耦合的结果,传统的单一工况的道路交通模型在目前的混合流中并不适用,还需要针对各种不同的典型场景。因此,关于混合交通流整体道路区域内的通行能力推导,不同道路环境条件下整体交通运行状况的解析,车辆在不同渗透率下标准当量的需求分析,是进行自动驾驶车辆测试和上路投放的重点研究方向。
2.1 混合流优化通行能力模型构建
选择考虑采用改进形式的速度优化模型(FVD),结合交通分配法与割集法的功能特点,主要考虑其模型形式较为灵活,可以适应不同场景气候条件下的场景变化,同时对于驾驶单位的变化更为明显,如下式所示:
式中,k和λ是灵敏度系数;
是当前车辆和前一车辆车头时距;
是当前车辆的速度;
是速度的导数形式;
是当前车辆和前一车辆之间的速度差;
是车辆长度;
是优化的速度函数,如下所示:
式中,为自由流速;
α为敏感参数;
为最小安全距离。
对于整体交通流而言,将优化速度函数带入加速度公式,可以得到改进的FVD的期望加速度计算公式,如下式所示:
上式中的参数值根据道路的实际情况与环境内容,投放比例相互协调,在基本假设中的基本情况下,根据上式结合仿真结果最优化标定自动驾驶车辆行驶具体参数为=33.0m·s-1,=2.46m,k=0.629s-1,λ=4.10s-1,α=1.26s-1,L=5.0m。
同时,根据不同混合流中自动驾驶车辆渗透率对于整体交通流的影响,在行驶过程中假设在某个固定的时段,有k辆自动驾驶车辆行驶通过,则在某个断面内,出现自动驾驶车辆的概率应为:
因此对于预估车头时距应为可能出现的概率的数学期望并进行累加
其中hk(n)为整体测试混合流路段在投放n辆车辆中有k辆自动驾驶车辆时的平均车头时距。并对Ak进行矩阵形式的累加。计算所得自动驾驶车辆出现的数学期望应为:
故计算的车头时距应为:
K,n为混合流道路中的自动驾驶车辆渗透率
为自动驾驶车辆间车头时距
为自动驾驶车辆与人为驾驶车辆的车头时距
为人为驾驶车辆间车头时距
整体混合流路段中通行能力如下式所示:
然而显而易见的,对于该通行能力表达式而言,车辆的具体渗透率,车道运行的划分,以及其他客观、主观因素都会对该模型进行影响。
2.2 天气场景影响变化
不良天气将会导致的道路容量不足和交通运行效率降低,会加剧路网交通供需矛盾。在自动驾驶汽车参与的混合流下,这一变化将会发生改变。研究不利天气条件下的混合交通流特性,掌握不同渗透率下恶劣天气对混合流通行能力的影响,有利于优化测试区域内的混合流通行能力模型,从而对自动驾驶车辆投放进行科学有效的交通管理措施和应对预案,保障混合流路段的安全高效。研究结果表明,降雨条件下,受到路段线形复杂化、车道增多以及路段出入口车流干扰等因素的影响,道路通行能力受到车辆本身因素制约,有不同程度的降低,其中复杂线形路段人为驾驶员受到的影响最为明显。降雪条件下由于能见度的下降和地面摩擦系数的急剧减小导致道路得通行能力出现明显变化,行驶速度减小,车辆减速能力明显下降。大雾天气下由于能见度的急剧下降,人为驾驶车辆对于环境得判断能力明显减弱,对于正常行驶车速造成重大影响。基于此,构建整体的影响评估模型如下:
其中,为整体道路通行能力
,为天气影响下的混合流路段中为正常情况下的自动驾驶车辆/人为驾驶车辆影响比例系数。与车辆比例及道路条件等因素相关。
为正常情况下的自动驾驶车辆/人为驾驶车辆的标准道路通行能力
,,,,为天气条件影响下的自动驾驶车辆/人为驾驶车辆性能衰减系数,能见度影响系数,判断影响系数。
3 基于SUMO下的混合交通流典型场景运行仿真分析
SUMO(Simulation of Urban Mobility)是一個微观的,空间上连续,时间上离散的交通仿真软件。其场景信息获取与交互方便,模型标定简易等优势使它成为最广泛使用的交通仿真软件之一。因此本文中使用的SUMO作为仿真平台,同时使用Python进行交互控制。
3.1 场景参数设置
由于自动驾驶车辆通过检测器检测前车,而人为驾驶车辆通过驾驶员的感知跟驰前车,因此两者的跟驰行为模式不同,仿真中用章节一中提出的根据不同交通参与者进行分类跟驰模型进行标定,并对混合流进行综合矫正。
当目标路段经历不同的天气场景时,恶劣天气会对车辆尤其是人为驾驶车辆产生较大影响:大雨天气和大雾天气视野能见度受到一定影响,这会改变人为驾驶车辆的驾驶行为;雪天等路面湿滑天气会影响路面粘滞系数,两种车辆的驾驶状态都会改变。因此本节标定了不同天气对自动驾驶车辆和人为驾驶车辆的跟驰模型影响值,并进行仿真计算量化其对道路交通安全的影响。
基于此,实验设计将进行几种常见天气包括晴天、雨天、雪天、雾天的跟驰模型参数标定,测试其对通行能力的影响。各场景特性描述如下:
场景1:晴天,正常驾驶条件。
场景2:中度的雨天,路面湿滑且能见度比较小。
场景3:大雨天气,泥泞的路面且能见度极差。
场景4:轻微的雾,能见度受影响。
场景5:中度的雾,能见度较差。
场景6:雪天,湿滑的路面,较差的能见度。
不同场景会导致车辆跟驰模型参数的变化,表1呈现了不同天气下的视野状态,粘滞系数,视野可感知距离,自由流速度的参数值。
从表1可以看出,在晴天情况下视野最好,视野可感知距离为500m,而其他天气视野不能达到最佳状态,视野可感知距离均有不同程度的降低,特别是大雾天气下距离降为20m,车辆只能以极低的速度行驶。粘滞系数方面,由于雾天并不会影响路面状态,因此晴天和雾天的值最大为0.4。而雨天特别是雪天由于路面湿滑,粘滞系数极低,车辆速度不同程度的降低。晴天的自由流速度最大,其他场景下自由流速度不同程度的降低。
在SUMO交通运行仿真平台中,针对不同天气状态和自动驾驶车渗透率对通行能力和自动驾驶车辆标准当量的影响进行了仿真评价,仿真路网选择包含普通直线路段和少部分环道的三车道矩形闭环道路,路段总长度为5km,自动驾驶车辆和人为驾驶车辆分别按照1:3,1:1,3:1三种比例满负荷加载在仿真路网上,具体如图2所示:
3.2 天气条件的影响结果
在此基础上,进行仿真计算,SUMO仿真运行30分钟,获得结果如图3所示:
从上图可以得到:
(1)大雾天气和雪天的通行能力相对较低。
总体而言,通过横向对比,晴天的通行能力最高,而大雾天气和雪天通行能力相对较低,这是由于在恶劣天气下车辆行驶速度较低,且倾向于与前车保持较大的车头时距造成的。
(2)晴天和中度雨天渗透率的50%渗透率时通行能力最大。
比较不同的自动驾驶车辆渗透率,可以看出晴天和中度雨天中,50%的渗透率,即自动驾驶车辆和人为驾驶车辆的比例为1:1时,通行能力达到最高,过高或者过低的渗透率都会导致通行能力的降低。这是由于较低的渗透率使得通行能力的提高效果不明显,而过高的渗透率会由于智能车辆较为保守的驾驶行为,略微降低通行能力。
(3)恶劣天气下自动驾驶车辆渗透率的提高会增加通行能力。
在雾天和大雨天气,通行能力随着渗透率增加而提升,这是由于自动驾驶车辆通过检测器检测周围车辆,不受能见度影响,且自动驾驶车辆在湿滑路面行驶的稳定性较好,由于渗透率低时通行能力并不高,因此渗透率升高到75%时能显著提高通行能力。
恶劣天气对试验场通行能力有较大的影响,不同天气状况下自动驾驶车辆的标准当量也不相同。基于通行能力的结果仿真实验计算了对应状态下的标准当量值如表2所示:
从上表可以看出,(1)晴天状态下50%渗透率时标准当量最小,而其他天气状态下,随着渗透率的增加,标准当量逐渐变小。(2)当自动驾驶车辆渗透率较低时,恶劣天气对标准当量的影响较大,特别的是在大雾天达到4.68,而雪天也达到了4.32,少量的自动驾驶车辆的加入造成的混合车流由于车辆的跟驰模型不同,造成交通流更大程度的紊乱,因此自动驾驶车辆的标准当量较大。
4 结论
根据本文上述的研究内容表明,在具体路段投放自动驾驶车辆进行测试时需要实时考虑到路段自动驾驶车辆渗透率,天气环境因素的影响。实验结果表明,天气变化对混合交通流的通行能力和自动驾驶车辆标准当量折算系数均有较大影响,投放车辆时需要在不同天气下按相应比例投放两种车型,以期达到最大的通行能力。例如在晴天时采用中等渗透率会达到较好的通行能力,此时自动驾驶车辆的标准当量也较小。而在大雾天气,投放更多的自动驾驶车辆提高渗透率,由于它受能见度影响较小,故整体车流仍具備较高的通行能力且标注当量不至于过大。
基金项目:国家重点研发计划项目-测试示范区协同创新的环境构建、运行组织与管理技术研究(2018YFB0105201)
参考文献:
[1]Treiber, M. , Hennecke, A. , & Helbing, D. . (2000). Congested traffic states in empirical observations and microscopic simulations. Physical Review E,[J],62(2),1805-1824.
[2]Shladover,S.E., Nowakowski, C. , Lu, X. Y., & Ferlis,R..(2016). Cooperative adaptive cruise control: definitions and operating concepts. Transportation Research Record Journal of the Transportation Research Board,2489,145-152.
猜你喜欢
南风窗(2017年23期)2017-11-23
科技创新导报(2017年26期)2017-11-08
科学与财富(2017年28期)2017-10-14
中国计算机报(2017年22期)2017-09-16
山东工业技术(2017年15期)2017-09-05
中国科技术语(2017年3期)2017-07-10
汽车周刊(2017年5期)2017-06-06
中国科技纵横(2017年4期)2017-05-16
移动通信(2016年24期)2017-03-04
家用汽车(2016年9期)2016-11-04
