
密集井网直井段井眼轨道交碰风险计算新方法
2021-05-29 04:57李琪刘毅王六鹏高云文张燕娜张明
石油钻采工艺 2021年1期
李琪 刘毅 王六鹏 高云文 张燕娜 张明
1.西安石油大学石油工程学院;2.长庆油田分公司第二采气厂;3.长庆油田分公司油气工艺研究院
0 引言
近年来海洋油气勘探进入高速发展阶段[1],人工岛是实现“海油陆采”的一种高效开发模式。以冀东油田为例,已先后开发高尚堡、柳赞、老爷庙、唐海、南堡5座人工岛。其中南堡1-3D人工岛占地0.13 km2,截止2018年底已完钻井200口以上,但开发中后期采油速度大幅降低,为完成生产任务需在人工岛上进行丛式井组加密调整。目前地面可利用空间和井口十分有限,地下已完钻密集井段安全穿越也愈发困难,新建加密井数量越多相邻井眼之间的距离越小,在钻进时出现井眼交碰的概率就越大,任何非预期的井眼交碰都会给油田造成严重损失,因此防碰风险评价是密集井网加密井设计一个必不可少的环节[2-4]。常用的井眼交碰风险评价方法有井眼分离系数法、井眼交碰概率法以及井眼最近距离法[5-7],这些方法的共同点是评价体系中只有一口比较井,而密集井网条件下在防碰分析范围内的井眼往往存在多口,要规避其中任意井,势必造成与其他井的交碰风险增加。可见,在密集井网条件下采用现有方法进行井眼交碰风险评价不够全面准确。为此,根据密集井网加密井设计的特点,提出了一种可定量评价一口基准井与多口比较井的密集井网加密井井眼交碰综合风险评价新方法。
1 井眼综合交碰风险计算基本原理
1996年Brooks等首次提出井眼交碰概率的概念并给出了数学计算方法[8],该方法通过目标点和参考点的协方差矩阵计算井眼交碰概率,可定量评价2个误差椭球的分离程度,但是该方法只考虑到目标点和参考点的位置不确定性矩阵,忽略了两井眼名义间距对交碰概率的影响,评价结果难以满足防碰钻井要求。
笔者改进了Brooks的交碰概率模型,综合考虑名义间距、基准井和比较井的井径之和以及邻井数等因素,建立了一个比较全面的密集丛式井网井眼交碰风险计算方法。通过几何概率模型计算井眼偏向某邻井方向的概率θi,运用Brooks的井眼交碰概率模型计算相邻井眼的交碰概率Pi,井眼实际交碰风险值为θi与Pi乘积,则密集井网井眼交碰综合风险值为基准井与各比较井井眼实际交碰风险值的和,和值越小井眼综合交碰风险程度越低,否则越高。图1为密集井网某一深度基准井、比较井相对位置示意图,图中O为基准井,O1、O2、O3为比较井,d1为基准井井径,d2为比较井井径,S1、S2、S3分别为基准井到各比较井的名义间距,则基准井向O1方向倾斜的概率等于长度为d1+d2的弧长与半径为S1的圆周周长的比值,记为θ1,运用Brooks交碰概率计算模型可计算得到基准井O与比较井O1的交碰概率P1,同理可以得到θ2、θ3、P2、P3,则图示密集井网的综合交碰风险值为
图1 多口比较井工况下的交碰风险分析Fig.1 Collision risk analysis in the working condition of multiple comparison wells
2 井眼综合交碰风险计算方法
2.1 计算井眼偏向目标区域概率
受地层非均质性、钻具组合、钻头类型等因素影响,钻井过程中会出现方位偏移,偏移方向具有随机性但服从几何概率分布模型,基准井与某一比较井的相对位置如图2所示,图中O为基准井、O1为比较井,基准井、比较井井眼直径分别为d1、d2,名义间距为S,∠AOB为α,则名义间距、井径之和与交碰概率的关系如式(1)~(3)所示。

式中,(xo,yo,zo)为目标点坐标,(xr,yr,zr)为参考点坐标。
图2 基准井与比较井相对位置示意图Fig.2 Sketch of the relative position of comparison well to reference well
由图2可知,当基准井向AOB区域偏移且偏移距离大于S−0.5(d1+d2)时两口井发生交碰,当基准井向其他区域偏移时,则与比较井O1发生交碰事故的概率为0。根据几何代数AOB区域满足如下关系

由几何概率定义,某事件发生的概率等于该事件的几何尺寸与总几何尺寸的比值,则基准井向AOB区域偏移的概率为

2.2 计算井眼交碰概率
误差源是井眼轨迹误差分析的基本要素,主要分为随机误差源、系统误差源,任一测点处的井眼位置不确定性矩阵可由不同误差源贡献累加获得,ISCWSA提供了不同误差传播模式下的协方差矩阵计算公式[9-11]。假设通过井眼轨迹位置不确定性分析方法,得到目标点和参考点的位置不确定矩阵C1、C2,其中不确定矩阵C1、C2相互独立,则两个矩阵之和表示目标点和参考点位置的相对不确定性,记为C。
式中,σxx、σyy、σzz为坐标轴上的方差,其余各项为坐标轴间的协方差。
在井眼轨迹测量领域通常假定井眼轨迹位置坐标服从正态分布,根据概率论与数理统计学,三维空间某点位置坐标的正态分布概率密度函数为[12]

式中,r为某点坐标位置增量,C−1为井眼不确定矩阵的逆矩阵,∆为相对位置不确定性矩阵的行列式,该不确定性矩阵是坐标位置的函数,与坐标位置增量无关。当坐标位置确定时,式(7)分母为一个常数,则该测点处三维空间正态分布概率密度值相等的点满足下式

式(8)为一误差椭球族,其中k为放大因子,表示井眼位于椭球区域的概率。
目标点是基准井上最接近参考点的点,目标井的局部方向与两点连线正交,井眼交碰定义为目标点与参考点间的距离小于等于两口井井眼半径之和,若两口井井眼半径之和与井眼名义间距数量级相差不大,则井眼交碰概率表示为

式中,do为基准井井径,dr为比较井井径,f(x,y,z)为三维空间某点位置坐标的正态分布概率密度函数,dL为井眼微元段。
目标井眼局部为直线,则坐标位置增量可由一点ro和单位向量ν线性表示,即

联立式(7)、(10)可得
其中

将式(11)代入式(9)化简整理得

2.3 密集井网井眼综合交碰风险
通过上述计算方法得到目标井与各比较井的θi和Pi,则密集井网井眼交碰综合风险值(wellbore collision comprehensive probability)为

式中,θi为目标井偏向第i口比较井的概率;Pi为目标井与第i口比较井交碰概率;n为密集丛式井防碰分析区域内的邻井数。
基准井井眼偏移概率、井眼交碰概率均表示事件发生的可能性,取值范围均为(0,1)。由《密集丛式井上部井段防碰设计与施工技术规范》(Q/SY 1296—2010)防碰区域划分标准,密集丛式井直井段防碰分析区域为以基准井井眼中心轴线为圆心、半径为15 m的空间,当两井眼中心轴线距离超过15 m时为安全范围,无需进行防碰分析,同时根据开发调整井网钻井井眼轨道防碰控制要求[13-14],设计井深在同一防碰井段两井眼中心轴线距离小于15 m的井不能多于3口,否则即为高交碰风险井,因此RWCCP的取值范围为(0,3)。针对密集丛式井网现场施工实际,综合中国石油天然气集团公司生产安全风险防控管理办法及相关专家意见,依据RWCCP划分密集井网井眼交碰风险评价等级,制定防碰风险量化表,如表1所示。

表 1密集井网井眼防碰风险分析量化表Table 1 Quantitative wellbore collision risk analysis of dense cluster wells
3 实例分析
冀东南堡3号人工岛某设计调整加密井部分测斜数据如表2所示,将该轨迹数据导入Campass采用最近距离扫描,扫描结果显示与邻井的分离系数均大于1,但按照设计进行施工在井深470 m处却发生了非预期的井眼交碰,给油田带来较大的经济损失。
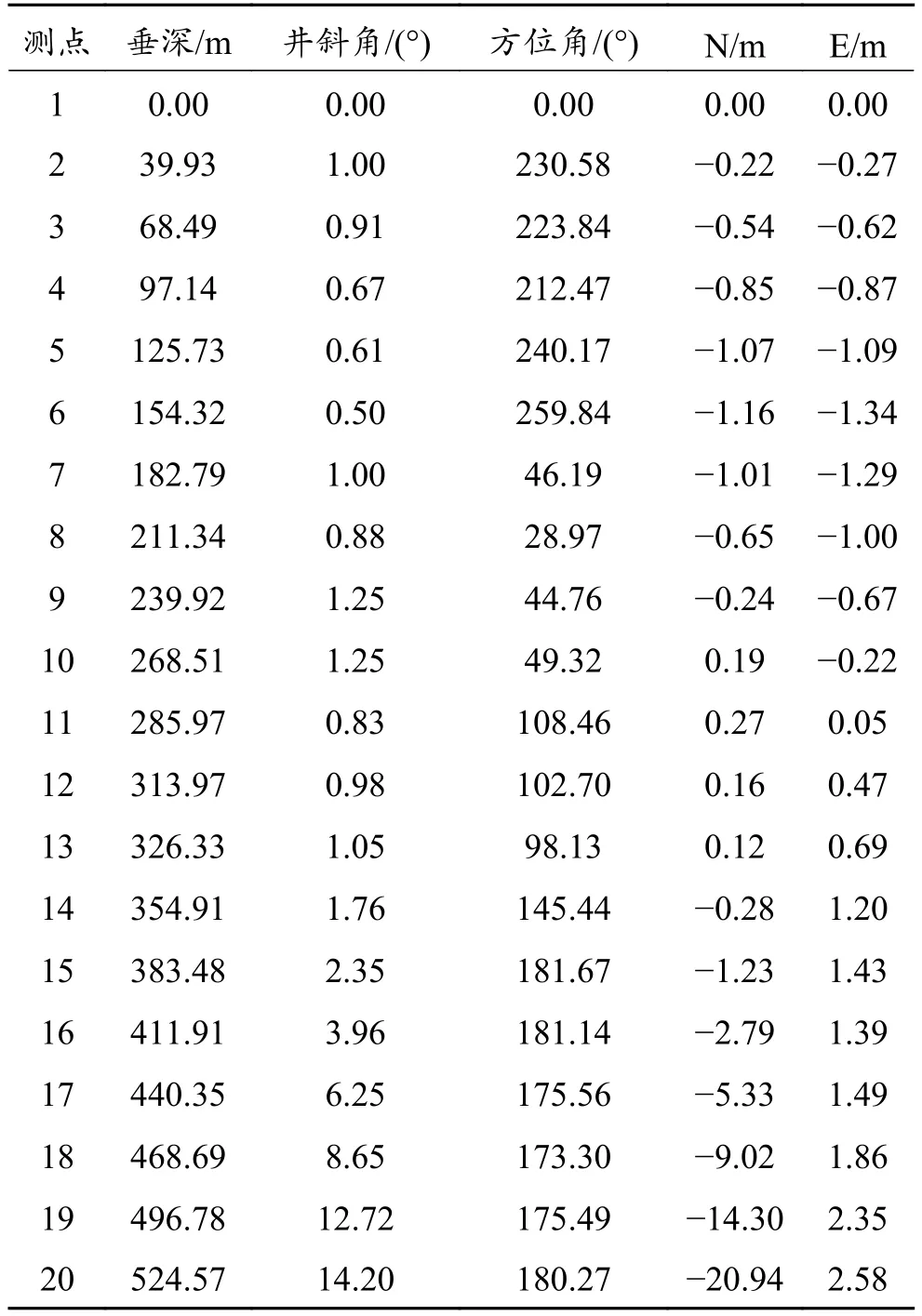
表2 调整加密井部分测斜数据Table 2 Partial directional data of adjustment infill wells
调整加密井井深470 m处在密集丛式井网防碰分析范围的邻井有2口,分别为#1井、#2井,该深度处#1井、#2井的轨迹基本参数如表3所示。通过井眼轨迹不确定分析方法得到井眼直径为244.5 mm的加密井、#1井以及#2井协方差矩阵。
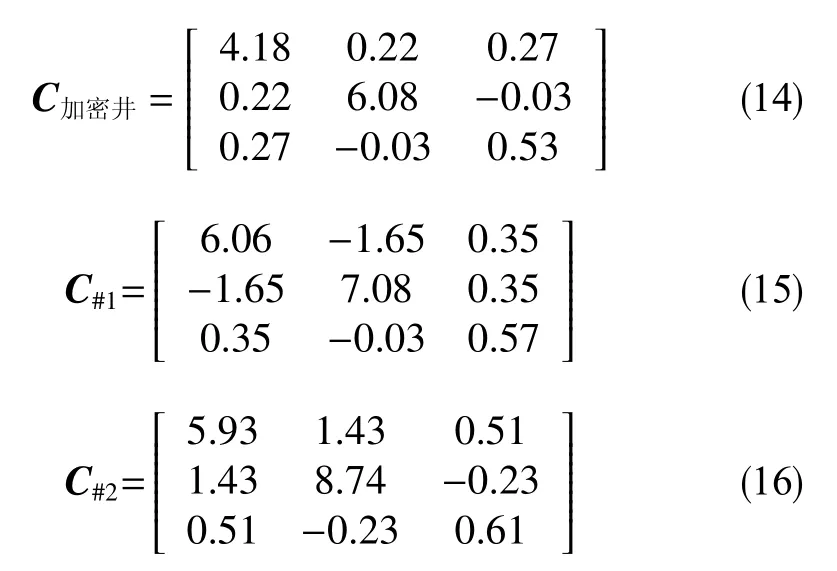
采用本文的密集井网加密井井眼综合交碰风险计算方法对该设计井进行风险分析,470 m处井眼交碰综合风险值为1.019×10−4(二级风险),此时应关闭邻井制定防碰措施,便可规避该交碰事故的发生,可见该方法对于指导密集井网加密井防碰施工具有重要意义。

表3 井深470 m处邻井井身轨迹基本参数Table 3 Basic wellbore trajectory parameters of the neighboring wells at the well depth of 470 m
4 结论
(1)井眼分离系数法、井眼交碰概率法和井眼最近距离法不适用于密集井网条件下的井眼防碰分析。
(2)改进了Brooks的交碰概率计算模型,交碰概率计算应综合考虑名义间距、井径以及邻井数等因素,在此基础上提出了一个比较全面的密集丛式井网井眼交碰风险计算方法,并给出了密集井网井眼防碰风险量化等级标准。
(3)该方法可定量评价一口基准井与多口比较井之间的综合交碰风险,对加密井钻井防碰理论研究及指导生产实践具有重要意义。
猜你喜欢
上海计量测试(2022年1期)2022-03-24
今日农业(2021年9期)2021-11-26
英语文摘(2021年2期)2021-07-22
湖北农机化(2020年22期)2021-01-18
——以J油田M区为例
石油地质与工程(2020年4期)2020-08-24
好日子(下旬)(2020年6期)2020-08-04
消费导刊(2019年3期)2019-01-28
科学与财富(2017年1期)2017-03-17
BOSS臻品(2015年1期)2015-09-10
太空探索(2015年5期)2015-07-12
