水下清淤车性能研究及工程应用*
2021-06-06 09:52黎宙彭建平程阳锐彭赛锋李小艳
采矿技术 2021年3期
黎宙,彭建平,程阳锐,彭赛锋,李小艳
(长沙矿冶研究院有限责任公司 深海矿产资源开发利用技术国家重点实验室,湖南 长沙 410012)
0 引言
由于防洪和环保的需要,人们经常要对沉积在水底的淤泥进行清理。目前,常用的河道清淤方式有抓斗式、泵吸式、普通绞吸式、环保搅吸船等,大多依靠船载设备进行工作,在浅水和宽阔的河道湖泊中具有较好的清淤能力,但是在深水以及狭窄空间内则很难进行施工作业[1−2]。我国水库多选择在高山峡谷地区建坝,最大坝高已超过300m。相较于湖泊和河道清淤,水库清淤具有坝前水深大、水深变化范围大、淤积物粒径差别大等特点,且水库多建于内陆地区,不具备通航条件,大型挖泥船难以进入[3]。国内的江苏气力泵疏浚系统虽然疏浚深度可达160m,能进行淤泥、粉细砂等细颗粒松散淤积物清淤工作,但整体还是存在系统体积大,难以适用于孔洞清淤等问题[4]。
水下清淤车系统包括集绞吸和淤泥输送功能为一体的自行式履带清淤车,在岸上的配套铠装缆绞车及综合控制室等,设备均可采用汽车单独运输,到场后无需再进行组装,调试完成后即可进行清淤工作。由于清淤车体积较小,能适用于水下孔洞及其它各种深水清淤环境。本文主要对清淤车的各项作业性能进行试验分析,并对其工程应用的效果进行简要介绍。
1 设备作业性能
针对河湖与水库深水区域和特定环境下的孔洞清淤问题,研制了一台适用于深水环境和孔洞的自行式履带清淤车(见图1)。清淤车主要由履带行走装置、车体机构,清淤及输送系统、液压系统、环境监测及控制系统等组成;通过光电铠装缆进行动力和信号传输,在岸上远程遥控进行操作,可适应不同环境下的清淤作业。设备的相关技术参数见表1。

图1 清淤车实物照片

表1 水下清淤车相关技术参数
在试验室对清淤车陆地和水下作业性能分别进行试验研究,主要从设备的行走性能,越障能力,控制操作和清淤作业等方面进行试验,以保证设备水下作业的安全性和可靠性。
1.1 陆地行走性能试验
清淤车陆地行走试验主要检测设备的行走作业性能,通过模拟不同水下地形,对清淤车行走、爬坡能力进行测试,利用清淤车搭载的惯导装置和监测传感器,对不同工况下行走状态和左右履带驱动马达的流量功率特性进行分析。
清淤车的陆地行走测试包括陆地直线行走,直角转弯、陆地速度测试和爬坡试验等。试验中,清淤车在试验场水泥平地和16°的斜坡砂石地行走性能均良好[5]。
图2为清淤车在自动控制程序下沿设定的航向直线行驶,行走时间为75 s,航向角为357°,实时角度偏差在1°范围内波动;在直角转弯试验中,初始航向为252°,经过约20 s的转弯调整后,航向稳定在357°。试验证明清淤车在陆地行走具有良好的直线行走和转弯行走能力。
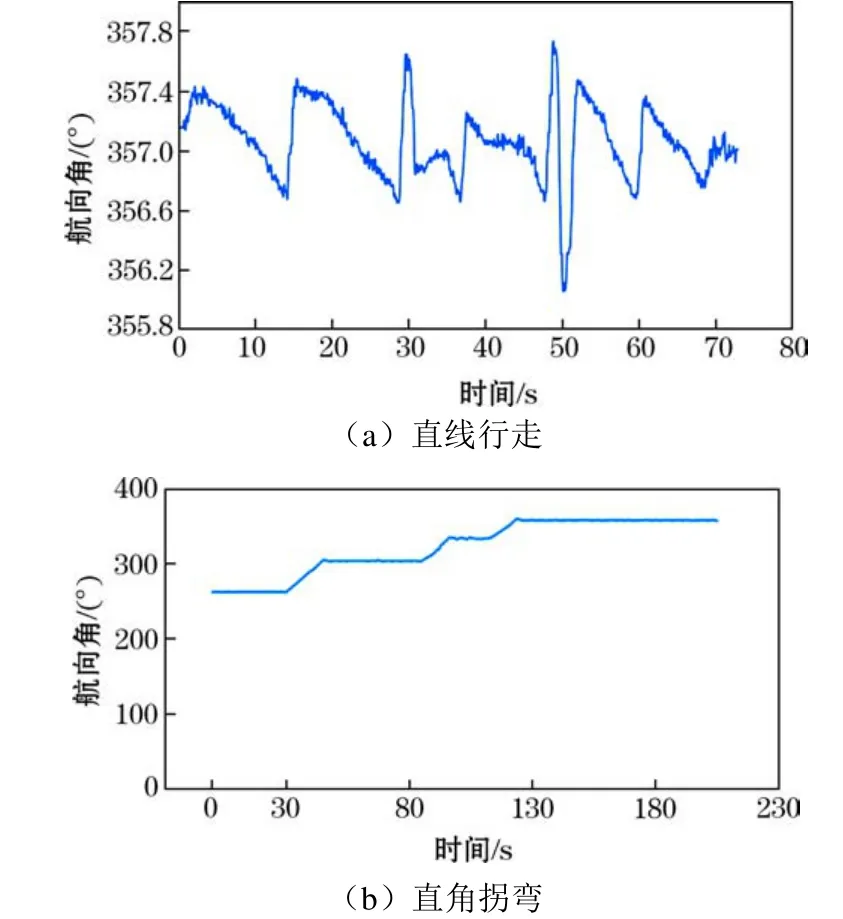
图2 清淤车陆地行走航向曲线
对清淤车陆地行走速度进行了测试,在前进试验中,测得13.3 s内行走了10.7m,平均速度为0.8m/s,在后退试验中,在13.4 s内行走了10.6m,平均速度为0.79m/s。设备行走时左右履带马达的流量曲线如图3所示,随时间的变化,左右履带的流量基本保持不变,说明清淤车的左右履带行走速度匹配且能保持在设定的范围内。
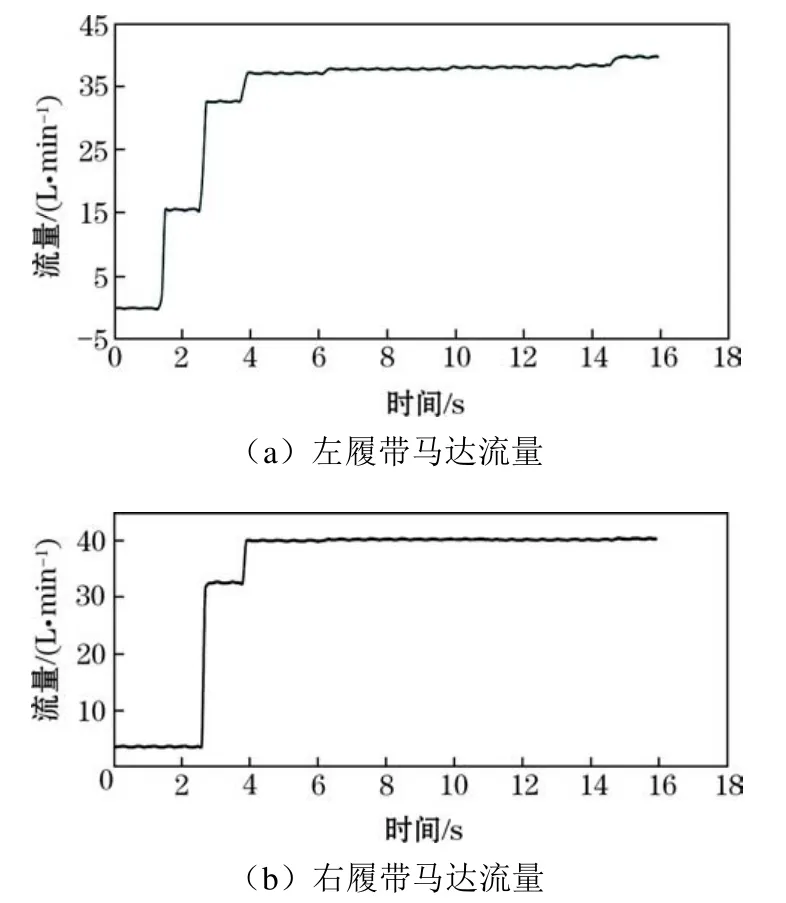
图3 清淤车左右履带流量随时间变化曲线
清淤车行走时左右履带功率变化见图4,两条履带功率在此工况下行走时,数值基本保持稳定,左履带平均功率为5.03 kW,其绝对偏差平均值为1.86;右履带平均功率为6.22 kW,其绝对偏差平均值为1.01。
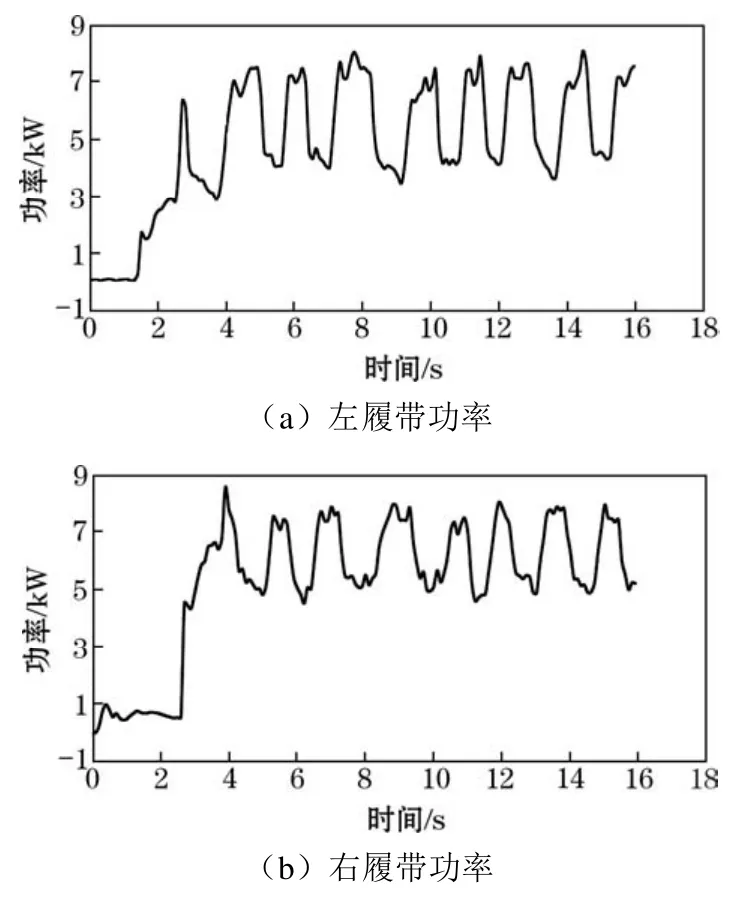
图4 清淤车左右履带功率随时间变化曲线
1.2 水下行走性能试验
清淤车的水下行走测试在试验水池中进行,通过远程控制设备行走在模拟水底淤泥环境中,试验测得在10m的距离内,清淤车的行走时间为13 s,计算可得最大速度约为0.76m/s。
在水下行走时,通过系统数据监控,清淤车航向角变化如图5所示,可知设备在水下定向行走时,自动控制程序可根据惯导反馈的航向数据及时对清淤车履带行走速度进行调节,使其保持稳定的方向继续前进,航向偏差在1°范围内。
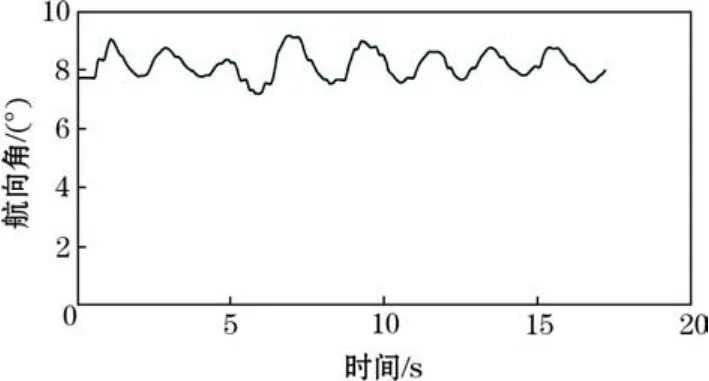
图5 设备行走时航向角变化曲线
在水下地形环境未知的情况下,可根据设备的横滚角和俯仰角对设备的行走状态进行判断,其中横滚角表示设备左右倾斜角度,俯仰角表示设备前后的倾斜角度,如图6所示,根据数据判断,设备可在倾斜2°~3°范围内行走在凹凸不平的水底。
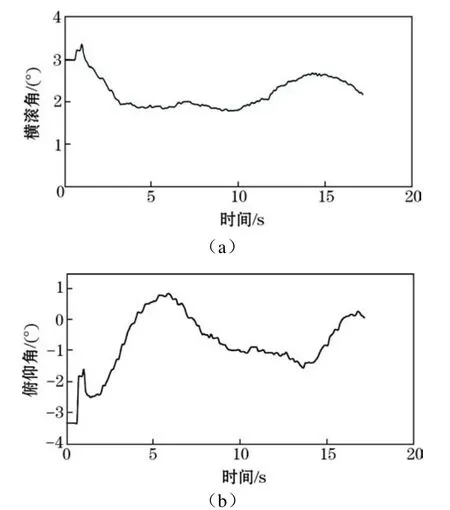
图6 设备行走时横滚角及俯仰角随时间变化曲线
图7为清淤车水下行走时左右履带柱塞泵流量变化曲线,从设备启动至稳定行走后,左右履带流量基本保持稳定,说明清淤车水下行走时能保持稳定的速度,对于水下稳定的清淤具有较好的基础。
清淤车从启动至正常行走后,两条履带功率曲线变化基本一致,其中左履带功率为6.76 kW左右,数值绝对偏差的平均值为2 kW;右履带功率为8.53 kW左右,数值绝对偏差的平均值为0.7 kW。陆地测试时,左右履带行走平均功率分别为5.03 kW和6.22 kW,计算可知,清淤车水下行走时左右履带功率值分别比陆地行走大25%、27%,因为水下行走时还包括水阻力及淤泥的黏附力等。
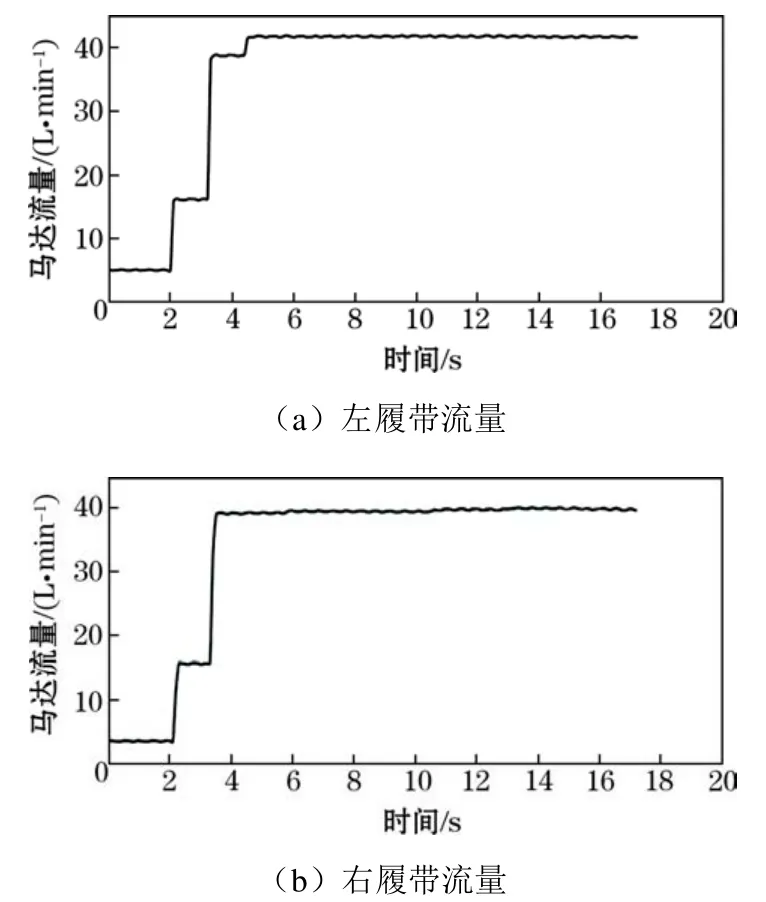
图7 左右履带流量变化曲线
1.3 绞吸输送能力试验
绞吸输送能力试验用于对清淤车进行绞吸能力和淤泥的输送能力试验,具体包括泵流量测定试验和清淤浓度试验。输送泵在进行绞吸试验时,通过安装在泵出入口的压差传感器对输送泵的工作状态进行监测,如图8所示,泵出入口压差的平均值约为36 kPa左右,在正常的区间内波动,波动范围绝对偏差的平均值为2.6 kPa,说明输送泵能进行稳定的淤泥输送,满足此工况下的输送要求,无堵塞情况发生。
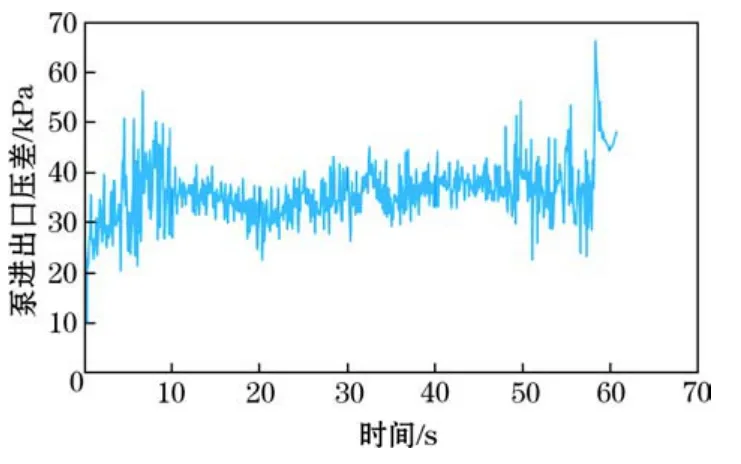
图8 输送泵进出口压差随时间变化曲线
输送泵流量及浓度的测定试验采用人工标定的方法进行。通过标定箱对输送泵的流量进行测算,测得2min内输送泵输送的体积为5.3m3,计算可得输送泵此工况下的流量为159m3/h。在进行连续清淤试验时,选取流量稳定的一段进行清淤浓度标定,在多次标定试验后,测得砂石的体积平均值为0.025m3,水和砂石混合物总体积平均值为0.124m3,因此,可得输送体积浓度为20%左右。
2 工程试验应用
2019年12月,为解决深孔泄水建筑物孔洞淤塞或闸门卡死等问题,清淤车在小浪底枢纽排沙洞进行了孔洞模拟清淤试验,通过布放设备至排沙洞外,利用清淤车的综合导航定位系统,控制设备行走至排沙洞内,将洞内的淤积物绞吸后通过软管输送至洞外。
清淤车着底后,由于水质浑浊的影响,水下灯光摄像系统能见度很低[7],不能对周围环境进行准确识别,只能通过图像声呐和惯导综合导航定位的方式,完成孔洞的寻找及孔洞清淤作业,图9为图像声呐寻找到排沙洞以及清淤车进入排沙洞后开展清淤作业的监控画面[8−9]。
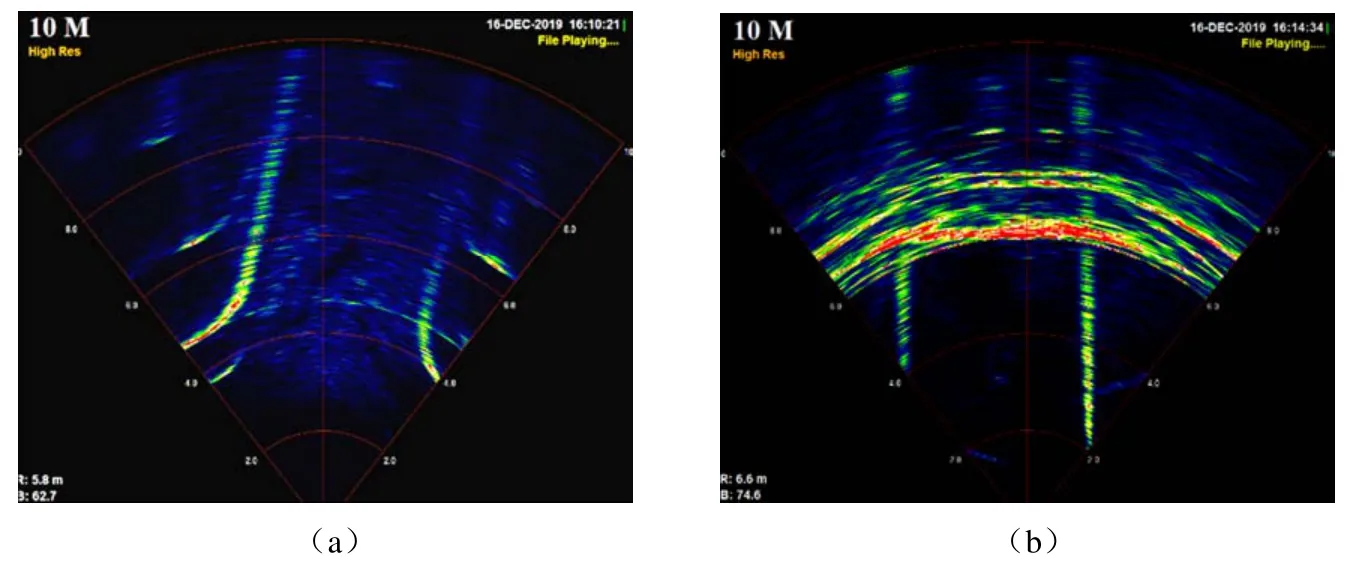
图9 清淤车图像声呐孔洞环境感知
3 结论
本文针对河湖与水库深水区域以及特定环境下孔洞的清淤问题,提出了一种深水清淤车的清淤作业方法,并通过陆地性能、水下作业和清淤功能在内的一系列实验室试验,对清淤车的行走、控制、绞吸和输送能力等进行了研究。试验结果表明,清淤车在陆地行走的前进速度最大约为0.80m/s,后退速度最大为0.79m/s;在水下行走时平均速度为0.76m/s;且相同速度下,水下行走的履带功率比陆地 行走大25%左右;清淤车可在16°的斜坡自由行走;在水下清淤输送试验中,淤泥的输送浓度为20%。清淤车及系统成功地在小浪底水利枢纽进行了工程应用试验。
猜你喜欢
建材发展导向(2021年19期)2021-12-06
中国石油石化(2021年8期)2021-03-30
工程技术研究(2020年4期)2020-04-17
石油化工建设(2019年6期)2020-01-16
建材发展导向(2019年7期)2019-11-29
林业工程学报(2017年4期)2017-08-07
科技与创新(2017年10期)2017-06-07
中国高新技术企业(2015年10期)2015-03-19
橡胶工业(2015年4期)2015-02-23
制造业自动化(2014年21期)2014-12-18