
不同形状摆翼推进器水动力性能的数值预报
2021-06-08 07:04张生浩梅蕾周军伟
中国舰船研究 2021年3期
张生浩,梅蕾,周军伟
哈尔滨工业大学(威海)海洋工程学院,山东 威海 264209
0 引 言
生命诞生于海洋,经历了数十亿年的物种选择与进化,造就了数以万计的 “流体力学大师”—海洋生物。鱼类作为常见的水生生物,遍布于江河湖海,大多数鱼类通过摆动尾鳍产生推力,在水中机动灵活,拥有极高的推进效率[1-2]。人们通过观察鱼类的生物构造与运动特性,总结提取了物理原理及运动规律,并将其应用于仿生推进器设计,摆翼推进器即是这样一种模仿鱼类波状游动的新型推进装置。相比传统推进装置,摆翼推进器拥有极高的航行效率、较低的噪声污染、较强的机动性能等优势,近年来日益成为科研工作者关注的热点问题。
Zhu[3]研究指出柔性鱼尾是水生动物提高运动效率的重要机制,其流固耦合作用能够进一步提高推进效率。Iverson等[4]指出柔性水翼比刚性水翼会产生更高的推力值,也具有更高的推进效率,但柔性水翼存在大量的控制参数,不利于变量控制。Anderson等[5]研究发现在一定条件下刚性水翼的推进效率仍高达87%,远高于目前主流的螺旋桨推进器。
从研究现状来看,基于二维水翼求解,忽略水翼的三维效应,化繁为简的研究已经取得了大量的理论和实验成果。然而,真实的三维流动不同于二维的情况,由于绕流在上、下翼面会产生压强差,三维水翼表面的流动存在展向速度,所以会形成尾涡层,从而在翼尖处向下游卷成2个旋向相反的喇叭状旋涡[6],产生诱导阻力耗散能量。特别是小展弦比的水翼,翼尖涡与前缘涡相互作用强烈,对流动产生的影响不容忽视。因此,本文将对三维水翼进行数值仿真,研究多种形状的水翼水动力性能变化规律,以为摆翼推进器的设计提供参考。
1 摆翼推进器
1.1 几何参数
本文探究了水翼的展弦比AR、根梢比TR、前掠和后掠对水动力性能的影响。图1为模型投影形状,定义水翼展长为H,翼根弦长为c,翼尖弦长为c′,展弦 比AR=H/c,根梢 比TR=c/c′。因水 翼左右对称,各算例均使用半模计算,取c=0.2 m。
对所定义形状的水翼建模,通过不同几何变量的组合,生成23种水翼模型。其中,矩形翼有8种不同的展弦比,梯形水翼、前掠及后掠水翼分别有5种根梢比。考虑到三维效应可能是影响梯形水翼、前掠及后掠水翼性能的重要因素之一,选择AR适中且能体现三维效应的水翼作为初步探讨,此处选择AR=4。对每种模型进速Vx=0~8 m/s时的13种工况进行数值仿真,模型详细信息如表1所示。
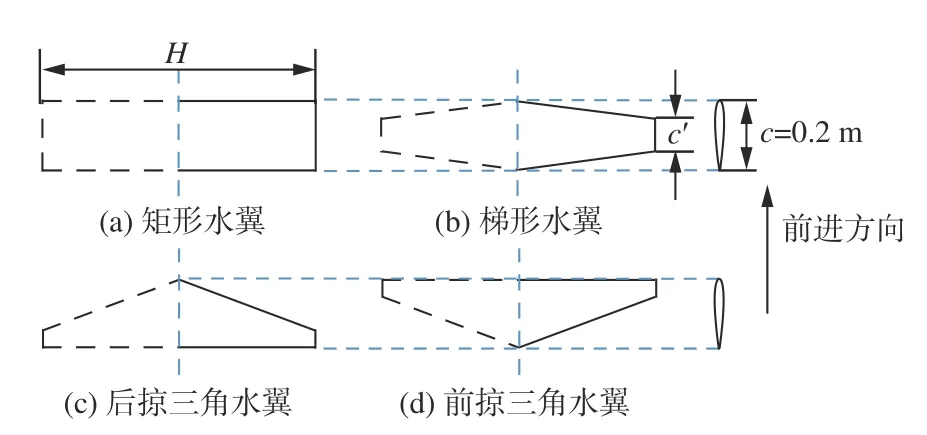
图 1 水翼投影形状示意图Fig.1 Schematic diagram of foil projection

表 1 算例详情Table 1 Details of simulations
1.2 运动描述
参照文献[7],设置水翼为含前进(x方向平移)、横荡(y方向振荡)、艏摇(绕z轴旋转)的三自由度耦合运动,水翼运动使用绝对坐标系xoy,如图2所示。图中,Fx,Fy分别为水翼x,y方向的受力,T为摆动周期,B为横荡扫掠宽度。水翼匀速前进,横荡、艏摇运动均为正弦规律。横荡运动 方 程 为Y=Y0sin(2πft), 其 中:Y为 横 荡 位 置;Y0为最大横荡摆幅;f为摆动频率;t为时间。艏摇运动方程为 θ=θ0sin(2πft+φ), 其中:θ为艏摇摆角; θ0为最大艏摇摆角;φ为横荡运动和艏摇运动的相位差(旋转运动参考点为镜像面内翼型导缘顶点)。
本文取Y0=0.5m ,摆幅比Y0/c=2.5,f=1Hz,θ0=0.3rad,φ=π/2,对此模型情况进行计算。一个周期内水翼运动、受力的情况如图2所示。
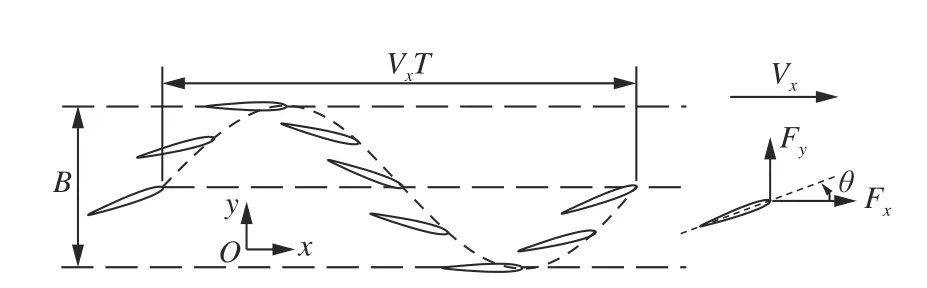
图 2 水翼运动、受力情况示意图Fig.2 Schematic diagram of foil motion and force
1.3 性能参数

由式(1)可知,在f和B一定的条件下,改变Vx值即可得到不同的J。本文水翼运动的不同工况即指不同J时的工况。
许多文献采用斯特劳哈尔数St代替进速系数来描述摆翼的不同工况,两者关系为


参照螺旋桨性能参数的定义,以水翼扫掠面积BH为参考面积,以fB为 参考速度,推力系数KT为
式中, ρ为水介质密度,ρ=1 000 kg/m3。
按相对速度计算,摆翼推进器工作时的雷诺数Re为

式中:ν为运动黏度系数,ν=10-6m2/s。本文各工况下Re均在 0.6×106~1 .7×106范围内。
定义一个周期内横荡运动与艏摇运动瞬时功率的积分均值为平均输入功率:

式中:Vy为水翼的y向速度;Mz为水翼绕z轴的力矩; ωz为瞬时角速度。
定义一个周期内平均推力功率与平均输入功率的比值为推进效率η:
2 数值方法
2.1 控制方程
FINE/Marine 是NUMECA 公司开发的模拟船舶流体流动的专业CFD 软件包,集成了EMN公司开发的ISIS-CFD流动求解器,可满足水翼多自由度耦合运动的流场模拟要求。其所采用的控制方程如下:
1) 连续性方程。

2) 动量守恒方程。
式中: Ω为控制体体积;A为 控制面;V为流场速度;Vi为即V的i分量,方向与xi轴一致;Vd为控制体表面运动速度;n为 控制面法向量; τij为黏性流体应力张量;p为压强。
算例的湍流模型均选择SSTk-ω模型[9],该模型是CFD中普遍应用的双方程涡流黏度模型,其考虑了湍流切应力传递的影响,在逆压梯度和分离流中表现优异。
2.2 网格划分与边界条件
1) 网格划分。
NUMECA系列软件中的HEXPRESS模块生成的是全六面体非结构网格,网格由体到面生成。在物面附近生成的贴体网格,能准确描述物体的外形。计算域内绝大部分网格单元都接近于长方体,网格的正交性较好,质量较高,能达到很高的计算精度,并能很好地模拟黏性边界层。
本文对计算域网格进行四级加密,在水翼表面及后方位置加大网格密度,以捕捉水翼摆动产生的尾流旋涡。表2所示为计算域网格划分情况。
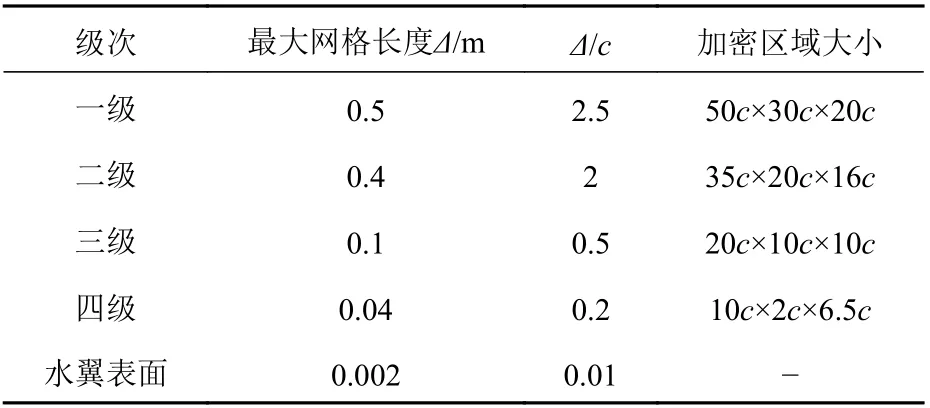
表 2 网格划分情况Table 2 Meshing details
网格分级划分区域如图3所示,由于水翼及其运动均关于xoy面对称,所以算例均采用半模计算。

图 3 网格分级划分示意图Fig.3 Schematic diagram of grid classification
NUMECA系列软件支持Python语言编写的脚本文件,可对网格划分的操作步骤进行录制,本文所有算例采用录制脚本文件的方法,批量生成相同的网格,因水翼表面积不同,故体表网格数目不同。表3所示为各种形状的水翼网格数量。

表 3 各水翼网格数Table 3 Numbers of mesh
为方便网格捕捉图形,同时方便后期制作,对翼型尾缘使用了直线尖化处理,水翼表面网格即翼型周围网格如图4所示。

图 4 不同翼型表面网格示意图Fig.4 Schematic diagram of surface meshing with different foils
2) 边界条件。
图5所示为算例边界条件。其中:水翼表面为物面边界,并采用壁面函数; 水翼前方为远场(无限远来流,速度为0);左、右侧和后方均为零压梯度(第2类Neumann边界条件,即∂p/∂n=0);上方为描述压力(第1类Dirichlet边界条件,计算域重力沿z轴矢量方向),下方为镜像边界(速度场与镜像平面相切,即Vmir×n=0)。

图 5 边界条件示意图Fig.5 Schematic diagram of boundary conditions
2.3 数值方法验证
1) 实验对比。
Schouveiler[10]观测了NACA 0012翼型在Y0=0.075 m,f=1.2 Hz,St=0.45,最大攻角为20°工况下的尾涡,与本文在相同工况下的数值模拟结果进行对比,结果如图6所示。由图可见,尾涡形状非常接近。在尾涡刚脱落的阶段,水翼尾涡面发生卷曲,出现“合并”及“缠绕”现象,局部地方的涡量发生集中,连续的涡量最终发展成一列离散的集中涡,旋向相反,交替排列在运动轨迹两侧,形成反卡门涡街。

图 6 尾涡对比图Fig.6 Contrast diagram of trailing vortex
文献[10]同时给出了St=0.3,f=0.8 Hz,最大攻角20°(对应摆角幅度约23.3°)工况下的受力随时间的变化曲线,图7所示为与本文计算结果的对比。图中,黑线为文献[10]的实验结果,红线为本文数值模拟结果)。由图可见,Fx和Fy的对比中,本文结果与实验结果吻合较好,Mz由于绝对值较小,较难分辨,二者峰值大致相近。
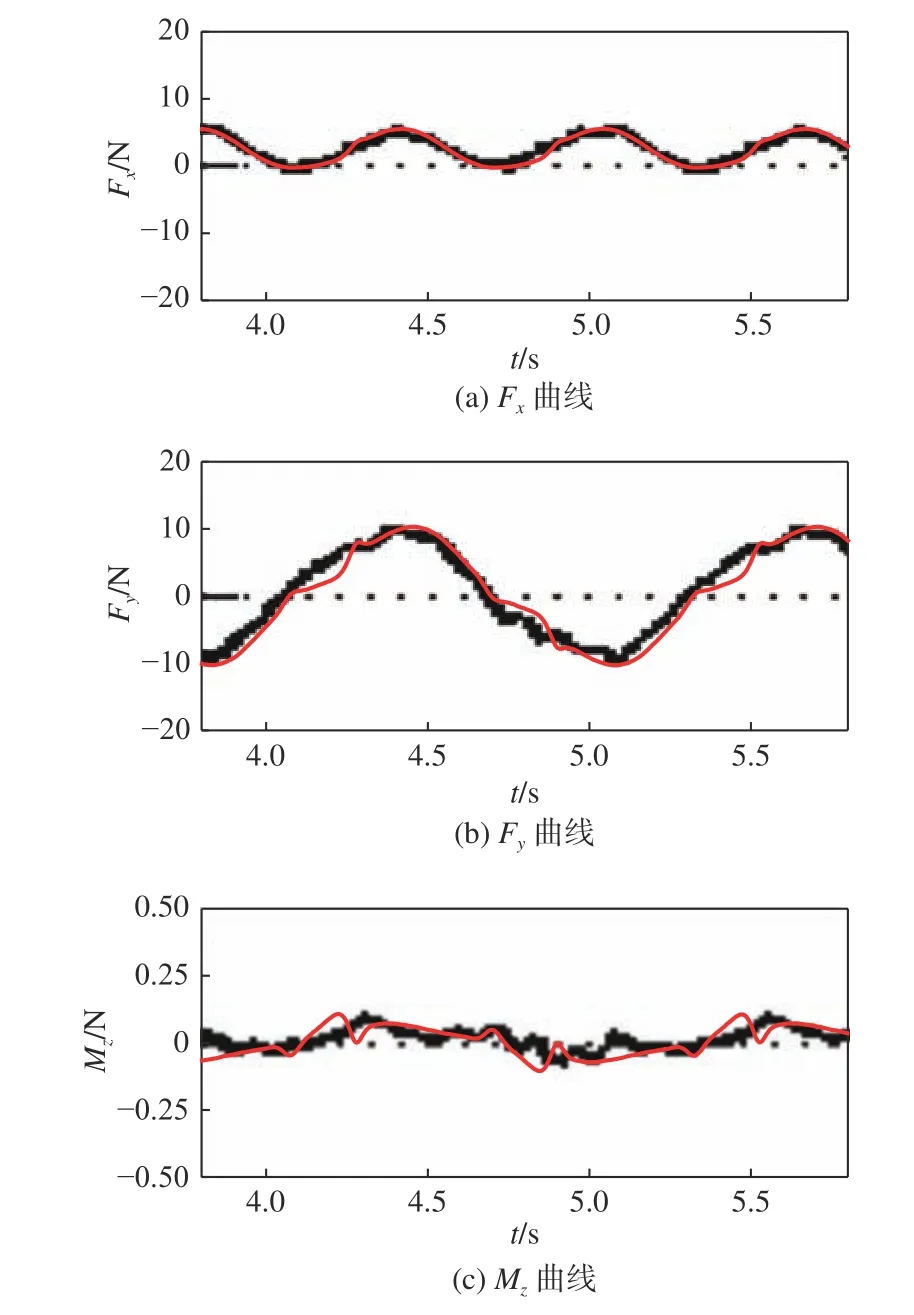
图 7 本文模拟结果与文献[10]实验结果的对比Fig.7 Comparison of results between simulation and experiment in Ref.[10]
2) 网格无关性验证。
为研究网格数对计算结果的影响,使用AR=2的矩形水翼进行验证,分别计算了网格数为36万、71万的算例,结果如图8所示。
由图8可见,两种网格数的效率曲线几乎一致,在0.2%左右浮动,推力系数峰值误差1.3%。两种网格数计算精度差距较小,考虑到计算机性能及计算耗时,本文算例采用36万网格划分方式计算。
3 结果与分析
3.1 不同展弦比的对比分析
1) 推进效率。
图9所示为不同展弦比下矩形翼效率高于0.40的部分工况。

图 8 不同数量网格计算结果Fig.8 Calculated results of different mesh number
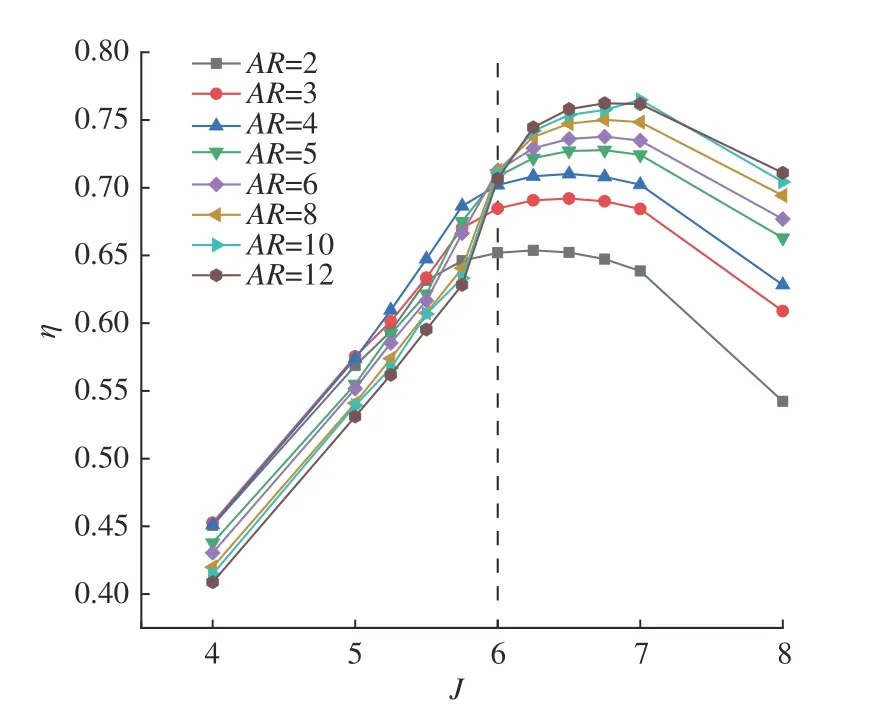
图 9 不同展弦比矩形水翼效率曲线Fig.9 Efficiency curves of rectangular foil with different aspect ratios
由图可见,展弦比对效率产生显著影响,矩形水翼展弦比越大,最高效率越大。在J=6附近,部分较大展弦比的水翼效率基本相同,但效率曲线斜率突然增大,使效率有较快增长。在该点之前的工况下,小展弦比反而有一定的效率优势。该点之后,大展弦比水翼的效率实现反超,呈现出展弦比越大效率越高的趋势,并在某一进速区间内,水翼保持着高效运行的状态。但是,展弦比增大引起的效率增长幅度逐渐变小(图中AR=10,12的效率曲线几乎相同)。同时,展弦比的增加,引起了最高效率点工况的变化(图中展弦比越大,最高效率点的进速系数越大,使效率曲线峰值向右上方移动),因此,水翼存在最优展弦比,过分加大展弦比对效率的提高作用不大。
2) 推力系数。
图10所示为不同展弦比的矩形水翼推力系数曲线。由图可见:不同展弦比矩形翼的推力系数曲线走势相似,均先减小后增大,到达峰值后再减小。在 η>0.40(J>4)或起动阶段(J=0附近),展弦比越大,最大推力系数越大; 各曲线仍存在一个交汇点(J=3.5附近),部分大展弦比水翼在该点的推力系数基本相同,该点之后大展弦比开始显现优势。同时,小展弦比矩形水翼推力系数曲线较为平缓,大展弦比的曲线出现了尖点,峰值位置向右上方移动。展弦比增大引起推力系数的增幅逐渐减小,过分增大展弦比对推力系数增长作用不大。
3) 流场。
参照Dong[11]整理的分辨复杂流场中旋涡的判据,本文选取Lambda 2( λ2)判据方法来显示三维流场中的旋涡。取 λ2=-0.01<0时,显示展弦比AR=3,8的矩形翼在不同工况的尾流场旋涡,如图11所示。

图 10 不同展弦比矩形翼推力系数曲线Fig.10 Thrust coefficient curves of rectangular foil with different aspect ratios
由图11(a)、图11(c)可见,在进速系数较小的工况下,水翼周围产生了大量因摆动产生的小旋涡,与翼尖涡在尾流场中相互融合,发展成清晰的链式涡环结构,这与Wang等[12]在鱼尾鳍尾流场不同展向截面的DPIV实验,以及陈刚等[13]刚性椭圆翼尾流场的显示结果一致; 在进速系数较大的工况下(图11(b)和图11(d)),水翼后方的尾涡层明显变得平直,翼尖涡由于攻角周期性变化,也出现了周期性的消长变化。由于形成一个涡环的时间约为一个周期,水翼后方计算域长度为7 m,所以在进速较高的工况(如图中的6 m/s的工况),仅能显示1~2个涡环。
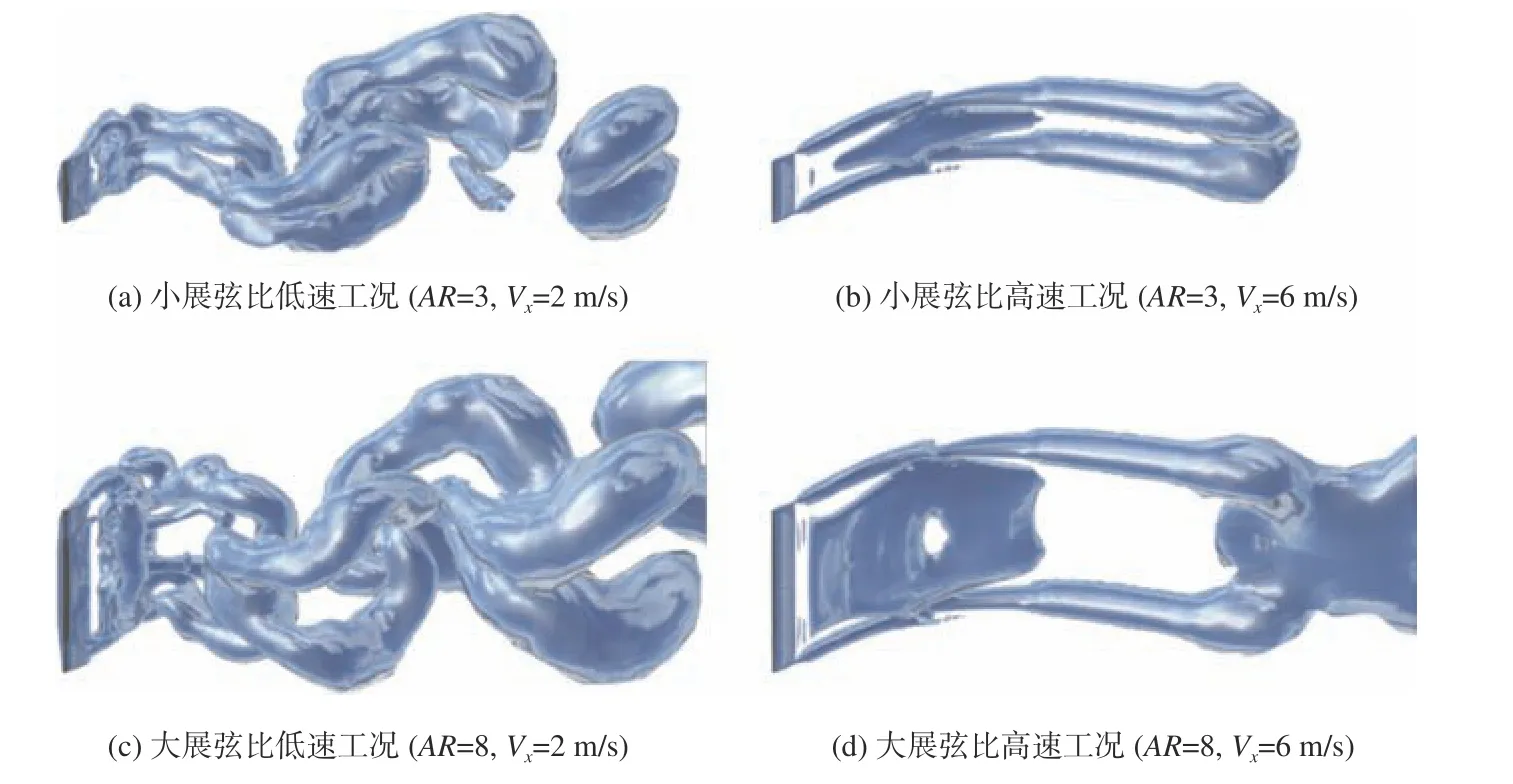
图 11 矩形水翼三维涡环示意图Fig.11 Schematic diagram of three-dimensional vortex ring of rectangle foil
本文效率曲线(图9)及推力系数曲线(图10)均出现了汇交点,而小展弦比水翼的三维效应使得效率曲线和推力系数曲线均趋于光滑,本文算例中展弦比AR=2,3的水翼均出现了三维效应,与Wu等[14]提到的展弦比小于4会出现三维效应的情况完全吻合。对于本文的推力系数曲线(图10),在Re= 7×105附近出现了交汇点。此工况下,水翼在某时段攻角α很大,前缘涡发生流动分离,产生了动力失速。胡健等[15]指出,水翼的非定常运动产生的旋涡是推力产生的主要来源,尾涡的反卡门涡街式的排列,使得水翼产生了推力。水翼最大攻角随进速的增大而减小,推力系数尖点与效率曲线拐点位置相近,在效率曲线拐点位置,推力由非线性升力部分逐步变成线性升力部分,涡系发生变化,仅尾缘涡开始周期性分离,引起推力和阻力均减小,但升力变化不大,表现为效率提高。如果此时继续增大进速,攻角进一步减小,接近最佳升阻比,在最佳升阻比附近的区间保持高效运行。若进速进一步增加,则升阻比下降,效率也会随之下降,直至某一进速后,x轴方向受力平衡,效率为0,从而处于巡航状态。图12所示为本文计算得到的在运动状态下水翼最大攻角随进速系数的变化曲线。

图 12 最大攻角随进速系数的变化示意图Fig.12 Schematic diagram of variation of maximum angle of attack with advance coefficients
图12表明,在本文最大进速系数工况(J=8)时的最大攻角已经接近于0,若再增大进速系数,有效攻角将降为0,甚至变为负攻角,而负攻角工作状态也被称作减速状态或能量收集状态。
3.2 根梢比影响
1) 效率分析。
为研究根梢比对推进性能的影响,采用展弦比AR=4,而根梢比TR不同的水翼。图13所示为不同根梢比的梯形水翼效率大于0.40的曲线。
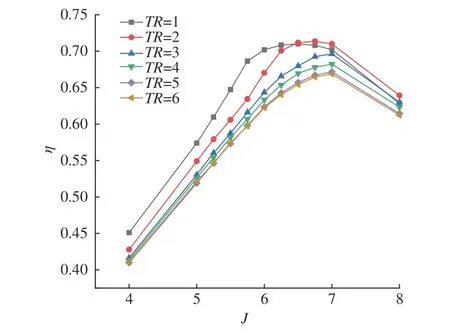
图 13 不同根梢比梯形水翼效率曲线Fig.13 Efficiency curves of trapezoid foil with different tip ratios
由图可见,根梢比TR=2的梯形水翼最高效率略高于矩形水翼(根梢比可认为是1),根梢比增大引起了效率曲线向右偏移,因此,梯形水翼更适合在较高进速系数的工况工作。进一步增大根梢比,效率曲线开始向右下方偏移,偏移量逐步减少,根梢比TR=5,6的水翼形状接近菱形,效率曲线基本相同。
2) 推力系数。
图14所示为不同根梢比的梯形水翼推力系数曲线。由图可见:梯形水翼的推力系数较矩形水翼大幅降低; 曲线走势规律不变,峰值位置略微向右偏移,但增大根梢比使推力系数曲线变得平缓,同时也使得水翼形状接近菱形。因此,推力系数曲线随根梢比的增大而逐渐趋近某一曲线。从推力需求的角度来说,根梢比增大引起了太多的推力损失,相比梯形水翼,矩形水翼能够在相同的展弦比和效率下产生更大推力。当然,可以考虑增大梯形水翼尺寸来使推力达到指定值。

图 14 不同根梢比梯形水翼推力系数曲线Fig.14 Thrust coefficient curves of trapezoid foil with different tip ratios
3) 流场分析。
图15所示为根梢比TR=2,6的梯形水翼在不同工况下的旋涡。
Wu等[14]研究指出流体动力特性受其末端形状的影响很大,倾斜的导边可以产生更复杂的翼尖涡。由结果来看,梯形水翼倾斜的导边使得展向速度加大,从而产生了更为复杂的尾涡层,翼尖涡卷起更加明显; 水翼跨中存在的尖点使流体在其前缘发生了分离,产生的旋涡与翼尖涡与尾缘涡相互作用,涡环结构变得复杂,首缘倾斜角度越大,流场越复杂。图中,根梢比TR=6的梯形水翼低速工况(图15(c))尾流场变得十分混乱,尾涡层卷曲十分严重,翼尖涡的强度变大,尾流场变得肥大。在高速工况下,整个尾涡层强度增大,诱导阻力、能量损耗均增大,引起效率下降。
3.3 前掠、后掠三角水翼对比分析
1) 效率分析。
图16所示为AR=4且不同根梢比的前掠、后掠三角水翼和梯形水翼对比的效率曲线。
由图可见,相比于梯形水翼,存在一定的后掠角度能使效率曲线微幅向上偏移,而前掠角度将使效率曲线大幅向下偏移。同时,翼梢的形状也对偏移量有影响,翼梢弦长较小的水翼对前掠和后掠形式较为敏感,偏移显著。
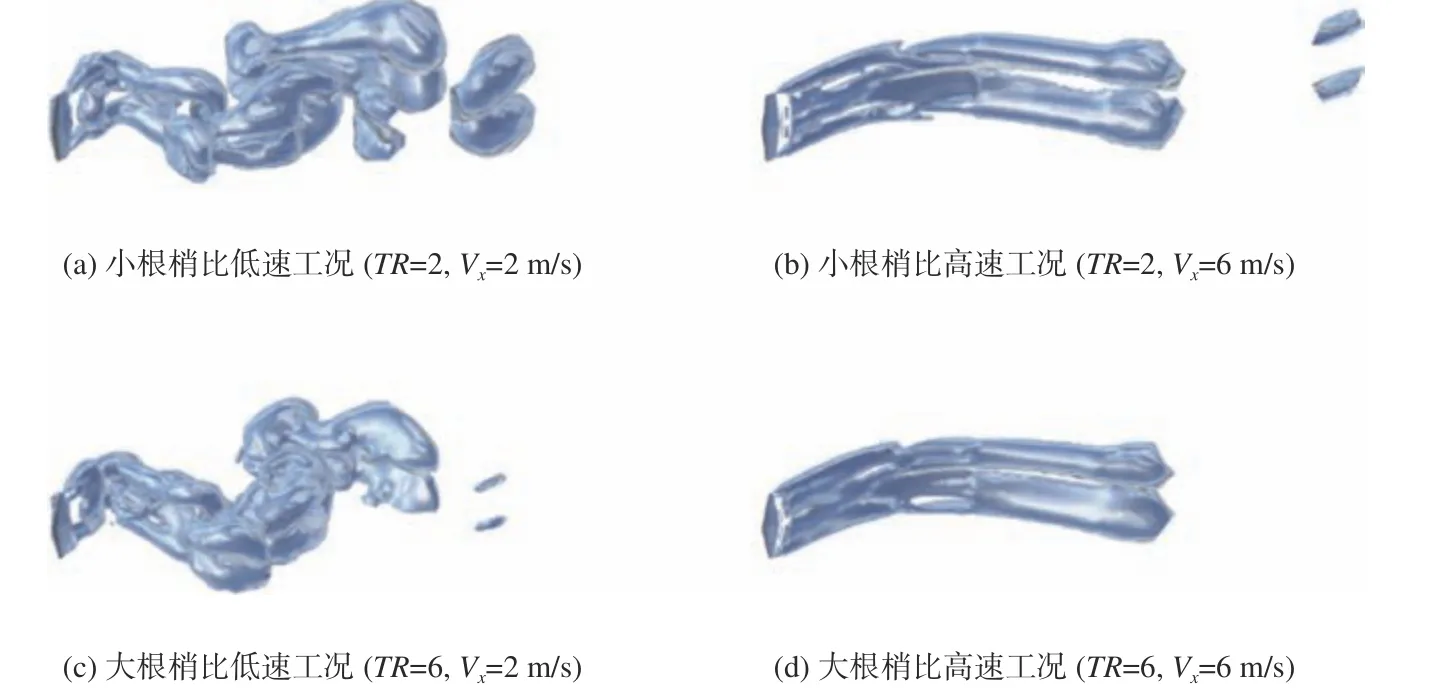
图 15 梯形水翼三维涡环示意图Fig.15 Schematic diagram of three-dimensional vortex ring of trapezoidal foil

图 16 不同扫掠角度梯形水翼与三角翼效率对比曲线Fig.16 Efficiency curves of trapezoid and delta foil with different sweep angles
2) 推力系数。
图17所示为前掠、后掠影响对比的推力系数曲线。由图可见,后掠水翼相比于梯形水翼,不仅可以微幅提高效率,还可提高推力系数,而前掠形式仍不理想,推力系数损失十分明显。然而,TR=2的前掠水翼与大展弦比矩形水翼十分相似,效率曲线出现了拐点,推力系数曲线出现了尖点,说明前掠水翼仍然保持了矩形水翼的特点,只是尾部形状变化,引起了效率和推力的损失。
3) 流场。
图18所示为后掠水翼的尾流场。由图可见,相比于梯形水翼的尾涡结构,后掠水翼在低速工况下变得复杂,其倾斜程度更高的导边,使得首缘分离情况更加严重,翼尖涡形状发生改变,与首缘涡相互缠绕。图中,TR=6的水翼,其翼尖涡螺旋状加剧,并向后发展融合而形成涡环。在高速工况下,尾涡层缠绕情况减轻,尾涡强度比矩形水翼大而比梯形水翼小。
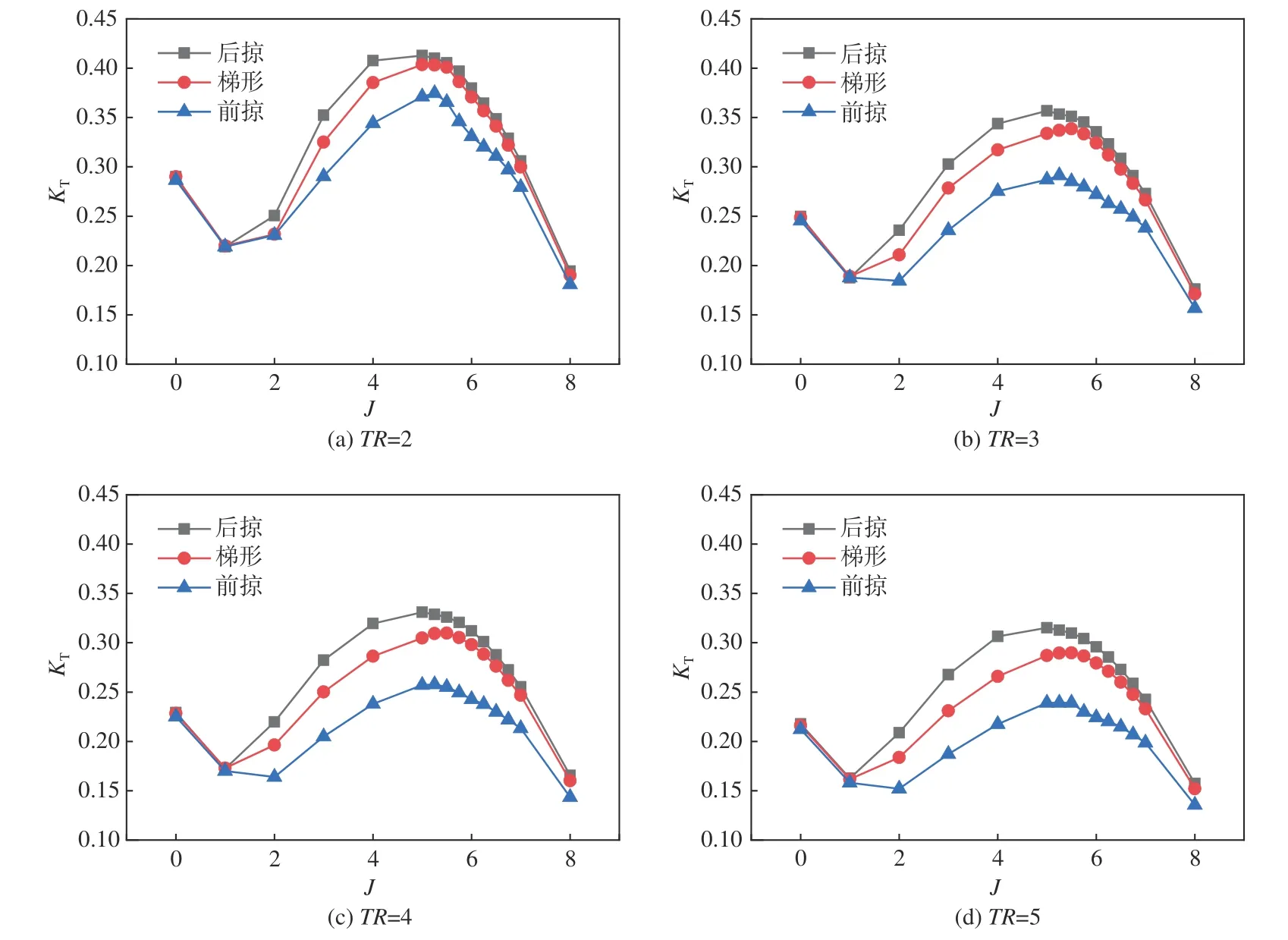
图 17 不同扫掠角度梯形水翼与三角翼推力系数对比曲线Fig.17 Thrust coefficient curves of trapezoid and delta foil with different sweep angles
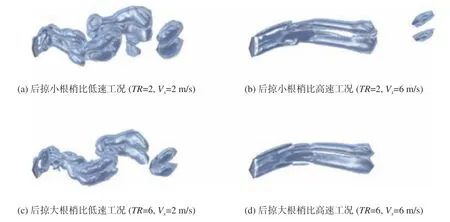
图 18 后掠水翼三维涡环示意图Fig.18 Schematic diagram of three-dimensional vortex ring of back-swept foil
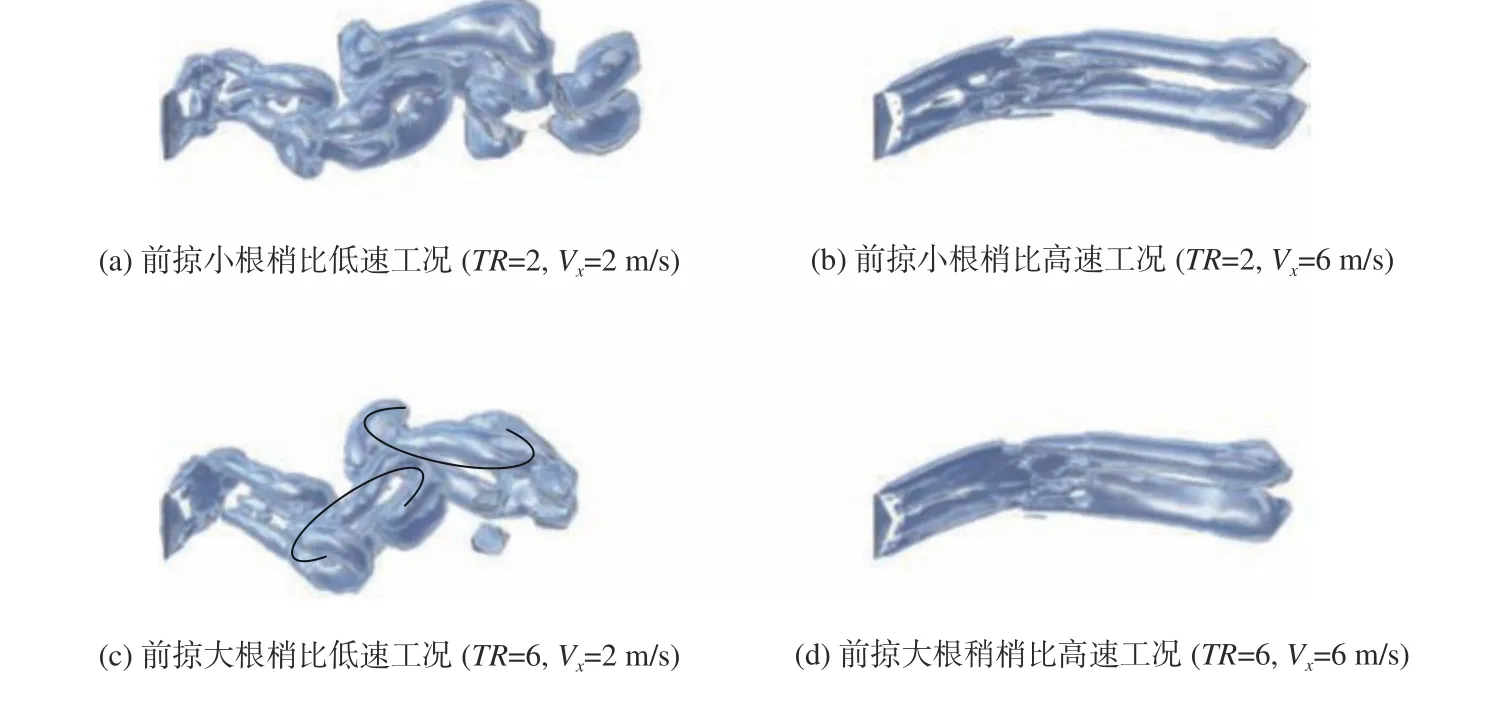
图 19 前掠水翼三维涡环示意图Fig.19 Schematic diagram of three-dimensional vortex ring of forward-swept foil
图19所示为前掠水翼的尾流场。由图可见,在低速工况下,前掠水翼的涡环结构比较清晰,相比于矩形翼,其后缘倾斜且出现了跨中尖点,导致相应涡环发生了更加复杂的折叠,从而加剧了能量耗散,效率降低; 高速工况下,水翼跨中尖点使尾涡层向翼尖卷曲更加明显,尾涡强度明显增加,导致效率降低。综合以上三者来看,后缘形状对推进器性能产生了更加显著的影响,设计水翼形状时需要综合考虑。
综合前掠、后掠三角水翼的效率、推力系数及流场的仿真结果,后缘形状对推进器性能产生了更加显著的影响,设计水翼形状时需要综合考虑。
4 结 论
本文通过数值方法对不同形状的水翼进行了研究,研究发现形状对摆翼推进器的性能有着显著影响。对比结果,得出了不同展弦比、根梢比以及前掠和后掠水翼的效率及推力系数的变化规律,同时还发现,三维效应会改变水翼表面的流动状况,从而改变水动力性能。研究得到以下几个结论:
1) 展弦比会影响水翼的最高效率,且存在摆翼推进器能够一直处于高效运行状态的最佳工作范围,这与文献[16]对二维水翼的研究中指出的水翼在一定St数范围内高效运行是一致的。展弦比AR<4的水翼存在明显的三维效应。可通过增加展弦比来提高水翼效率,当展弦比增加到足够大时,效率将接近饱和状态,展弦比对效率的影响将减弱,再增大展弦比对提高效率的作用不大,因此存在水翼展弦比优化的问题。对正常工作的摆翼推进器而言,展弦比越大,相应的推力系数越大,且推力系数峰值出现在最高效率点之前的工况。
2) 根梢比增大,水翼推力损失较大。但发现根梢比TR=2时,仅推力系数有所下降,并没有影响水翼的最高效率,且最高效率点随根梢比的增大而偏向进速系数较大的工况。若根梢比过大,会对水翼性能产生不良影响,效率及推力系数均会下降。
3) 后掠水翼的效率及推力系数均高于梯形水翼和前掠水翼,倾斜的前缘具有使效率曲线向右偏移的作用,有一定的性能优势。前掠水翼水动力性能较差,水翼后缘形状对性能有明显的影响。倾斜后缘在低速工况下,涡环会发生折叠,加剧能量耗散; 高速工况下,后缘尖点的存在使翼尖涡强度增加,效率和推力均下降。
综上所述,矩形水翼性能最优,后掠三角水翼次之,梯形及前掠三角水翼的尾缘形状导致性能较差。本文算例设置水翼后方计算域长度为7 m,高速工况下的涡环较长,不能完全展示。如果要获取更详细的尾流场结构,需要增大计算域长度,同时进一步精细化网格。此外, 对于摆翼推进器形状的研究也存在较多研究方向,需要在后续工作中深入研究。
猜你喜欢
煤气与热力(2022年4期)2022-05-23
舰船科学技术(2021年12期)2021-03-29
汽车工程(2021年12期)2021-03-08
中学生数理化·八年级数学人教版(2020年4期)2020-10-29
北京汽车(2020年1期)2020-05-07
数学大王·低年级(2019年4期)2019-05-13
中学生数理化·八年级数学人教版(2017年4期)2017-07-08
福建中学数学(2016年4期)2016-10-19
中学生数理化·八年级数学北师大版(2008年9期)2008-10-15
中学生数理化·八年级数学华师大版(2008年4期)2008-09-05
