反应釜温度自抗扰控制系统
2021-05-09 08:25辛瑞昊唐琪喻佳俊王苹冯欣
现代信息科技 2021年20期
关键词:温度控制
辛瑞昊 唐琪 喻佳俊 王苹 冯欣

摘 要:基于反应釜的温度控制器具有高非线性、大滞后等特性,设计了一个自抗扰控制(Automatic Disturbance Rejection Control, ADRC)系统,与Z-N参数整定法的PID进行了比较,从仿真结果中可发现,ADRC的控制响应速度明显更快,并且当外部加入干扰时,自抗扰控制器能够很明显地改善温度控制系统的动态和控制特性以及抗干扰的能力,对提高反应釜温度控制系统的快速性具有重要作用。
关键词:反应釜;温度控制;ADRC
中图分类号:TP273 文献标识码:A文章编号:2096-4706(2021)20-0175-04
Automatic Disturbance Rejection Control System for Reactor Temperature
XIN Ruihao, TANG Qi, YU Jiajun, WANG Ping, FENG Xin
(Jilin Institute of Chemical Technology, Jilin 132022, China)
Abstract: Based on the characteristics of high nonlinearity and large delay of the temperature controller of the reactor, an ADRC system is designed. Compared with the PID of Z-N parameter tuning method, it can be found from the simulation results that the control
response speed of ADRC is obviously faster, and when external interference is added, ADRC can obviously improve the dynamic and control characteristics and anti-interference ability of the temperature control system, and plays an important role in improving the rapidity of the reactor temperature control system.
Keywords: reactor; temperature control; ADRC
0 引 言
間歇反应釜是石油化工产品中常见的化学反应器,以其造价相对低廉、热交换能力强等优势,被广泛应用于石油、化工、食品、医药等制造工艺流程中。在间歇反应釜的制造工艺流程中,环境温度一直是影响化学反应结果最关键的因素之一,它也直接地影响着质量和制造效果。但由于真空反应釜自身存在的较强滞后性、时变性和非线性等特征,使得对其进行温度控制困难很大,因此近年来关于间歇反应釜的温度控制一直是我国发展现代化制造工艺流程中高温监控技术应用领域研发的热点与难点[1]。由于传统的PID控制器是采用线性时定常控制系统,尽管有操作简便灵活、稳定性好、安全性高等的优点,但也因为它严重依赖于受控对象的精确数学模型,在控制系统处理过程中,只要确定了比例系数值、微分时间常数和微分时间常数等参量,便不会随着误差e或偏差变化率ec的变动而更改,即不是直接在线调整监控的参量。而对于真空反应釜非线性时变温控制器,若直接使用传统的PID控制器,则难以实现对反应釜温度控制的精确调控[2]。所以近年来有许多学者对反应釜温度控制的问题进行了研究,如文献[3]为解决反应釜温度的高滞后性和弱跟踪性问题,从而改善温度控制精确率和控温效率,在传统PID算法中通过增加了比例规定值的权重,在基础上又增加了模糊控制系统,利用模糊法则实时调整加权PID的比例系数和比例规定值权重,由此来提高了温度的跟踪性能。不过该控制系统方法也有一定的局限,只适合于高滞后非线性控制系统,而无法适应对精度高要求较特殊的控制系统,同时其适应性虽获得了提高,但当外在的环境变动较大时还会对控制系统效率产生比较明显的影响。
ADRC融合了现代控制系统理论与古典PID控制系统理论的优势,不管控制系统是线性的或者非线性的,它同样对被控对象没有依赖性[4],不同之处在于自抗扰控制器利用ESO(扩张状况观测器)检测并补偿由已知的扰动和未知的扰动合成的总扰动,同时安排过渡过程给给定信号,进而使得系统响应得更快并且不出现超调的现象[5,6],从而不管系统的状况变化鲁棒或者其抗干扰能力都相对较好。
综上所述,在本文的研究中,根据反应釜温度系统的特性,设计了一种自抗扰控制器,整体控制精度得到了很大的提升,当加入其他扰动时表现出较强的鲁棒性,同时与基于Z-N参数整定法PID进行对比,来突出ADRC控制器优良的控制效果。
1 自抗扰控制器
1.1 自抗扰控制原理
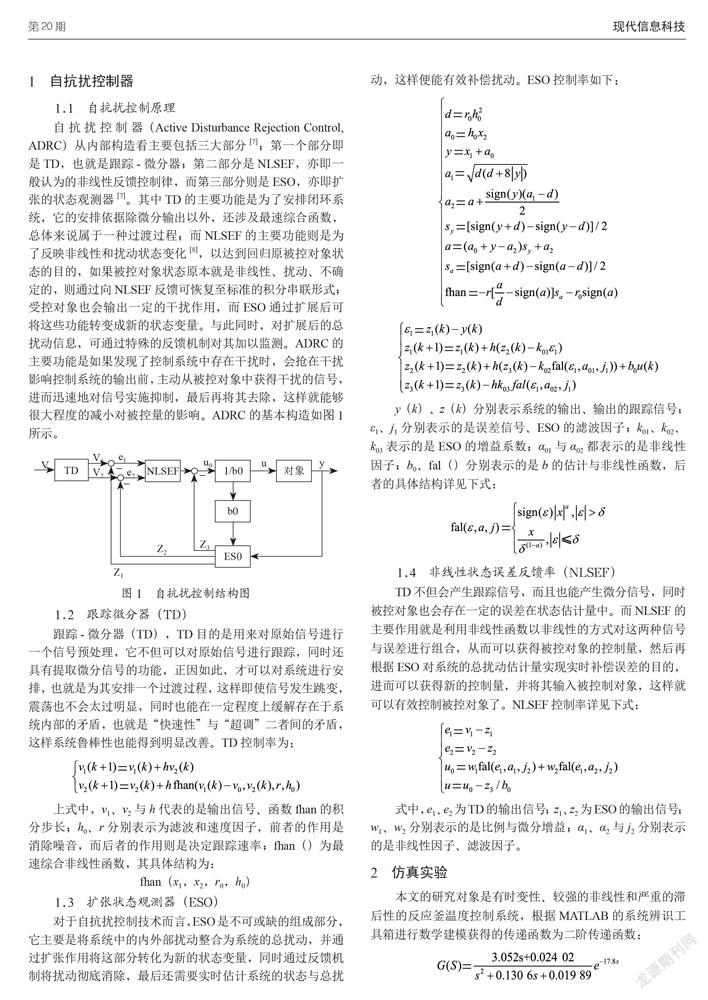
自抗扰控制器(Active Disturbance Rejection Control, ADRC)从内部构造看主要包括三大部分[7];第一个部分即是TD,也就是跟踪-微分器;第二部分是NLSEF,亦即一般认为的非线性反馈控制律,而第三部分则是ESO,亦即扩张的状态观测器[7]。其中TD的主要功能是为了安排闭环系统,它的安排依据除微分输出以外,还涉及最速综合函数,总体来说属于一种过渡过程;而NLSEF的主要功能则是为了反映非线性和扰动状态变化[8],以达到回归原被控对象状态的目的,如果被控对象状态原本就是非线性、扰动、不确定的,则通过向NLSEF反馈可恢复至标准的积分串联形式;受控对象也会输出一定的干扰作用,而ESO通过扩展后可将这些功能转变成新的状态变量。与此同时,对扩展后的总扰动信息,可通过特殊的反馈机制对其加以监测。ADRC的主要功能是如果发现了控制系统中存在干扰时,会抢在干扰影响控制系统的输出前,主动从被控对象中获得干扰的信号,进而迅速地对信号实施抑制,最后再将其去除,这样就能够很大程度的减小对被控量的影响。ADRC的基本构造如图1所示。
1.2 跟踪微分器(TD)
跟踪-微分器(TD),TD目的是用来对原始信号进行一个信号预处理,它不但可以对原始信号进行跟踪,同时还具有提取微分信号的功能,正因如此,才可以对系统进行安排,也就是为其安排一个过渡过程,这样即使信号发生跳变,震荡也不会太过明显,同时也能在一定程度上缓解存在于系统内部的矛盾,也就是“快速性”与“超调”二者间的矛盾,这样系统鲁棒性也能得到明显改善。TD控制率为:
1.3 扩张状态观测器(ESO)
对于自抗扰控制技术而言,ESO是不可或缺的组成部分,它主要是将系统中的内外部扰动整合为系统的总扰动,并通过扩张作用将这部分转化为新的状态变量,同时通过反馈机制将扰动彻底消除,最后还需要实时估计系统的状态与总扰动,这样便能有效补偿扰动。ESO控制率如下:
1.4 非线性状态误差反馈率(NLSEF)
TD不但会产生跟踪信号,而且也能产生微分信号,同时被控对象也会存在一定的误差在状态估计量中。而NLSEF的主要作用就是利用非线性函数以非线性的方式对这两种信号与误差进行组合,从而可以获得被控对象的控制量,然后再根据ESO对系统的总扰动估计量实现实时补偿误差的目的,进而可以获得新的控制量,并将其输入被控制对象,这样就可以有效控制被控对象了。NLSEF控制率详见下式:
2 仿真实验
本文的研究对象是有时变性、较强的非线性和严重的滞后性的反应釜温度控制系统,根据MATLAB的系统辨识工具箱进行数学建模获得的传递函数为二阶传递函数:
本文使用Z-N(齐格勒-尼柯尔斯)参数整定法设置了PID参数,此法可以确定控制器的非常准确的参数,在此之后也可以进行微调。
Ziegler-Nichols方法分为两步:
(1)建立闭环控制回路并确定稳定极限。
(2)根据公式计算控制器参数。
将单位为10的阶跃信号输入到系统内,这时PID和ADRC两种控制系统都会产生相应的阶跃响应,如图2所示。从稳定时间来看,ADRC控制稳定时间大致在2 000 s左右,就Z-N参数整定PID控制而言,刚开始时还处于震荡状态,进入稳定状态的时间在4 000 s左右。从响应速度来看,ADRC控制的响应速度是更快的。综上所述,ADRC的控制效果优于Z-N参数整定PID的控制效果。
假定控制器参数保持不变,将一个幅值大小为1的阶跃扰动在5 000 s时接入其中,其效果变化如图3所示。由图可见,在系统进入稳态的时间上两种控制方法并无明显差异,在扰动给入时,两种控制方法都偏离了输入的给定值,偏离后会恢复到设定值,恢复的过程中ADRC控制调节速度更加迅速,可以很平稳的恢复到设定值,而PID控制偏离了给定值一段时间后才缓慢的恢复到稳态,PID 的调节时间要比ADRC调节时间长。
3 结 论
本文的研究对象为反应釜,被控量为反应釜温度,根据反应釜温度控制的特点选择了ADRC控制器开展研究,将ADRC控制与Z-N参数整定PID控制进行了仿真对比,并得出以下结论:ADRC控制性能明显比Z-N参数整定PID的控制效果相对更好,ADRC的控制响应速度也相对较快。当增加了外部扰动时,ADRC的动态特性更为优异,抗干扰性和鲁棒性也更强。
参考文献:
[1] 淮朝磊.反应釜温度控制参数优化研究与PLC控制系统 [D].石家庄:河北科技大学,2020.
[2] 高晴,张莉,高田田,等.基于PCS7的反应釜炉温控制系统PID参数整定仿真与分析 [J].计算机与数字工程,2017,45(8):1607-1610+1624.
[3] 魏小宇,郑晟.运用灰色预测与模糊加权PID的反应釜温度控制 [J].重庆理工大学学报(自然科学),2019,33(2):82-86.
[4] 王鹏,郑博闻,秦付军,等.电锅炉智能控制系统及其FPGA实现 [J].中国农机化学报,2014,35(5):224-227+250.
[5] 韩京清.从PID技术到“自抗扰控制”技术 [J].控制工程,2002(3):13-18.
[6] 朱海荣,李奇.稳定平台二阶自抗扰控制器设计 [J].哈尔滨理工大学学报,2020,25(4):122-128.
[7] 陈振宇,孟婥,孙以泽,等.基于串级自抗扰的三维编织机同步控制 [J].毛纺科技,2020,48(10):72-76.
[8] NOWAK P,CZECZOT J,KLOPOT T. Robust tuning of a first order reduced Active Disturbance Rejection Controller [J].Control Engineering Practice,2018(74):44-57.
作者简介:辛瑞昊(1989—),男,漢族,吉林梅河口人,讲师,工学博士,主要研究方向:先进控制理论及应用、大数据分析;
唐琪(1998—),男,汉族,湖南邵阳人,硕士研究生在读,主要研究方向:先进控制技术;
喻佳俊(1996—),男,汉族,湖北仙桃人,硕士研究生在读,主要研究方向:先进控制技术;
王苹(1998—),女,汉族,山东济宁人,硕士研究生在读,研究方向:先进控制技术;
通讯作者:冯欣(1989—),女,满族,吉林吉林人,讲师,工学博士,主要研究方向:大数据分析、先进控制理论及应用。
猜你喜欢
小学阅读指南·低年级版(2020年10期)2020-10-12
建筑建材装饰(2016年13期)2017-01-04
建筑建材装饰(2016年9期)2016-12-29
电脑知识与技术(2016年23期)2016-11-02
科技视界(2016年15期)2016-06-30
电脑知识与技术(2016年10期)2016-06-16
科技视界(2016年14期)2016-06-08
科技视界(2016年5期)2016-02-22
中国高新技术企业(2015年22期)2015-06-15