
倾角传感器稳定性测试与分析
2021-05-26 00:54陈燕飞吴俊娴司俊超
传感器世界 2021年4期
陈燕飞 吴俊娴 司俊超
1. 空装驻北京地区第一军事代表室,北京 100854;2. 北京国科舰航传感技术有限公司,北京 100101
0 引言
角度作为一个十分重要的物理量,在军事、工业等方面占据着十分重要的位置。倾角传感器作为一种测量角度的仪器,被广泛应用于导弹发射导轨起竖角度测量以及工程设备姿态的测量。
在实际应用中,倾角传感器的测量重点是稳定测量,因此,提高倾角传感器测量的稳定性就成为了重中之重。传感器工作环境温度变化较大[1],由于外界温度对传感器稳定性影响较大,因此,本文重点就两款倾角传感器野外环境下工作稳定性进行试验和对比分析。
试验过程中,选取使用相同加速度计的两款倾角传感器处于同一野外环境中,对其进行启动特性、静态稳定性和动态跟随性测试,收集两款传感器实验数据并进行对比。
1 传感器结构及稳定特性
1.1 传感器结构
本文选用的两款倾角传感器结构相同,系统整体结构框图如图1所示。倾角传感器以微控制单元为核心,由测量模块、电源模块、通信模块等组成。测量模块由石英挠性加速度计作为敏感源,经过AD转换,将采集完成的数据通过SPI上传至微控制单元。微控制单元将通过利用最小二乘法[2-3]和分段线性化结合获取到的温度补偿数据补偿至测量数据[4],通过隔离通信模块传输至上位机,从而实现了设备现行姿态的获取。
在这两款倾角传感器中,倾角测量模块使用的是石英挠性加速度计,该加速度计具有体积小、精度高、适用温度范围大等优点。传感器使用的电源模块和通信模块都进行了隔离处理,从而使得倾角传感器具有更好的抗扰性。通信模块与上位机之间使用RS422接口,该接口具有通信速度快、通信距离远、抗干扰性强等优点[5]。

1.2 传感器稳定特性
倾角传感器随待测装置放置在野外,不工作的时候,传感器内部温度与外部环境温度相近;当传感器通电启动后,传感器内部元器件开始工作,元器件产生热量,倾角传感器的敏感元器件的精度受温度影响。在传感器内部与外界环境进行热量交换,使温度达到平衡的过程中,传感器内部温度在不断变化,其输出的角度数据是不稳定的,而不同传感器由于设计、器件选型、制作工艺等方面的原因,使得传感器达到稳定的时间不同。
倾角传感器随待测装置在野外环境下工作过程中,外界环境温度产生剧烈变化时,在传感器与外界环境之间同样存在着热量交换、温度变化的过程,传感器会从一个稳定状态转换至另一个稳定状态,虽然这两个稳定状态所测得的角度数据相同。但在稳定状态转换过程中,倾角传感器输出数据会出现波动,根据输出数据波幅值的大小可以判断该款倾角传感器的静态稳定性。
2 传感器稳定性测试
在倾角传感器稳定性测试中,根据倾角传感器在安装设备上面的使用情况,本文重点对倾角传感器的启动特性、动态跟随性和静态稳定性进行测试。本文选取测试的两款倾角传感器测量精度是0.016°,测试设备的倾斜角度是60°,未启动之前,倾角传感器处于水平状态。在测试过程中将所选取的两款倾角传感器命名为传感器A和传感器B。
2.1 测试目的
经过一系列测试,获取到倾角传感器启动、动态跟随和稳态特性数据,以便于形成图表进行分析。
2.2 测试设备
本文中所选取的两款倾角传感器是成品,测试中将其应用到待测机械设备作为测试设备。
2.3 测试环境
由于两款传感器获取到的测试数据要进行对比,所以将两款传感器的测试环境在同一时间置于相同地点,即将测试设备放置于设备的使用地点。
2.4 测试平台
测试主要是在两台起竖设备上进行。在测试过程中,首先,将选取的两款倾角传感器安装于测试设备的安装位置,按照传感器使用说明进行安装;之后,对待测试的倾角传感器进行通电和通信检查,保证两个传感器能够正常工作;最后,按照测试步骤进行测试,对传感器测试过程中输出数据全程记录。
2.5 测试内容
本文主要测试两款倾角传感器的启动特性、动态跟随性和稳态特性,也就是测试设备的正常使用过程。由于测试的是传感器在测试设备上面使用的整个过程,因此,测试将分为3个阶段且进行多次测试。
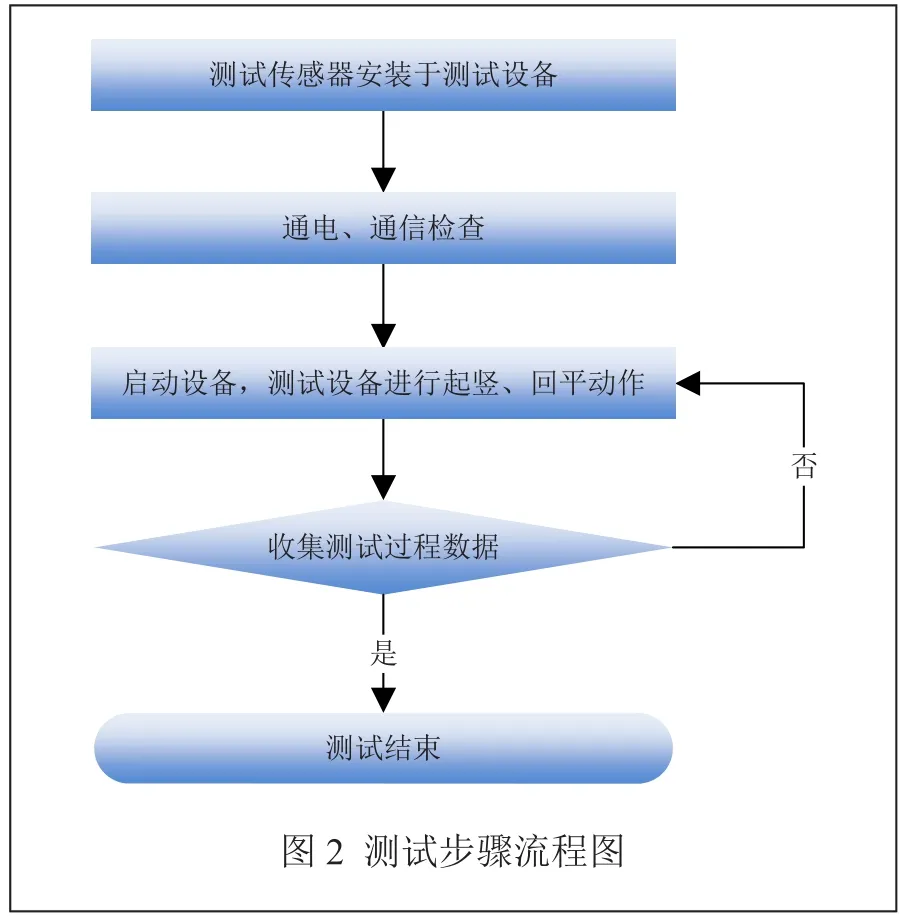
2.6 测试步骤
整个测试过程相对较简单,测试步骤流程如图2所示。
2.7 测试数据分析
由于倾角传感器测试是在野外环境中,因此要考虑环境的温度变化。本文将野外环境温度变化曲线模拟为正弦曲线,如公式(1):

式中,t——时间,该值是测试时间点;
k——一天的最高温度和最低温度的差值,该值在本文中取值为24 ℃;
T——时间周期,在文中取值为24 h。
测试是在白天进行,温度变化速率较快,因此对f(t)进行求导。将测试中获取到的值代入求导式中,可得到温度最快的变化速率,即0.1 ℃/min。
2.7.1 启动特性测试
将安装好倾角传感器的设备置于测试场地,传感器测量部位置于水平状态,此时传感器处于断电操作。两小时后进行传感器上电操作,记录上电后1小时之内的数据,倾角传感器A数据曲线如图3所示,倾角传感器B数据曲线如图4所示。
从图3中可以看出:倾角传感器A在上电1分钟内角度测量值为0.002°;上电1分钟至5分钟测量值在0.001°~0.002°之间上下浮动且变化频率较快,测量误差值为0.001°;上电5分钟至14分钟测量值在0.001°~0.002°之间上下浮动,而此时波动频率较低,测量误差值为0.001°;上电14分钟之后测量值稳定。由上述可知,测试选取倾角传感器在上电启动1分钟后逐步稳定。
图4中可以看出:倾角传感器B在上电启动15分钟后角度测量值为-0.048°,输出测量值达到稳定,测量误差值为0.001°;上电启动4分钟至15分钟之间测量值为-0.048°,测量误差值为0.002°;上电启动1分30秒至4分钟之间测量值为-0.049°,测量误差值为0.001°;上电启动1分30秒内测量值为-0.048°;上电启动1分30秒至15分钟之间测量误差值为0.002°,之后达到稳定。
图3和图4比较可以得出:在上电启动时,倾角传感器A比倾角传感器B更快地达到稳定状态;在达到稳定后一段时间内,倾角传感器A比倾角传感器B的测量误差要小。
2.7.2 动态特性测试
倾角传感器上电启动,待输出测量值稳定后,起竖倾角传感器安装部位。获取到倾角传感器起竖时的输出数据,将获取到的传感器输出测量值数据生成曲线。另外,从传感器安装设备中获取到设备起竖时的参数,生成起竖设备动作曲线。将两条曲线作差即可得到传感器测量值的滞后角度数据,倾角传感器A滞后曲线如图5所示,倾角传感器B滞后曲线如图6所示。
图5中可以看到:设备在35 s前处于水平状态,在35 ~43 s之间进行起竖动作,在43 s之后传感器再次进入稳定状态。在35 s处,设备从静止状态变为动态,滞后曲线向下凸起,传感器测量值紧随设备而动,动态跟随性较好。之后,传感器滞后性逐步加大,在41 ~42 s之间滞后达到最大值4.5°。最后,角度滞后值变小,逐渐为零。
图6中可以看到:倾角传感器B的起竖过程与传感器A相同,而在35 s处设备起竖时,传感器测量值并没有紧随传感器而动,在设备起竖一定角度之后,传感器测量值才会改变输出,在41~42 s之间,滞后达到最大值3°。最后,角度滞后值变小,逐渐为零。
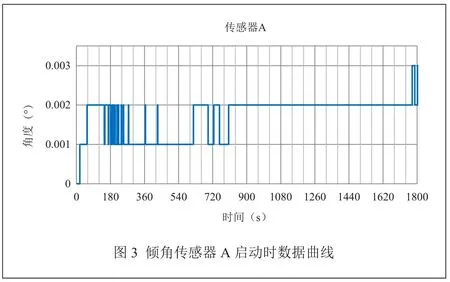
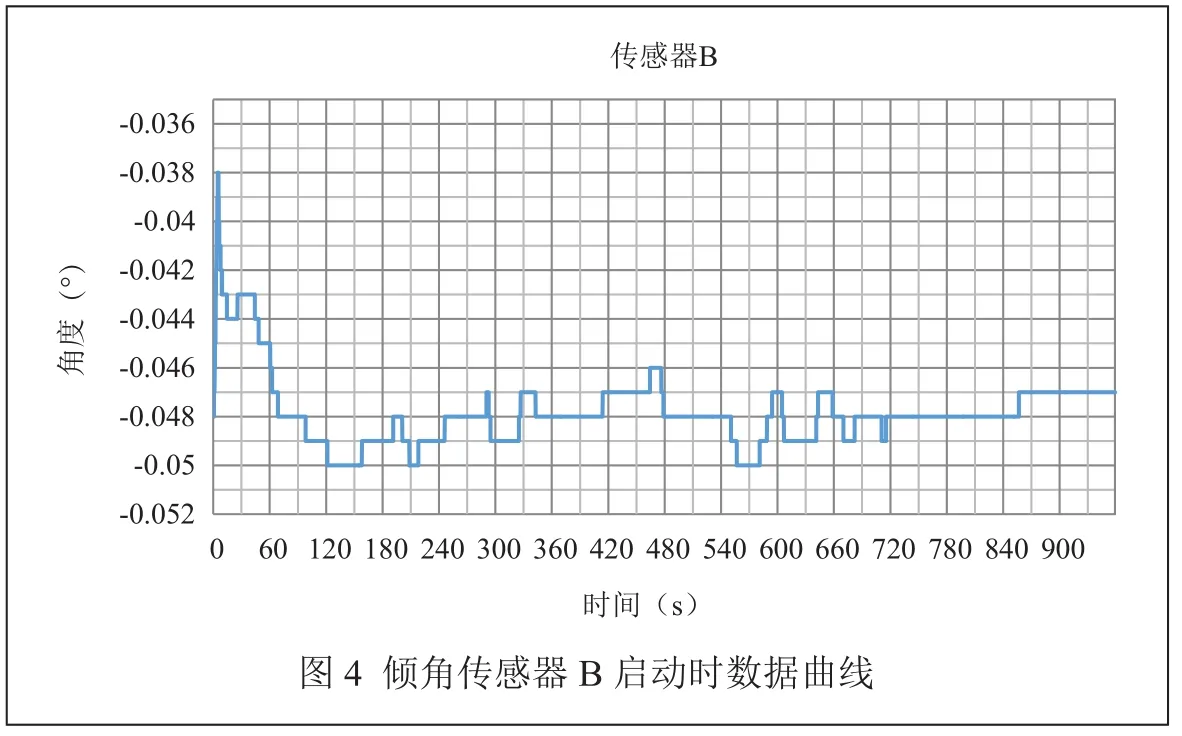
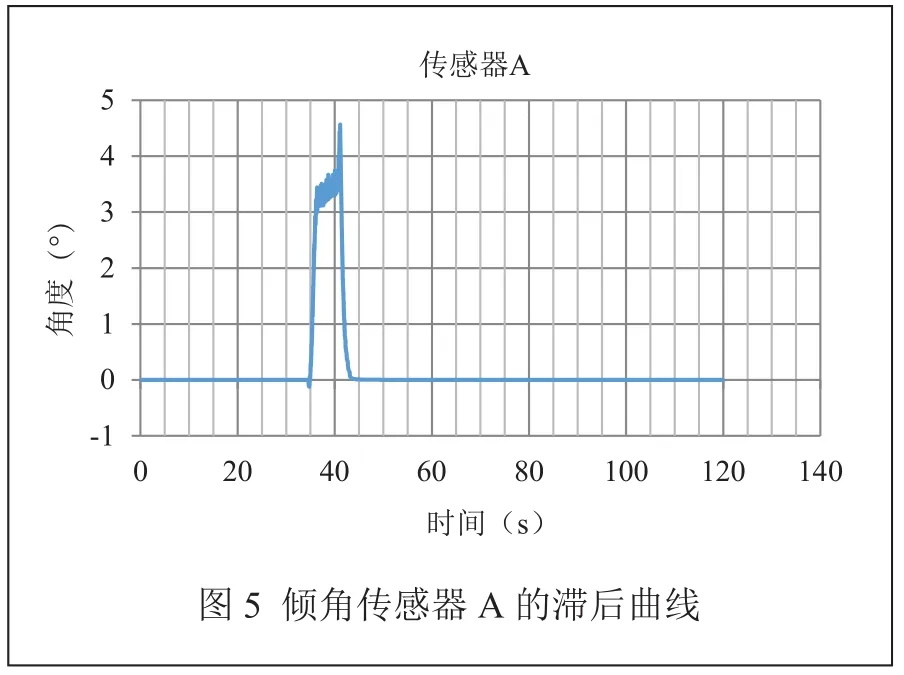

图5和图6比较可以得出:传感器A比传感器B的动态跟随性好,而在传感器与设备的滞后达到一定程度时,传感器B会使用新的数据处理方法,从而使得传感器B的跟随性变好。
2.7.3 稳态特性测试
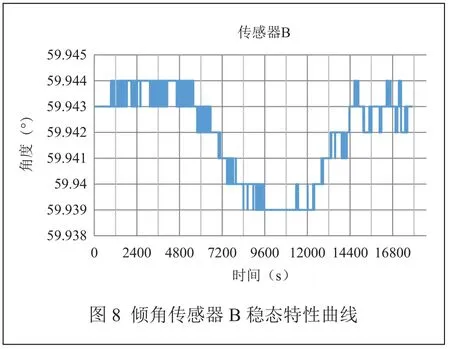
在设备从水平状态起竖至60°后,等待倾角传感器输出测量数据至稳定,持续监测和收集传感器输出数据,5~6小时后结束测试,处理传感器稳态时的数据生成曲线,倾角传感器A稳态曲线如图7所示,倾角传感器B稳态曲线如图8所示。
图7可以得到:传感器A在开始的1小时30分内输出测量值较为稳定。在1小时30分后测量值开始向大处偏移,在2小时20分处达到最大值,之后偏移量变小。在4小时处再次回到初始时的稳定状态。传感器A在温度变化较为剧烈时测量值最大偏移量为0.007°。
图8可以得到:传感器B在开始的1小时40分内输出测量值较为稳定。在1小时40分后测量值开始向小处偏移,在2小时30分处达到最大值,之后偏移值变小。在4小时处再次回到初始时的稳定状态。传感器B在温度变化较为剧烈时测量值最大偏移量为0.005°。
图7和图8比较可以得出:在相同的温度变化速率下,倾角传感器A比倾角传感器B测量值偏移量较大,倾角传感器A测量误差值比倾角传感器B测量误差值大0.001°。由此可知,倾角传感器B的稳态特性比倾角传感器A的稳态特性要好。
3 结论

本文就倾角传感器的启动特性、动态特性和稳态特性进行了测试,通过对测试数据对比分析得出,倾角传感器A的启动特性和跟随特性较好;倾角传感器B的动态跟随时滞后较小,稳态时、温度剧烈变化时角度的偏移较小。本文提出的稳定性测试分析方法为设备选取适合其使用环境的倾角传感器具有实际意义。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
煤气与热力(2021年4期)2021-06-09
科学大众·小诺贝尔(2021年10期)2021-01-22
应用数学(2020年2期)2020-06-24
中华戏曲(2020年1期)2020-02-12
电测与仪表(2015年18期)2015-04-12
