两相混合式步进电机转矩脉动最小化研究*
2021-05-28 07:28黄知超王文博朱芳来
组合机床与自动化加工技术 2021年5期
黄知超,王文博,朱芳来
(1.桂林电子科技大学机电工程学院,广西 桂林 541004; 2. 同济大学电子与信息工程学院,上海 200092)
0 引言
混合式步进电机综合了反应式和永磁式的优点[1],能根据接收到的电脉冲信号转换为相对应的角位移。随着步进电机相数的增加,其步进角,变小,精度就会提高,由于具有噪音低、效率高、高速停止等优点,常被用在医疗器械、家用机器人等高性能设备中。然而,由于转子本身具有磁性,所以定子绕组即使不通电,定子绕组和转子磁钢相互作用也会产生齿槽转矩。当产生的齿槽转矩过大时就会影响到电机的速度控制,会造成起动电流过大、转矩裕度减小等,因此齿槽转矩的大小是衡量混合式步进电机性能的一项重要指标[2]。
张泽豫等[3]通过优化后的转子表面辅助槽结构,可以有效降低内置式永磁同步电机的齿槽转矩。Chan-Bae Park等[4]通过利用极片倾斜的方法来改善永磁同步电机的齿槽转矩特性。Myung Soo Shin等[5]提出采用随机优化的方法降低电机齿槽转矩,通过调整定子齿距来减小所产生的齿槽转矩,从而减小速度波动。董丹阳等[6]通过在转子齿顶开设辅助槽,并通过有限元分析对辅助槽的槽数、间距等进行分析优化,进而减小转矩脉动。谈书志等[7]通过将槽口偏移适当的角度来抵消齿槽转矩中的谐波,从而减小永磁电机转矩脉动。1987年日本学者首次提出干扰观测器(DOB)[8]的概念,不久被Umeno T和Hori Y改进并运用到电机的控制中。干扰观测器的基本思路是将在控制过程中存在的外部干扰等效补偿到控制输入端。在对干扰进行估计时不需要建立准确的数学模型,因此避免了复杂的计算量,提高了电机控制的实时性。
为了有效的减小齿槽转矩对电机速度控制的影响,本文在加入含有低通滤波器的干扰观测器基础上,又引用了齿槽转矩补偿器,齿槽转矩补偿器主要由高通滤波器组成,其中包含的高功率因数的截止频率与扰动观测器的极点gdis的截止频率相同。通过两者结合将低频周期和高频周期转动所产生的齿槽转矩都考虑在内进行补偿,能有效地降低电机转矩脉动,提高电机的速度控制。
1 两相混合式步进电机数学模型
在两相混合式步进电动机中,两个绕组交替布置在定子磁极上形成线圈,通过线圈可以增强或减小永磁体的变化。首先在d-q坐标系中建立混合式步进电机的数学模型[9],混合式步进电机电压与电流、磁链之间的关系表达式为:
(1)
式中,ud、uq为d、q轴电压,id、iq为d、q轴电流,φd、φq为d、q轴的磁链。
如果只考虑转子磁极对齐绕组的情况,此时角度θ为0,则此时磁链的表达式为:
(2)
式中,φmax为电机绕组最大磁链值,ω为电机角速度,P为电机极对数。
由公式(1)和公式(2)可得电压方程为:
(3)
两相混合步进电机的机械动力学方程为:
(4)
式中,J为步进电机以及负载总转动惯量,B为粘滞摩擦系数,Tn为总扰动。
由公式(4)可得角速度表达式为:
(5)
2 基于混合式干扰观测器转矩脉动最小化控制
2.1 干扰观测器的设计

(6)
式中,TL为负载转矩,TC为齿槽转矩,J为惯性转矩,KT为转矩常数。
在实际系统中,考虑被控对象的传递函数的相对不为零和测量噪声等的影响,常通过在干扰观测器中串入低通滤波器(LPS)来解决这些问题[11]。在串入低通滤波器后干扰观测器的动态特性由基本上由低通滤波器来决定。其结构如图1所示。

图1 串入低通滤波器的干扰观测器结构图
(7)
式中,gdis是干扰观测器的极点。
2.2 基于干扰观测器速度控制器结构设计

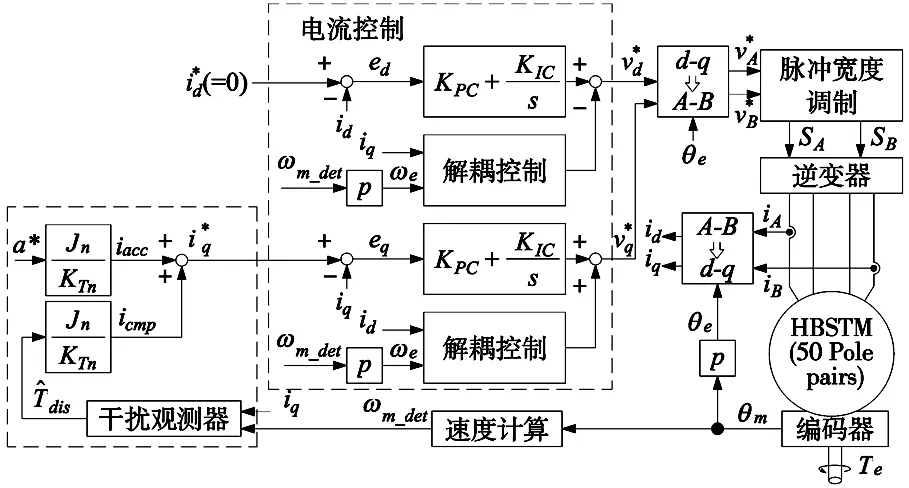
图2 基于干扰观测器速度控制结构
2.3 基于混合观测器速度控制器结构设计
混合式步进电机的齿槽转矩是周期性产生的,它的出现会使电机产生振动和噪声,当累积到一定程度时,会出现转速波动。特别是在变速驱动电机中,如果转矩脉动的频率逐渐与定子或者转子的机械共振频率接近,齿槽转矩产生的震动将会被放大,从而会影响电机的速度控制。同时,在具有高频周期的转矩扰动时,由低通滤波器产生的相位滞后也会影响电机的速度控制。因此,对串入低通滤波器的干扰观测器结构进行改进,在原有结构的基础上加入高通滤波器,其结构如图3所示。

图3 加入齿槽转矩补偿器速度控制结构图
另外,它受步进电机定子和转子安装误差的影响,分为定转子等齿距齿槽转矩和定转子不等齿距齿槽转矩,主齿槽转矩的表达式为:
TC=TC_1+TC_2+TC_4
(9)
式中,TC_1是电角度θe产生的齿槽转矩,TC_2是2θe产生的齿槽转矩,TC_4是4θe产生的齿槽转矩。当每个转矩脉动TC_n变成正弦波时,TC_n可以表示为:
TC_n=TCmax_ncos(n*θe+φn)
(10)
式中,TCmax_n表示TC_n的最大值,φn表示当n为1、2、4时θe的相位差。
(11)
(12)
(13)

(14)
3 仿真结果与分析
在本次仿真中,假设输入指令信号为正弦信号:r(k)=0.50sin(6πt),干扰信号也为正弦信号:d(k)=50sin(10πt)。惯性力矩Jn为0.75×10-2kgm2,转矩常数为0.188 Nm/A,干扰观测器的极点gdis为600 rad/s,带宽控制ωe为3500 rad/s。不同电角度下的转矩脉动以及相位差依次取TCmax_1=3 m·Nm,φ1=5.1 rad,TCmax_2=1 m·Nm,φ2=0.1 rad,TCmax_3=7 m·Nm,φ3=0.4 rad。
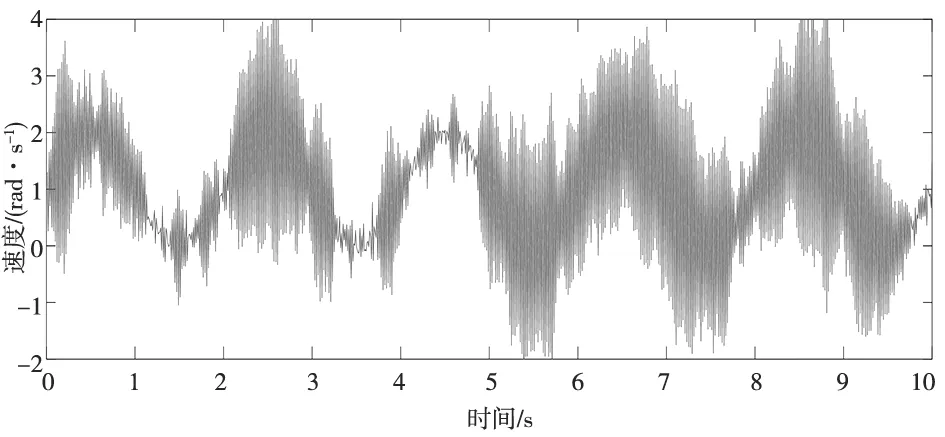
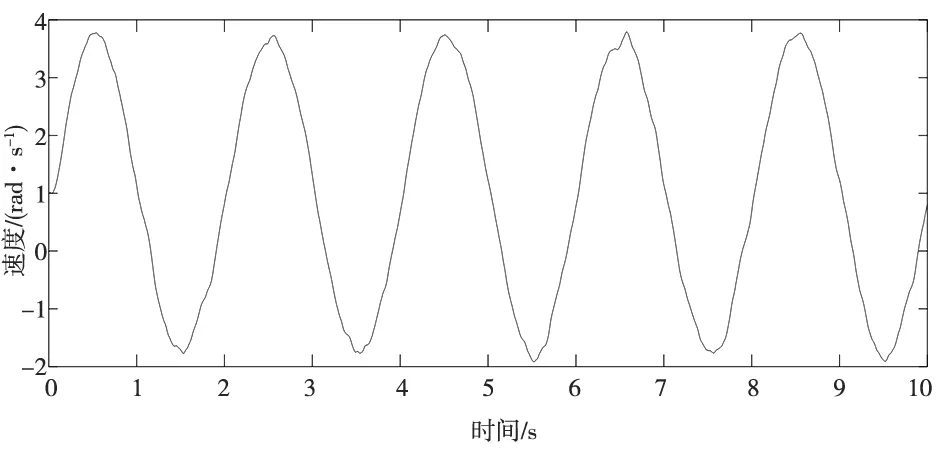
(a) 速度
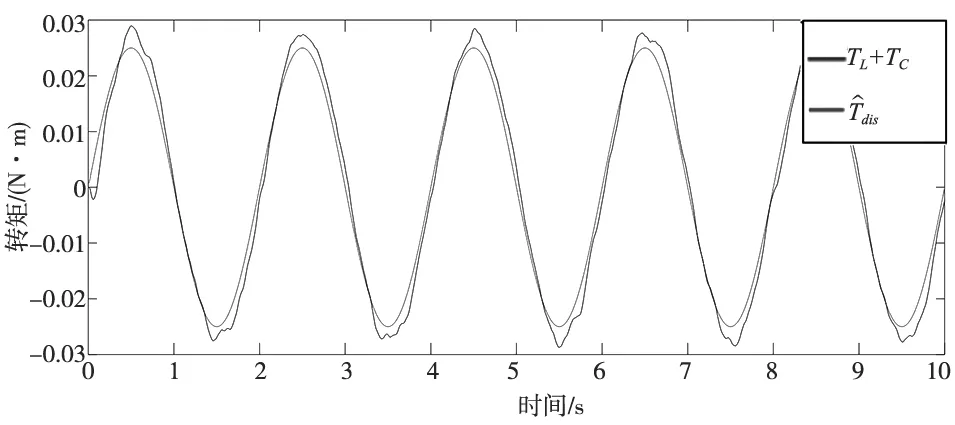
(b) 转矩图4 基于干扰观测器速度控制仿真结果
图4显示了常规速度控制的仿真结果,图5显示了所提出方法速度控制的仿真结果,图5a是速度曲线,图5b为转矩波形图。在施加指令信号后得到的速度波形如图4a和图5a所示。在传统的速度控制中,图4a中的ωm_de t会产生较大的速度波动,并且会影响速度控制的性能,图4b确认了齿槽转矩的估计值,当齿槽转矩变成高频周期的扰动转矩时,会产生大约2 ms的相位滞后,速度波动是由这种相位滞后产生的。

(a) 速度

(b) 转矩图5 基于改进干扰观测器速度控制仿真结果
4 结束语
本文针对混合式步进电机转子永磁体与定子铁芯相互作用产生的齿槽转矩以及外部扰动,提出利用串入低通滤波器的干扰观测器减少齿槽转矩所产生的干扰,根据仿真结果显示,会产生大概2 ms的相位滞后,进而产生转矩脉动,使速度波动比较大。在加入含有高通滤波器的齿槽转矩补偿器后,相位滞后明显减小,两条线几乎接近重合,速度波动平稳。实验结果表明,
加入含有高通滤波器的齿槽转矩补偿器能够很好地抑制高频周期运转时所产生的相位滞后,减小转矩脉动,提高混合式步进电机速度控制的鲁棒性。
猜你喜欢
防爆电机(2022年2期)2022-04-26
微特电机(2021年3期)2021-04-06
机电信息(2018年6期)2018-03-05
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年8期)2015-04-09
电测与仪表(2015年19期)2015-04-09
浙江大学学报(工学版)(2015年1期)2015-03-01
电测与仪表(2014年11期)2014-04-04
电子测试(2013年19期)2013-09-13