
自主分拣机器人视觉系统的快速标定分析
2021-06-06 06:43赵森
内燃机与配件 2021年9期
关键词:标定


摘要:为了能够进一步促进在视觉引导基础上机器人自主分拣系统的生产效率和生产质量,本文特对分拣机器人的三维视觉系统的快速标定方法进行分析与研究。利用分布在不同空间点的同坐标系进行表示,而后提出三维标定块角点构建多个弓箭手坐标系的标定方法。根据标定块角点坐标值在视觉坐标系下的求解问题,特提出基于局部点云拟合平面,而后对分析解立方程组的具体方法。本次所提出的标定方法只需要采集一次三维标定块点云和拖动机械臂末端的探针对标定块的三个角点进行接触,而后就可以直接对所需要的数据进行采集。
关键词:三维标定块;点云;分拣机器人;平面拟合;标定
中图分类号:TP3 文献标识码:A 文章编号:1674-957X(2021)09-0206-02
0 引言
从机器人自主分拣系统的角度上来说,在以视觉为指引的情况下,视觉定位可以被视作是一种非接触性的测量方法。与常规意义上的接触性测量方法相对比,本方法的优势是非常确切的,在机器人自助作业系统中的应用也是非常广泛的,为促进整套系统工作质量水平的进一步提升,发展至今已经有很多这种非接触测量、检测系统校准、测量方法改进以及逆向工程的相关研究。众所周知,利用3D扫描仪等三位视觉传感器,用其获取点云,而后对作业信息进行分析可以直接对视觉传感器坐标进行定义,在 机器人执行作业信息前,需要通过一定的手法对其进行转换,并建立与基坐标系的对应关系,此过程中就涉及到了对机器人视觉测量系统进行标定的问题。
1 标定问题的相关概述
针对机器人的视觉系统,最基本功能:操作点检测工作,然后通过具有末端刀具属性的导引方式直接控制机器人做出的各个动作。标定环节要从机器人视觉系统坐标系、关节坐标系变化矩阵两个方面,实施科学有效的拟合。
如图1如所示,机器人视觉测量系统中的视觉传感器装置,安装在分拣机器人视觉系统标定坐标系的第六个关节上。在坐标系的整个过程中,世界坐标系和基准坐标系基本重合,同时沿机器人第6关节固定三维视觉传感器装置从这一角度上来说,在对机器人视觉测量系统进行标定的过程当中,核心的目的在于找准机器人基座坐标系与第6关节坐标系之间的对应转换关系。
另外,从图1可以看出,三维视觉传感器的固定,是以分拣机器人第六个关节为主要位置。若视觉系统坐标系的对应空间中其中一个目标点坐标值记为SX,那么机器人坐标系目标点坐标值BX的公式如下:
B_(X=(_6^B)T_S^6 T^S X) (1)
上述公式中,B6T代表机器人第6关节坐标系对应的机器人坐标系变化矩阵;6ST代表视觉系统坐标系对应机器人第6关节坐标系变换矩阵。
2 标定方法
针对标定方法的讨论,其核心为多点约束,机器人视觉测量系统第6关节坐标相对于视觉系统坐标系的矩阵的变化关系进行拟合处理,当中所涉及到的多点即意味着三维标定的角点(即机器人视觉测量系统中三平面的相交点),实际工作中可以通过构建平面方程的方式对角点坐标参数进行可靠计算。
2.1 利用RANSAC算法拟合平面
本文所提出的算法基于随机采样的方式生成拟合平面。将含有大量异常数据的样本数据集合定义为RANSAC,在对其进行计算并生成数据数学模型的情况下,是可以按照该方式证实算法的可靠性与有效性,但需要引起注意的一点是,对于RANSAC而言,有效样本数算法的基本假设只得样本中既包含正确数据,又囊括异常数据,以上数据的产生可能是错误的假设、测量、计算导致。
RANSAC算法拟合三维标定块平面流程,如图2。
由图2可知,RANSAC算法拟合三维标定块,再确定标定块其中一个面点云,而后随机选择三个,三点成面,这样就可以得到准确的参数,而后对该面的距离进行对比,并对平面的参数进行适当的调整,这样就可以得到一个具有点最多的平面。
2.2 標定分拣机器人的视觉系统
拟合后得到三维校准试块感测点的相关平面。然后计算出三个平面的交点,获取机器人视觉坐标系S中的所有三维标定块角度坐标值。通过机器人的探头参数和运动学计算出检测条件下标定块的转角,最终得到机器人基座坐标系B的坐标值。
为了对分拣机器人三维视觉系统进行标定,则需要构建相对应的机器人基坐标系的工件坐标系PB与相对应的机器人视觉系统坐标系的工件坐标系PS。
2.3 分拣机器人的内燃机
本次采用一汽锡柴展出的国四排放发动机。该发动机采用自主研发的智能电机驱动热端EGR系统,解决了该系统在中重型商用柴油机上应用的技术难题。
针对以上阐述标定方法在实践中的可行性进行验证,需要有标定实验平台。分别展开分拣机器人三维视觉系统的快速标定、检测精度检验。
2.3.1 搭建实验环境
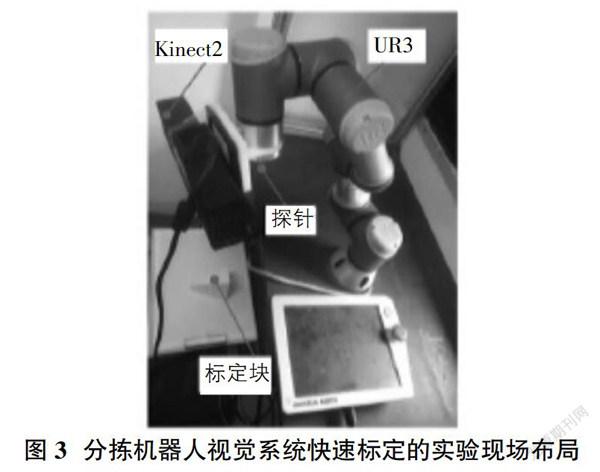
检验搭建的标定实验平台如图3所示,主要是由探针、三维标定块、机器人、三维视觉传感器组成。
具体材料如下:机器人:新松机器人公司生产,型号:SCR3,负载:3kg,工作范围为:600mm,理论重复定位的精确度为:±0.02。
三维传感器:微软公司生产,型号:kinect2,深度传感器测量精度范围1-2mm,距离0.5-4.5mm。机器人末端固定视觉传感器,不影响机器人正常旋转。
探针和用来固定探针的法兰盘长度在64.02mm,在机器人的末端固定,机器人的第6关节坐标系和探针中心线重合,所设计的标定块角点在X、Y、Z轴向均有比较大尺寸差异。
2.3.2 分拣机器人三维视觉系统快速标定实验
通过以上分析的标定方法,标定机器人视觉系统。开始创建标定块,对机器人姿态实施调整。获取标定块点云拟合4个平面。最后计算出同时标定试块转角处3个平面交点,得标定坐标。而且这些角点的坐标可以采用视觉系统坐标进行表述。
2.3.3 分拣机器人三维视觉系统的精度实验
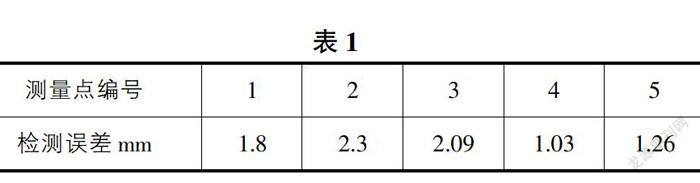
为了验证快速标定方法的准确性,本实验随机选取了5个位置,然后将标定试块放置在这5个位置上,每个位置是不同的。机器人基础坐标系对应的理论坐标值、视觉传感器测量坐标值的欧氏距离,数据如表1。
由表1可知,标定后视觉测量系统的最大检测误差为2.3mm,平均绝对误差为1.7mm。由于迭代学习控制器是一种基于修改控制信号的迭代学习控制器,所以总结经验后研发零相位滤波器,采用迭代学习的方式,展开输入信号、控制信号处理,以期加强XY平台跟踪性、降低轮廓误差。
3 结论
总之,双迭代学习控制器的应用,如果迭代次数比较少,所呈现的系统跟随性能也相对良好,具有结构简单、操控便捷的特征,而且也可以在实际工程中应用。尤其是在我国工业生产领域,工件分拣是其中非常关键的一部分,但以往采用的人工分拣这种方式,不仅效率不高,还面临重复劳动的现象。采用自主分拣机器人视觉系统,可以解决传统分拣存在的弊端,有效提高分拣效率、减少重复劳动现象,也有效加强了分拣精准率。在其中应用视觉分拣技术,相机所在视野范围内都可以进行分拣,使分拣工作更具智能化。通过自主分拣机器人视觉系统快速标定,减小误差,为今后工件分拣技术的创新与研发提供方向。
参考文献:
[1]李省委,王伟.组合机器人及视觉检测搬运控制系统实验平台设计[J].沈阳工程学院学报(自然科学版),2021,17(01):42-45.
[2]陈曦,杨古涵,韩燕祥.自动驾驶机器人关键技术及应用分析[J].中国设备工程,2021(01):214-215.
[3]任芳.货到机器人拣选:技术升级前景向好[J].物流技术与应用,2021,26(01):58-60.
[4]裴汉华,秦会斌.基于双目视觉的智能送餐机器人系统设计[J].电子技术应用,2021,47(01):96-99.
[5]贾科.基于机器视觉的汽车零部件自动分拣系统设计[J].汽车文摘,2021(01):48-52.
[6]林俊义,吴雷,杨梅英,张雪枫,江开勇.大型自由曲面零件的机器人视觉快速定位方法[J/OL].计算机集成制造系统:1-13[2021-02-02].
[7]陈宏斌,邹树梁,邓骞,段伟雄.多功能破拆机器人工具头换装可视化研究[J].南华大学学报(自然科学版),2020,34(06):78-85.
[8]康志飞,同雯婷,馮雨晴,魏元,屈毅.NAO机器人足球运动与基本动作技术开发[J].电子世界,2020(24):152-153.
作者简介:赵森(1987-),男,辽宁沈阳人,学士,现从事工业机器人应用设计工作。
猜你喜欢
科技研究·理论版(2022年4期)2022-07-15
江苏农业科学(2022年6期)2022-04-15
汽车与新动力(2021年1期)2021-09-10
现代信息科技(2019年22期)2019-09-10
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
