基于 BIM 模型的城市轨道交通自动扶梯智能监测系统
2021-05-29 07:53马建文
现代城市轨道交通 2021年5期
马建文
(中铁第四勘察设计院集团有限公司,湖北武汉 430063)
1 引言
自动扶梯(以下简称“扶梯”)广泛用于城市轨道交通中,具有运行时间长(每周7天,每天20 h)、载荷大(最大输送量高达8 190人次/h)等特点。由于扶梯与乘客直接接触,因此维持其正常运行是乘客安全的重要保障。近年来,因设备维修保养(以下简称“维保”)不到位、老化、磨损等原因引起的扶梯伤人事故频频发生,其根本原因在于扶梯的维保方式以故障修(即在设备出现故障时进行维修)和计划修(即按照一定的周期对设备进行维保)为主,难以根据设备的运行状态预先发现可能存在的安全问题,从而很难提前消除隐患。因此,研发扶梯智能监测系统,并据此开展扶梯的预防性维保工作,以确保乘客安全,十分必要。
建筑信息模型(BIM)技术是一种新兴的数字信息技术,BIM模型集成了建筑工程项目各种相关信息,是对工程项目相关信息详尽的数字化表达,具有可视化、协调性、模拟性、优化性和可出图性五大特点。本文构建一种基于BIM模型的自动扶梯智能监测系统(以下简称“监测系统”)。该系统可通过对扶梯运行数据进行采集和加工,将其状态实时反应到BIM模型中;然后根据BIM模型信息进行故障预测;最后以BIM模型、维修知识的形式将维修信息反馈到移动终端,供现场维修人员查阅与使用。
2 系统架构设计
本文构建的监测系统如图1所示。
该系统可划分为4部分:现场层、信息层、分析层及应用层。
(1)现场层。负责对扶梯的各种运行参数进行实时动态监测,有以下2项功能:①采集扶梯自身参数,如振动、位移、主机温度等;②监测扶梯运行的外部环境状态,如通过人数、运行时间、空气温度和湿度等。
(2)信息层。通过现场总线读取扶梯监测传感器数据,并采用无线传输的方式将其发送至远端的控制中心,以便对其进行分析与处理。
(3)分析层。该层是整个系统的核心,负责提取和分析现场采集的数据,并据此将扶梯的当前状态实时体现在BIM模型中;然后根据模型的关联性,结合人工智能算法,对扶梯状态进行实时预测,并提供维保决策辅助。
(4)应用层。该层的功能是实现对扶梯状态的实时显示、查询以及对维保服务的支持。其分为2部分:① 管理人员应用部分,实现扶梯状态实时查询及维保决策辅助功能;②现场人员移动应用部分,以BIM模型、维修知识的形式,为现场维修人员提供在线维保支持。
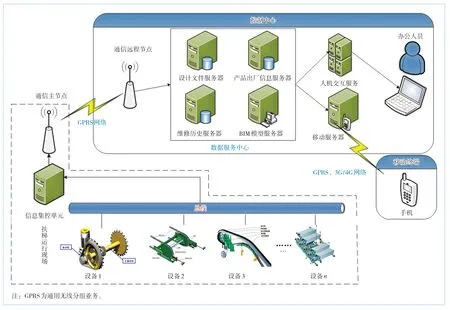
图1 监测系统示意图
3 关键技术
3.1 非接触式数据采集技术
实现实时、精确、顺畅的信息采集是监测系统正常运行的基础,因此其对传感器系统提出了如下高要求:
(1)具备高可靠性,不漏报,不误报;
(2)具有长期稳定性;
(3)能够防水、防潮、防腐,并适应不同的气候条件;
(4)由于扶梯通常在较强的电磁场环境下运行,因此其传感器系统必须具有较强的抗电磁干扰能力;
(5)由于监测项目和参数众多,因此多种监测技术和监测信号必须具有良好的融合性;
(6)组网方便,便于集中远程传输。
为满足上述要求,该系统采用光纤光栅传感器采集扶梯运行状态数据,因为光纤光栅传感器具有重量轻、体积小、外形可变、抗电磁干扰、电绝缘、耐腐蚀、灵敏度高、测量范围广、信息容量大、输出线性范围宽等特点。所组建的扶梯状态监测网络如图2所示。
光纤光栅传感器负责对扶梯的振动、噪声、温升、位移、应变等参数进行采集,并通过现场网络(采用双环网同步数字体系(SDH)技术构建)将数据上传至现场数据主机中。现场数据主机在对数据进行光/电转换之后,通过无线网将其传输至控制中心。
为解决监测系统采集数据量巨大、占用计算机资源的问题,本文提出变频率数据采集技术,即当扶梯正常工作时,现场数据主机采用较低的采样频率读取传感器数据,以尽可能减少不必要的数据存储与分析操作,节省计算机资源;当某个传感器的监测数据发生突变时,现场数据主机则提高对该传感器数据的读取频率,以确保对扶梯状态的实时跟踪与分析。变频率数据采集流程如图3所示。
3.2 扶梯状态分析和预警技术
3.2.1 基于 BIM 模型的扶梯状态分析
本文建立的扶梯BIM模型如图4所示。
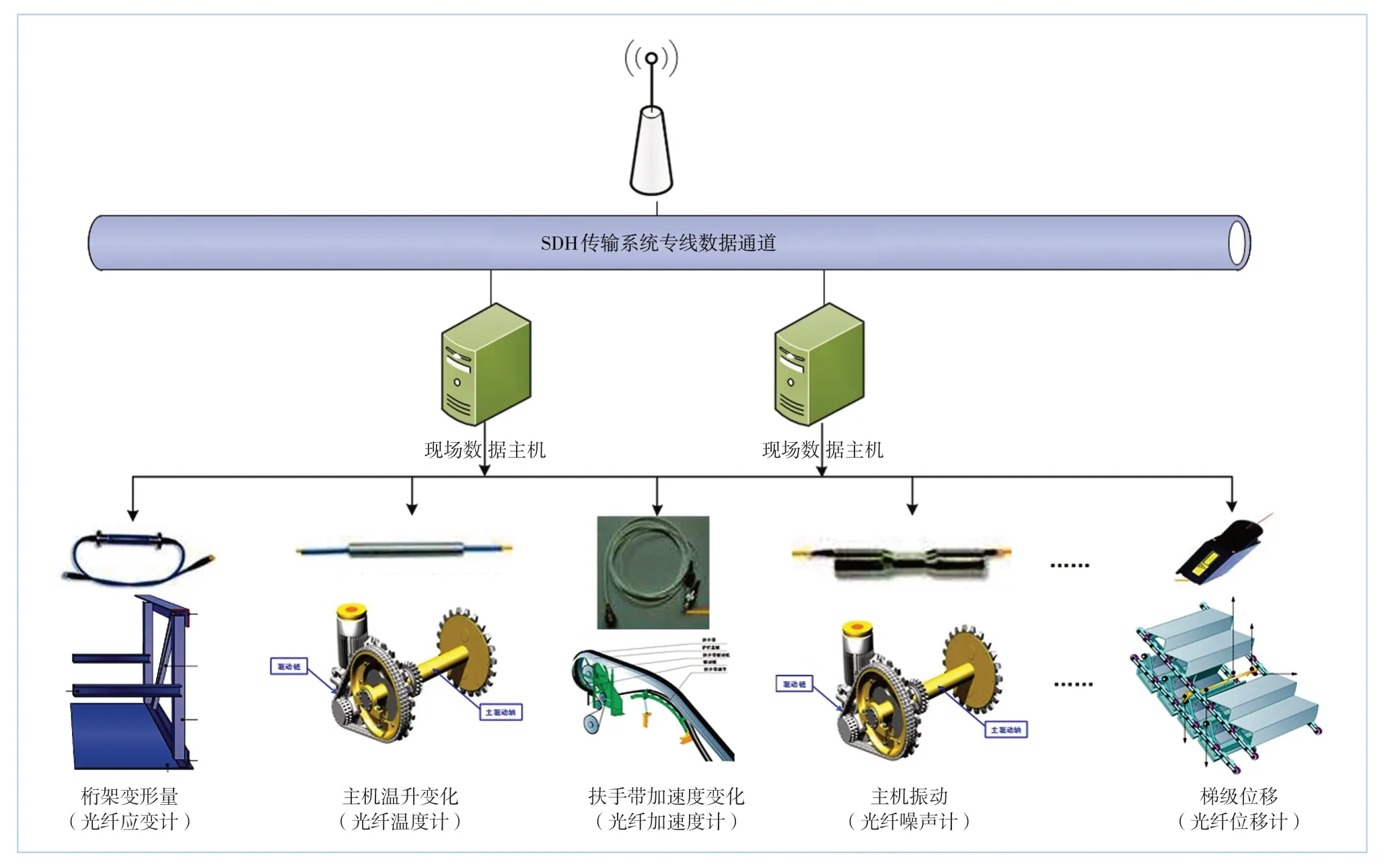
图2 基于光纤光栅传感器的扶梯状态监测网络
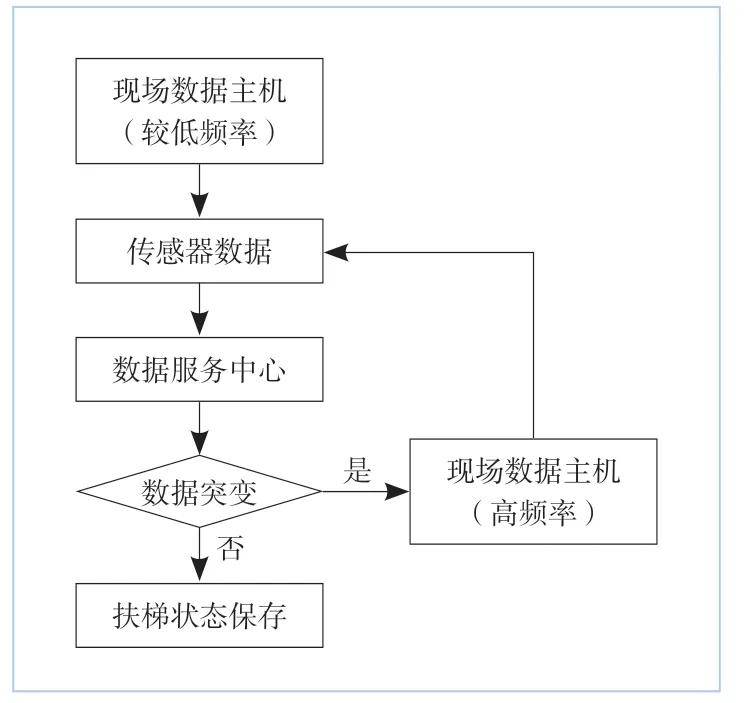
图3 变频率数据采集流程

图4 扶梯BIM模型
控制中心的数据服务中心在接收到传感器采集的扶梯状态数据后,对其进行分析和处理,并集成到扶梯BIM模型中,在BIM模型中模拟现场设备状态,通过模型之间的相互作用,确定此状态可能产生的影响。例如,监测驱动主轴状态时,系统会将传感器采集到的驱动主轴振动数据反馈到驱动主轴BIM模型中,并通过模型的装配关系将振动传递至主轴的固定装置上(图 5),在BIM模型中对固定装置进行力学以及稳定性分析,根据模拟分析得到的结果确定驱动主轴的振动对扶梯可靠性的影响。在此过程中,系统通过标准阈值范围判断监测数据是否异常。
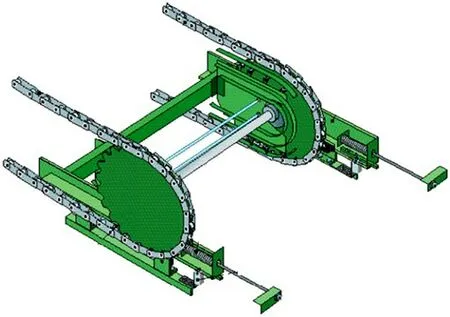
图5 驱动主轴BIM模型
3.2.2 基于深度神经网络的扶梯状态预警技术
利用深度神经网络具有多个隐藏层,可用较少的参数表示复杂函数的特性,本文构建了基于深度神经网络的扶梯状态预警系统,如图6所示。其工作原理如下。
(1)采集扶梯各部件的振动、位移、噪声、温度等多维状态数据,以及人员通过量、载荷分布、空气温度和湿度等外部环境状态数据,作为深度神经网络的输入参数x= [x1x2…xn],其中,xi为多维监测数据参数。
(2)基于BIM模型,分析各个部件状态输入参数与扶梯状态输出的关联性,建立传递函数σ1(x),则第二层的输出为:

式(1)中,a2为隐藏层1的输出结果;ω1为输入层到隐藏层的线性关系;b1为偏倚参数;m为节点数量。
(3)分析外部环境因素与扶梯状态的相关性,建立其关联函数σ2(x),则第三层的输出为:
式(2)中,a3为隐藏层2的输出结果;ω2为输入层到隐藏层的线性关系;b2为偏倚参数;m为节点数量。
(4)通过模拟扶梯零部件的接触关系以及寿命变化过程,结合相关指标的变化趋势,利用多元回归法预测扶梯零部件的剩余寿命y:

式(3)中,k0,ε为调整常量;k1,k2,…,kn为各输入参数的权重系数。

图6 自动扶梯状态深度神经网络
(5)根据现场维保情况,反向修正各层传递函数的权重,优化神经网络。
3.3 基于知识工程的维保辅助技术
在预测出扶梯的剩余寿命后,可根据线网中所有扶梯的状态,按照剩余寿命由少到多的次序进行养护维修。在维保过程中,维修人员通常需要参考一定的标准以判断维保的质量,这些标准包括相关的维保规则、标准、规范,以及以往的维修经验等,可统称为维修知识。这些知识可根据来源分为规范知识与经验知识。本文针对监测系统构建了相应的维修知识库,用于指导后期的养护维修。
3.3.1 知识的存储
(1)规范知识。规范知识是各种维修规则、标准对维修参数的规定和要求,具有条令性强、参数明确等特点,以参数化的形式明确各部件的验收标准。如《自动扶梯和自动人行道的制造与安装安全规范》(GB 16899 -2011)中对扶梯的各种尺寸进行了详细的规定,此类知识适合采用数据表格的形式进行存储。此类知识通过对知识库进行查询操作即可获得,查询语句如“SELECT [字段名],[字段名] FROM [表名称] where [查询条件]”。
(2)经验知识。经验知识主要来源于以往的维修经历,是通过对以往维修经历进行总结得来的。它具有相对模糊、灵活的特点,因此此类知识在存储时需要采用关键字、关联索引的方式。此类知识在知识库中表示为:

其中,Class为分类,表示属于哪种类型的知识,如养护、维修、破坏等;keyword为索引的关键词;provider为知识提供者;date为知识的提供日期;path为知识的存储路径;size为知识的大小。针对既有的维修经验,可提取其病害类型、维修对象、维修工艺以及维修效果等关键特征,存入知识库,并在出现新故障时采用推理比较的方式,对新故障进行历史数据库的比对,查找类似的维修经历;如果无类似的维修经验,则在提取当前故障特征后,将其纳入知识库中,不断完善知识库,如图7所示。
3.3.2 知识的运用
通过对移动端的二次开发,将维修知识实时推送到维修现场,指导现场维修工作。移动端可远程调用后台维修知识,流程如图8所示。
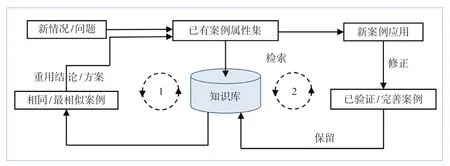
图7 维修知识推理运用
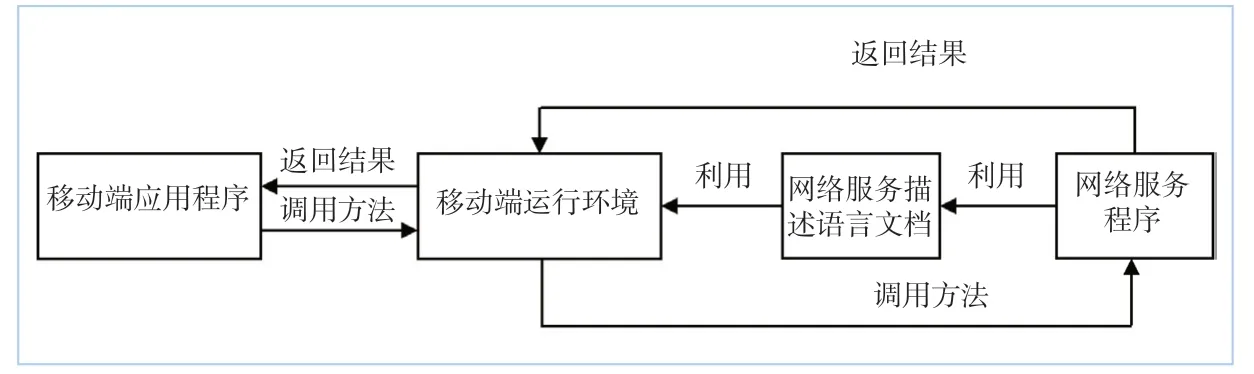
图8 远程调用维修知识流程
4 结语
目前,本文构建的基于BIM模型的扶梯智能监测系统已在襄阳东津站进行了安装测试,现场反应良好,能够实时、有效地监测扶梯运行状态,为其养护维修提供数据支持。
猜你喜欢
思维与智慧·上半月(2022年4期)2022-04-08
纺织科学研究(2021年1期)2021-12-03
小聪仔(幼儿版)(2020年12期)2020-02-01
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
小学生作文(低年级适用)(2019年5期)2019-07-26
时代英语·高一(2019年1期)2019-03-13
读友·少年文学(清雅版)(2018年12期)2018-04-04
好孩子画报(2016年6期)2016-05-14
山东青年(2016年3期)2016-02-28