
一种实现履带起重机力矩限制器免空钩标定的算法与应用 *
2021-05-18 05:33韩晓东李思奇王永立
机械研究与应用 2021年2期
韩晓东,孙 浩,李思奇,王永立,李 兵
(1.浙江三一装备有限公司,浙江 湖州 313000; 2.湖州师范学院 工学院,浙江 湖州 313000)
0 引 言
随着工程机械的快速发展及国内外市场需求的扩大,履带起重机凭借其可负载行驶、爬坡能力强、接地比压小等独特的优势,在路基建设、风力及化工建设等领域具有较大的市场占有率,具有其他起重设备无法替代的地位[1]。GB6067.1-2010《起重机械安全规程》规定额定起重量随工作半径变化的起重机需要安装力矩限制器,可有效防止超载引起臂架结构件断裂或车体翻车的危害,减少设备损害和人员伤亡[2]。
目前力矩限制器在实际应用中主要采用反推的方式,通过跑空钩以获取臂架自重力矩,进而计算实际吊载重量[3]。该方法需要对不同的工况均实行跑空钩标定,因此较为繁复。笔者提出一种可实现力矩限制器免空钩标定的算法与应用,能够提高其计算效率。
1 力矩限制器原理
履带起重机力矩限制器算法是通过获取拉板拉力、臂架角度,以臂架根部绞点为中心建立力矩平衡方程式,再根据方程即可求解臂架吊重,其算法原理如图1所示。

图1 力矩限制器算法原理
图中:A为臂架根部绞点;B为为滑轮中心;a为臂架角度;L为臂架长度;F为拉板拉力;f为钢丝绳拉力;n为钢丝绳倍率;H为滑轮效率。
F×LF+f×Lf=T×LT+G×LG+
mg×Lmg
(1)
式中:f=mg/nH,L、α为已知变量,并结合已知结构参数,通过三角关系即可求得公式(1)中各自拉力对应的力臂LF、Lf、LT、Lmg、LG,进而可以计算臂架吊载重量。
2 免空钩标定
2.1 免空钩标定算法的研究
免空钩标定算法能够根据不同的臂架工况自动计算臂架自重力矩。臂架长度决定臂架的重量,臂架角度决定臂架的力臂,因此通过臂架长度、臂架角度即可计算臂架自重。免空钩标定算法原理如图2所示,其中臂架角度由臂架角度传感器检测获取;臂架重量由臂架长度决定,均为已知变量。臂架自重力矩计算公式:
(2)
式中:GX为臂架重心到臂架根部绞点的距离;GY为偏移量。

图2 免空钩标定算法原理
2.2 免空钩标定算法的实现
免空钩标定算法中臂架自重力矩的计算通过空钩标定计算软件实现,该软件可根据车型和工况自动计算对应臂架的自重力矩。计算的数据存储在控制器存储单元中,系统可根据对应的工况自动调用,软件界面如图3所示。

图3 空钩标定计算软件
2.3 实验对比分析
试验检测数据以SCC3200A车型为例,针对18种不同的履带起重机臂架工况,采用免空钩标定算法得到的计算值与检测值对比如图4所示。
应用本文提出的免空钩标定算法,得到的18种工况下臂架自重力矩的具体计算值如表1所列。
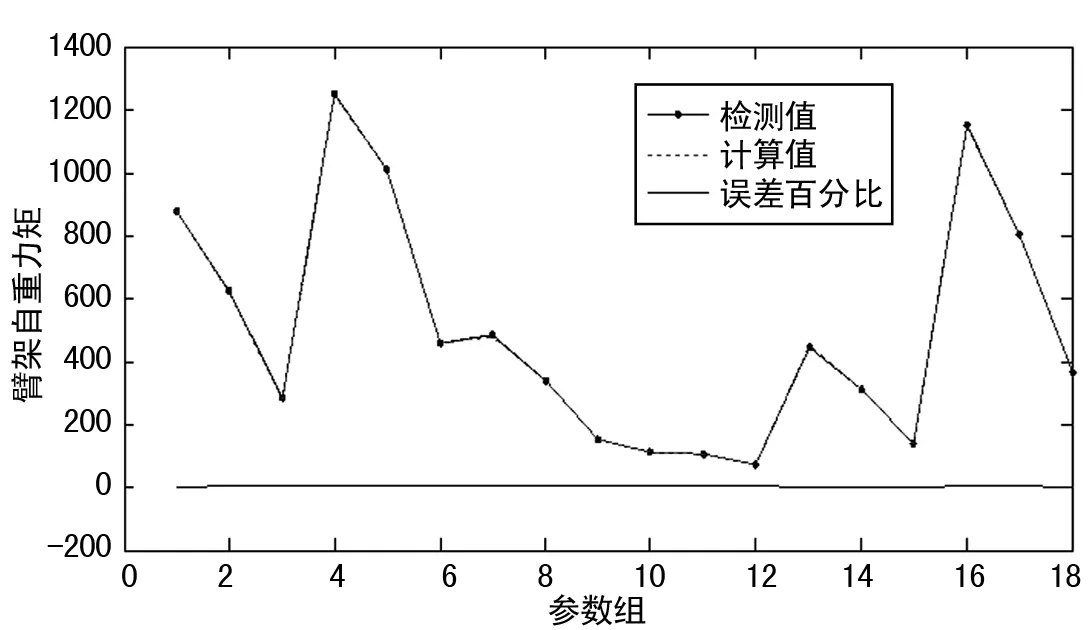
图4 免空钩标定算法臂架自重力矩的检测值与计算值

表1 臂架自重力矩的检测值和计算值
通过上述18种不同工况对比分析,臂架自重力矩试验检测值和理论计算值的误差率在0.159 3%~1.589 0%。造成误差的原因主要有,拉力传感器和角度传感器精度存在误差;推导模型相对理想化,没有考虑臂架挠度等其他因素的影响。在试验检测中误差基本控制在1.5%以下,可以满足力矩限制器综合误差精度的要求。
3 结 语
提出一种力矩限制器免空钩标定的算法与应用,该算法能够计算臂架自重力矩,与实验检测值的误差在1.5%以内。该算法可以应用到履带起重机力矩限制器的免空钩标定中,能够提高履带起重机的工作效率和经济效益。
猜你喜欢
水力发电(2022年11期)2022-12-08
当代医药论丛(2022年22期)2022-12-07
中国特种设备安全(2019年11期)2020-01-16
中国工程机械学报(2019年6期)2019-12-31
中国兽医杂志(2019年2期)2019-06-25
北京航空航天大学学报(2017年4期)2017-11-23
首都食品与医药(2017年22期)2017-10-25
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年7期)2016-11-23
大连理工大学学报(2016年5期)2016-10-12
