
基于高分辨率数值天气模式的往返平飘式探空轨迹预测方法及初步评估
2021-06-01 04:12王金成王丹杨荣康曹晓钟郭启云
大气科学 2021年3期
王金成 王丹 杨荣康 曹晓钟 郭启云
1 国家气象中心,北京 100081
2 中国气象局数值预报中心,北京 100081
3 中国气象局气象探测中心,北京 100081
1 引言
作为地球大气观测系统的重要组成部分,探空观测能提供完整的大气三维温、压、湿、风等信息,是极其重要的大气信息来源(Faccani et al., 2009)。探空也是大气观测系统中唯一能同时提供三维大气质量场与运动场信息的观测系统,具备精度高、垂直分辨率高以及能够探测平流层等特点,已经成为大气观测网的基准观测。它广泛应用于天气预报(叶笃正, 1977a, 1977b; 王笑芳和丁一汇, 1994; 刘玉玲, 2003; 廖晓农等, 2008; 刘晓璐等, 2014; 刘超等, 2017)、数值天气预报(Radnóti et al., 2012; 郝民等, 2014; Privé et al., 2014; Ingleby et al., 2016)和卫星等遥感资料的检验评估(Kuo et al., 2005;Xu et al., 2009; Sun et al., 2010; Liao et al., 2015; 郭启云等, 2020)等领域。数值天气预报是探空资料定量应用的最重要的领域,探空资料已经成为业务数值天气预报中的重要基础资料,对减小数值模式分析场和预报场的误差起重要作用(Cardinali,2009; Zhang et al., 2018)。对俄罗斯每天减少一个时刻探空资料的敏感性数值试验结果表明,俄罗斯上空500 hPa高度场48 h预报技巧减小4%~10%(相当于数值天气预报半年的研发进展),并且其影响一直向东传播,直至影响到北半球的预报效果(Ingleby et al., 2016),这反映了探空资料对全球数值天气预报的重要性。另有研究表明,探空资料时间观测频次加倍,将显著提高数值天气预报的预报技巧(魏蕾和雷恒池, 2012; Privé et al.,2014; 卢萍等, 2016; 王丹等, 2019);针对台风或飓风的飞机下投探空资料在数值天气预报中的同化应用,能够显著减小台风或飓风路径和强度的预报误差(Moteki et al., 2007; 张诚忠等, 2012; Feng and Wang, 2019)。除了对数值天气预报的重要直接影响外,探空资料对数值预报系统有间接作用和影响(Radnóti et al., 2012),探空资料是卫星辐射率和飞机报温度等资料进行偏差订正的基准资料(Cucurull et al., 2014; Eyre, 2016),被认为是数值预报分析场的锚定资料之一,用于避免数值预报分析场和预报场偏差的漂移。
目前而言,间隔12 h时间频率的观测模式显然不能完全满足中小尺度灾害性天气的监测和预警需求,特别是在夏季汛期。为了满足数值天气预报和大气科学研究对探空资料新的应用需求,中国气象局气象探测中心研发了一种新型往返平飘式探空观测技术,该技术通过一次探空施放,实现了“上升段—平漂段—下降段”三段观测(曹晓钟等,2019)。相比传统探空技术和模式,该技术在不显著增加成本的基础上,可以实现两次对流层垂直探测(上升段和下降段)和平流层(指定高度)持续4 h的连续观测。相比我国现行的业务探空采用L波段雷达定位技术,往返平飘式探空采用导航卫星定位技术,定位更为精准。为了验证和改进往返平飘式探空技术,2018年6月10日至7月10日在安徽、湖北、湖南和江西的6个探空站点开展了为期一个月的小规模野外测试,试验数据的不确定性分析结果表明往返探空探测精度达到了WMO(World Meteorological Organization)规定的突破目标,部分探测要素甚至实现了理想目标,探测资料具有良好的可用性(王丹等, 2020),具备了很好的应用前景。
往返平飘式探空尚处于早期的研发和试验阶段,要实现大规模业务应用,仍有许多科学和技术问题需深入研究和解决。其中包括往返平飘式探空组网观测对数值天气预报的影响如何?往返平飘式探空组网所需的接收站站网如何布局?往返平飘式探空能否应用于目标观测或特定时间和区域的加密观测等?这些科学技术问题的研究均依赖于往返平飘式探空的运行轨迹模拟或预测原型系统:(1)往返平飘式探空组网对数值天气预报的影响研究需要借助观测系统模拟实验(Observing System Simulation Experiments, OSSEs),而生产模拟观测需要往返平飘式探空的模拟轨迹数据;(2)往返平飘式探空组网所需接收站站网布局需要以往返平飘式探空轨迹的气候特征为依据;(3)往返平飘式探空整个观测过程持续6 h左右(曹晓钟等, 2019),其下降点距离施放点的距离可达几百公里,使得其能够对偏远山区和大陆沿岸海洋上空开展垂直大气探测,具备了开展目标观测的潜力,但由于往返平飘式探空不具备动力,用其开展目标观测或特定时间和区域的加密观测需要开展往返平飘式探空轨迹预报,确定合适的施放地点、时间以及平漂高度等。因此,往返平飘式探空的轨迹模拟与预测对从科学上认识往返平飘式探空数值天气预报的影响、对往返平飘式探空未来大规模组网和更加广泛的大气观测应用具有重要意义。
往返平飘式探空是一种新型探空观测技术,对其轨迹模拟和预报的研究较少。曹晓钟等(2019)首次给出了往返平飘式探空在上升段、平漂段和下降段的运动动力模型,并利用全国120个探空站秋季观测的25 km高度风场作为往返平飘式探空平漂段风的初始值,在假定气球平漂时垂直方向保持静力平衡,水平方向仅受到风场影响的条件下,初步模拟了全国探空站气球平漂特征。除此之外,气球轨迹研究主要集中在航天用大负载的零压气球的轨迹模拟和预测方面(Musso et al., 2004; Dai et al.,2012; Jewtoukoff et al., 2016)。这些研究中假设气球是大气完美的示踪物,气球除了浮力外没有其他动力,根据轨迹运动方程,利用大气环境风场计算出气球轨迹。大气环境风场是影响气球轨迹模拟和预测精度的重要因素,以上研究中主要采用探空观测、全球再分析资料或中尺度模式预报输出的大气环境场用于气球轨迹预测。探空观测的时间间隔是12 h,空间分辨率约为2.5°,而再分析资料或模式预报输出的大气环境风场的时间分辨率一般为1~6 h,空间分辨率是0.1°~1.0°。采用这样时空分辨率的大气环境场开展气球轨迹预测隐含假设是大气在1~12 h内的变化是线性的,对于平流层内大尺度的大气环流系统,这样的假设和近似精度基本能够满足平漂时长达到24 h以上的航天用气球的轨迹预测。
然而,上述研究中提出的轨迹预测方法不能满足往返平飘式探空高精度轨迹预测的需求,有三个方面的原因:一是往返平飘式观测过程仅为6 h,如果仍然采用1~6 h甚至12 h间隔的探空观测、再分析场或模式输出的大气环境场直接用于往返平飘式探空轨迹模拟和预测,精度肯定不能满足需求;二是往返平飘式探空的上升段和下降阶段约有2 h,并且约有1 h的时间运行在对流层内,对流层内多中小尺度天气系统,大气环境风场在6 h内会有较大变化,采用上述较低时间分辨率的大气环境风场,会引起相对较大的轨迹误差;三是上述方法均无法考虑大气垂直速度的影响,造成上升段和下降段的计算误差较大。
为了高精度的模拟和预报往返平飘式探空的轨迹,本文提出了一种将往返平飘式探空轨迹方程和下降段降落伞的动力学方程直接嵌入高分辨率数值天气模式中的轨迹预测方法。该方法能够直接利用区域高分辨率区域数值模式积分过程中的大气环境场(水平风速、垂直速度、密度等变量),时间分辨率可以达到30 s。基于GRAPES(Global/Regional Analysis and PrEdiction System)高分辨率区域模式(水平分辨率为0.03°)初步建立了往返平飘式探空轨迹模拟和预测系统,为开展往返平飘式探空观测对数值预报的影响、往返平飘式探空的优化组网布局及往返平飘式探空在目标观测中的应用等研究工作奠定了基础。
2 往返平飘式探空轨迹预测方法
往返平飘式探空运行轨迹分为上升段—平漂段—下降段三个阶段(曹晓钟等, 2019)。在上升段,依靠探空气球套球(2个探空气球,分别称为外球、内球)的外球浮力将探空仪运送到大气高层;上升到指定高度后,外球爆破后进入平漂段,以内球作为载体携带探空气仪做近似平衡的水平运动;在平漂到达预定时间后,内球与降落伞、探空仪分离,以降落伞为载体携带探空仪进入下降段。为了实现对往返平飘式探空轨迹的模拟和预报,需要建立往返平飘式探空整个探测过程的动力和运动学方程。曹晓钟等(2019)提出了往返平飘式探空三段探测过程中的理论动力学理论模型,该动力模型中的部分物理过程复杂且部分方程参数因缺乏实验室数据支持,无法开展(如,气球内部热力学变化过程;下降段降落伞水平方向的受力与大气环境风场的关系)。为了实现往返平飘式探空轨迹的模拟和预测,需要对该动力模型进行简化。
2.1 上升段气球上升运动动力简化模型
在上升段,往返平飘式探空以内外气球作为载体,一般情况下,气球被认为是大气的完美示踪物(Dai et al., 2012; Jewtoukoff et al., 2016),气球的水平运动速度与大气风速相同,这也是传统探空气球测风的基本条件。探空气球在垂直方向受的力包括重力、浮力和摩擦力,设上升段升速为wb,则其垂直方向升速的动力方程可以表达为其中,wb是探空气球在静止大气中的垂直升速,mt是往返平飘式探空系统总质量(单位:kg),ρa是环境大气密度(单位:kg m-3),Vb是外球的体积(单位:m3),g是重力加速度(单位:m s-2),CD是外球的拖曳系数,Ab是上升段外球有效横截面积,Ff=(ρaVb-mt)g称为净举力。

方程(1)中气球上升速度由气球浮力、探空系统重力和垂直方向的摩擦力决定。精确模拟方程(1)是非常复杂的。一方面,气球热力学的模拟相对比较复杂,气球所受到的浮力是由气球的体积Vb和环境大气密度ρa决定。根据热力学方程,气球的体积由气球内所充气气压和温度分布决定,但气球在大气环境中的热力变化是非常复杂的,受到环境大气的热传导、气球内部气体的热对流、太阳短波辐射、地球和大气的长波辐射等诸多因素的影响(Gallice et al., 2011; Dai et al., 2012);另一方面,气球在垂直运动过程中的拖曳系数和流体的雷诺数有关,不同材质的气球,拖曳系数与雷诺数的关系也不相同,精确的确定拖曳系数与雷诺数的关系需要实验室试验测定,仅仅依靠探空放球试验只能近似估计(Gallice et al., 2011)。一般情况下,净举力与摩擦力在一定时间尺度上(60 s以上)近似平衡,垂直升速可以认为是匀速(Gallice et al.,2011)。为了简化起见,假设往返平飘式探空气球在上升阶段匀速上升,则上升段的动力模型简化为如下形式:

其中,c表示气球匀速上升的速度。
2.2 平漂段气球平漂运动动力简化模型
往返平飘式探空的平漂阶段,内球的浮力与探空系统的重力平衡,其垂直运动速度接近零,探空系统在指定高度做近似平衡的水平运动:

动态平衡的高度主要由充气量以及地面与平漂高度上的大气温度、压强和气球内氢气的温度、压强决定。
2.3 下降段降落伞下降运动动力简化模型
往返平飘式探空下降段由降落伞作为载体,下降过程中受到空气阻力的影响,加之大气密度的增加,下降速度随高度减小。由于降落伞理论上不同于气球,因此下降段的动力方程需要考虑3个方向的受力,曹晓钟等(2019)给出了往返平飘式探空下降段降落伞的理论动力模型。该理论模型中抬升系数和排开空气的质量等参数和变量无法确定,难于实现数值模拟。为此,假设降落伞也是大气完美的示踪物,下降过程中水平运动速度与环境大气风场速度相等,该假设条件是利用降落伞位置计算大气风场的基本条件。实际观测试验中,在降落伞是大气完美示踪物的假设条件下,利用降落伞位置直接计算了大气风场,下降段的东西风和南北风分量的均方根误差和偏差均与上升段均方根误差相当(王丹等, 2020),由于上升段气球是大气运动场的完美示踪物的假设是合理的,这就从侧面验证了降落伞是大气的完美示踪物的假设条件是合理的。在这个假设条件下,降落伞在下降过程的动力模型简化为

其中,wp是降落伞在静止大气中的垂直降落速度,Cp是降落伞的拖曳系数,Ap是下降段降落伞的有效横截面积。

其中,Topen是降落伞从开始打开到完全打开需要的时间,td是从切断平漂气球以后下降段所经历的时间。根据实际观测数据,这里设降落伞完全打开所需的时间是3 s。
2.4 往返平飘式探空轨迹方程
综上所述,往返平飘式探空在整个探测过程中均可以被认为是大气的完美示踪物,其水平运动速度与环境大气风速完全相同,气球的水平运动仅由大气环境风场决定。往返平飘式探空的轨迹方程表达如下:

其中,(x,y,z)表示往返平飘式探空的空间位置坐标(单位:m),ua、va分别是位置(x,y,z)的环境大气场南北、东西方向风速(单位:m s-1),wa是位置(x,y,z)环境大气的垂直速度(单位:m s-1),ws是上升段或平漂段气球或下降段降落伞在静止大气中的垂直速度(单位:m s-1)。根据公式(2~4),在上升段,ws=wb=c;在平漂段,ws=0;在下降段,ws=wp,降落速度可通过积分偏微分方程(4)获得。
2.5 往返平飘式探空轨迹的数值模拟实现方法
公式(2~5)是经过简化的往返平飘式探空轨迹方程组。采用四阶龙格库塔时间差分方案求解方程(5),并将其直接嵌入到区域高分辨率数值模式积分过程,直接应用区域高分辨率数值模式每步积分(一般为10~30 s)的环境大气参数,实现对往返平飘式探空轨迹进行精细化刻画,达到往返平飘式探空轨迹模拟的时间分辨率和精度的要求。往返平飘式探空轨迹积分过程中,利用插值算法计算探空系统所经过位置的大气环境参数,具体实施中采用的插值方案如下:
(1)水平方向:采用经纬度为坐标的双线性插值方案。
(2)垂直方向:对水平风速和温度采用高度坐标系下的线性插值方案,气压变量先进行自然对数计算,然后采用高度坐标系下的线性插值,并将插值结果转化为气压。
(3)时间维度:假设在数值模式每一步积分过程中,所有变量均是线性变化的,所有变量采用线性插值方案。
3 往返平飘式探空轨迹预测初步结果
基于GRAPES_MESO V5.0中尺度预报系统,采用上述往返平飘式探空轨迹预测方程,建立了往返平飘式探空轨迹预测系统,利用往返平飘式探空观测试验数据对往返平飘式探空轨迹预测能力进行了初步评估。
3.1 GRAPES预报系统简介
GRAPES是我国自主研发的具有完全知识产权的数值天气预报系统(薛纪善和陈德辉, 2008),基于GRAPES已经建立了完备的数值预报业务体系(沈学顺等, 2020)。本文采用GRAPES区域高分辨率模式系统(GRAPES_MESO)的最新版本(V5.0),该版本模式于2020年6月实现了业务化。
GRAPES_MESO V5.0水平分辨率是0.03°,垂直层数49层,模式层顶高35000 m,模式覆盖区域范围是(10°~60°N, 70°~145°E)。积分时间步长30 s,轨迹模拟采用的初始场是NCEP GFS(National Centers for Environmental Prediction Global Forecast System)提供的6 h预报场。
GRAPES_MESO V5.0对风场具有较好的分析和预报效果。其风场的分析和预报的均方根误差随高度呈现“S”型(庄照荣等, 2020)变化规律。风场的分析和预报均方根误差在200 hPa附近达到最大值,纬向风U的分析均方根误差约为2.6 m s-1左右,3 h预报均方根误差约为3.4 m s-1,经向风V的分析均方根误差约为2.7 m s-1,3 h预报的均方根误差约为3.6 m s-1;风场的分析和预报的均方根误差在50 hPa附近最小,纬向风U的分析和预报的均方根误差约为1.6 m s-1,经向风的分析和预报的均方根误差约为1.75 m s-1。详细的风场的分析和预报的均方根误差详见庄照荣等(2020)中的图7。
3.2 模拟样本选取
2018年6月10日至7月10日,中国气象局大气探测中心在长江流域中下游地区的湖南、湖北、安徽、江西4省选取6个探空站作为气球施放点。往返探空气球一日施放2次,为了避免对业务探空影响,往返探空施放时间比业务探空时间滞后约30 min。为了准确评估往返平飘式探空轨迹预测系统给的预测效果,在上述试验样本中选取上升段—平漂段—下降段相对完整,并且整个观测过程达到一定时长的试验样本作为模拟对象。选取的试验样本满足三个条件:一是平漂高度大于20 km;二是整个观测过程持续时间大于5 h;三是下降的结束高度低于2 km。经过筛选共有63个样本满足上述条件。分析发现,经过平漂后,往返平飘式探空降落点与施放点的距离均大于100 km,由于试验网络目前没有设置更多的接收机,在下降阶段信号接收不完整,这是造成下降段结束高度小于2 km,很多观测试验不完整的主要原因。
表1给出了满足条件的63个试验样本的上升段平均上升速度,平漂段平均高度,平漂段的平均时长,下降结束的高度等信息。从表中可以看出,上升段平均上升速度在4.2~6.2 m s-1之间,平均升速5.39 m s-1。平漂阶段平均持续时长17481 s(4.85 h),平均高度为27693.2 m,两项指标均达到了往返平飘式探空的设计指标,这表明往返平飘式探空相比现有业务探空系统,不仅能够增加对平流层持续约5 h的稳定观测,还能够实现在06时(协调世界时,下同)和18时对大气对流层进行间接加密垂直观测。
3.3 上升段气球上升速度
在往返平飘式探空轨迹的模拟过程中,上升段探空气球的上升速度采用表1中的每次试验上升段的平均升速。平漂高度采用每次试验的平均平漂高度。
3.4 下降段拖曳系数估计
从公式(4)可以发现,在降落伞下降达到平衡状态时,利用降落伞横截面积,探空系统的总质量以及平衡状态下的下降速度,可计算降落伞的拖曳系数。设往返平飘式探空降落到一定高度时达到平衡状态,即垂直加速度为零:


表1 用于验证往返平飘式探空轨迹预测系统的观测试验样本基本信息Table 1 Information of selected successful returned radiosonde observations for evaluating returned radiosonde trajectory forecast system evaluation

表1 (续)
将式(7)代入公式(4)中得

以安庆2018年06月11日11时施放的往返平飘式探空作为参考,其在降落阶段的末端(28000 s后),其降落的加速度近似为零,满足降落伞完全打开所需的时间是3 s,其运动可以认为达到了平衡状态,降落伞最终的降落速度为3.5 m s-1(如图1所示)。并已知往返平飘式探空采用的降落伞横截面积A=0.554 m2,下降阶段探空系统总质量mt=0.266 kg,结合降落最后阶段观测到的大气环境参数(温度Ta=257.9 K,气压Pa=916.24 hPa),利用公式(6)可以计算降落伞的拖曳系数:

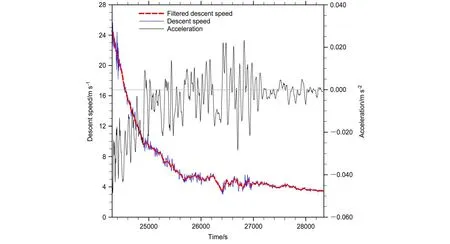
图1 安庆站2018年6月11日11时16分(协调世界时,下同)开始的往返平飘式探空下降段观测的下降速度(蓝线)、采用Lanczos滤波器滤波后的下降速度(红线)和下降段的加速度(黑线)Fig. 1 Observed (blue line), filtered (red line, using Lanczos method) descent speed of returned radiosonde, and the acceleration (black line) during descent stage released at Anqing station at 1116 UTC on 11 June 2018
一般情况下,降落伞或者气球的拖曳系数是雷诺数的函数,而雷诺数由密度、障碍物的尺度以及速度决定(Gallice et al., 2011)。雷诺数的表达式为

其中,Re是雷诺数,Rp是降落伞的半径,μ是大气的动力粘性系数。但在现有试验数据条件下,无法精确计算拖曳系数与雷诺数的关系,故假设拖曳系数在降落伞打开过程和完全打开后的下降过程中近似保持不变,在整个下降速度模拟过程中采用公式(8)计算的拖曳系数。
3.5 典型模拟个例结果分析
选取安庆站2018年6月20日11时17分施放的往返平飘式探空作为典型模拟个例,分析和评估轨迹模拟的效果。图2是观测和模拟的往返平飘式探空整个观测过程的垂直速度和位势高度。观测到的往返平飘式探空上升速度在对流层内的变化相对较小,集中在4~6 m s-1范围内,这与大气垂直运动和气球的热力变化密切相关;上升速度在平流层低层(10~16 km)附近波动较大,最大值可达10 m s-1,最小值是4.2 m s-1,这是非常有意思的现象,几乎所有观测试验均有相似的现象(图略),原因需进一步研究;上升速度在高度达到16 km以上后趋于稳定。从上述分析中可以发现,往返平飘式探空气球上升速度在上升段,特别是在对流层顶附近剧烈变动,目前原因仍然不明确。因此,采用上升速度的零级近似作为往返平飘式探空轨迹模拟和预测中气球上升速度对往返平飘式探空上升速度具有一定的代表性。在平漂段,往返平飘式探空的垂直速度仍然不严格等于零,也有一定的波动,平漂阶段中后期垂直速度在-2~2 m s-1波动,但其平均值几乎为零,说明假设平漂阶段垂直速度为零是合理的。下降段开始,往返平飘式探空剧烈下降,最大下降速度可到-26 m s-1,这是由于往返平飘式探空的气球爆破后,降落伞的打开需要一个过程,使得下降速度迅速增大;随后降落伞的完全打开后,下降速度逐渐减小。从图2中可以发现,模拟的下降段下降速度与观测到的下降速度具有较好的一致性,说明往返平飘式探空轨迹预测方法中采用的降落伞下降速度模拟方案是合理可行的,但对于该个例,垂直速度模拟值偏小。

图2 安庆站2018年6月20日11时17分施放的往返平飘式探空的垂直速度和高度。蓝(红)色实线是观测(模拟)垂直速度,蓝(红)色虚线是观测(模拟)的高度,速度方向向上为正值Fig. 2 Observed and simulated ascent speed and height of returned radiosonde as released at Anqing station at 1117 UTC on 20 June 2018. The blue(red) solid line represent observed (simulated) ascent speed, the blue (red) dashed line represent observed (simulated) height. Positive values of ascent speed represent ascending stage
图3是观测和模拟的往返平飘式探空的轨迹图。从图中可以发现:上升段模拟的轨迹与观测的轨迹十分接近,这是由于模式在对流层内的风场模拟误差相对较小;在平漂段,随着预报时长的增加,模拟轨迹与观测轨迹之间的距离逐渐增大,这与模式风场在平流层误差较大有关;在下降段,模拟轨迹与观测轨迹之间的距离变化较小。从图3中还可以发现,模拟的平漂段轨迹相对观测轨迹非常平滑,这是由于模拟轨迹采用了完全固定的高度,没有考虑探空气球在平漂过程中的热力过程和大气的密度变化。其他时刻的模拟轨迹也具有相似的特点(图略)。

图3 安庆站2018年6月20日11时17分施放的往返平飘式探空的轨迹。黑色线代表观测轨迹,紫色线代表模拟的轨迹,彩色阴影代表地形高度(单位:km)Fig. 3 Observed (black line) and simulated (purple line) trajectories as released at Anqing station at 1117 UTC on 20 June 2018. The shadings represent the terrain height (units: km)
为了评估往返平飘式探空轨迹预报系统的性能,采用模拟轨迹与观测轨迹之间的距离(轨迹误差)作为衡量往返平飘式探空轨迹预测的精度。图4是该个例模拟的轨迹误差随时间的变化。从图4中可以发现:上升段轨迹误差随时间增长相对较慢,轨迹最大误差4.2 km;平漂段轨迹误差随预报时间线性增大,轨迹误差最大可达48 km。

图4 安庆站2018年6月20日11时17分施放的往返平飘式探空预报轨迹误差Fig. 4 The forecast trajectory errors of returned radiosonde as released at Anqing station at 1117 UTC on 20 June 2018
3.6 平均轨迹预测误差
图5给出所有63个往返平飘式探空试验样本(表1)的预报轨迹误差。从图5中可以发现,大部分试验样本轨迹误差随预报时间增长,最大轨迹误差达142 km,最小轨迹误差小于10 km。从图5中还可以看到,往返平飘式探空轨迹的平均预报误差(蓝线)随着预报时间线性增大,上升段(时间小于5000 s)和下降段(时间大于24000 s)轨迹误差增长率明显小于平漂段,这可能是因为数值天气模式在对流层风场的模拟误差小于平流层风场的模拟误差。预报时长为6 h(21600 s)时,往返平飘式探空轨迹的平均模拟误差仅为39.99 km。
3.7 轨迹预测误差原因初步分析
从图5中可以发现,不同的往返平飘式探空样本的轨迹预报误差具有明显差别,6 h预报的最小误差为2.8 km,而最大的预报误差可以达114.8 km。为了深入理解较大轨迹预报误差产生的原因,选取轨迹预报误差较大的武汉站在2018年7月8日11时施放的往返平飘式探空预报结果(图5中红线)进行分析。从图6中可以看出,对流层中模式预报的风场与观测的风场非常接近,误差相对很小;在平流层中,模式预报的风场与观测的风场相差很大,模式预报的东风偏强达12 m s-1,模式预报的纬向风风速误差最大约±10 m s-1。从这些结果可以得出,模式预报的平流层风场误差较大是造成轨迹预报误差较大的主要原因。

图5 63个往返平飘式探空模拟轨迹误差(黑色线)和平均轨迹误差(蓝色线)。红线代表2018年7月8日11时武汉站个例的轨迹预报误差,是63个样本中预报误差最大的Fig. 5 The simulated trajectories errors for each sample (black line) and the mean errors (blue line) for 63 samples of returned radiosonde. The red line is the trajectory error at Wuhan station (forecast error is the largest) at 1100 UTC on 8 July 2018

图6 2018年7月8日11时武汉站往返平飘式探空个例的观测和模拟的高度(黑色)、纬向风速u(红色)、经向风v(蓝色)。实(虚)线表示观测(模拟)值Fig. 6 Observed and simulated height (black lines), zonal wind u (red lines), and meridional wind v (blue lines) of returned radiosonde case at Wuhan station at 1100 UTC on 8 July 2018. The solid (dashed) lines represent observed (simulated) values
4 总结和讨论
本文提出了一种基于高分辨率数值天气模式的往返平飘式探空轨迹预测方法,该方法的主要特点是将往返平飘式探空轨迹方程与下降段降落伞的动力学方程嵌入到数值天气模式中,直接利用高分辨率数值天气模式预报高时空分辨率的大气环境场,实现了对往返平飘式探空轨迹的高精度预报。为了较精确的模拟往返平飘式探空下降段的垂直速度和轨迹,本文首先详细推导了往返平飘式探空下降段降落伞的动力学过程,并利用观测数据分析确定了下降段的开伞过程所需时间和减速下降过程中的拖曳系数。进而,利用GRAPES_MESO高分辨率数值模式建立了往返平飘式探空轨迹预测系统。利用该轨迹预测系统对63次往返平飘式探空观测轨迹进行模拟和评估,结果表明该轨迹预测系统能够较好地模拟往返平飘式探空下降段垂直速度,并具备了往返平飘式探空轨迹模拟和预报能力,能够较精确的预报往返平飘式探空的运行轨迹,预报6 h的平均轨迹误差小于40 km。本文发展的往返平飘式探空轨迹预报系统为开展往返平飘式探空组网观测模拟仿真和开展往返平飘式探空模拟观测同化影响试验奠定了基础,为往返平飘式探空在目标观测中的应用提供技术支撑平台,为未来探空仪器的回收再利用奠定了基础。
往返平飘式探空轨迹预测误差主要源自三个方面,一是数值模式预报的大气环境场存在不确定性,特别是平流层风场的不确定性较大;二是模式初始场的误差;三是往返平飘式探空上升阶段和平漂段探空气球热动力学模拟的不确定性造成的垂直速度模拟误差和下降段降落伞降落速度的模拟误差。随着模式改进,特别是模式对平流层风场预报误差的减小,未来往返平飘式探空轨迹预测系统的预报误差也会显著减小。本文建立的往返平飘式探空轨迹预测系统中,假设在静止大气中,往返平飘式探空气球在上升段保持匀速上升,在平漂段垂直速度为零,这样的假设精度相对较低(图2)。对上升段和平漂段气球的热力学、动力学精确模拟可以进一步提高往返平飘式探空轨迹模拟和预报的精度,为此未来将对往返平飘式探空探空气球在上升段和平漂段的热力学、动力学过程开展深入研究。
猜你喜欢
成都信息工程大学学报(2021年3期)2021-11-22
宇航学报(2021年6期)2021-08-13
军事文摘·科学少年(2020年4期)2020-06-08
北京航空航天大学学报(2019年9期)2019-10-26
制导与引信(2017年3期)2017-11-02
高原山地气象研究(2016年1期)2016-11-10
化工学报(2015年8期)2015-11-26
哈尔滨商业大学学报(自然科学版)(2014年4期)2014-08-21
现代防御技术(2014年5期)2014-02-28
河南科技(2014年14期)2014-02-27
