基于三维激光扫描技术的电网数字化采集方法研究
2021-06-27 03:26陈孝文陈钊渊郑声俊许家伟
电子设计工程 2021年12期
郭 玮,刘 瑛,颜 清,陈孝文,陈钊渊,郑声俊,许家伟
(海南电网有限责任公司,海南海口 570203)
三维激光扫描技术在不用接触物体的情况下能够迅速、大规模、精确地得到目标物体的三维空间数据,从而可以对物体进行迅速建模。因此,该技术在各个领域例如数字城市建设、考古勘察、逆向工程与土木兴建等工程中[1-4]具有广泛的应用。
电网数字化平台作为现实电网在虚拟空间的映射,可以对电网的各生命周期与应用领域进行全方位的可视化管理[5-7]。对电网在规划、建设、生产领域的台账、实时电网潮流等数据进行全方位地存储、管理、分析及可视化展示功能,是实现数字孪生电网工作的重要组成部分。近年来,GIM 概念的提出为电网建立一个全新的输变电工程设计、施工与运行等各阶段的信息模型提供了理论基础,其通过三维立体的设计模型、设计文件与过程管理资料形成适用于电网的统一三维模型标准[8-9]。然而,使用参数化的三维电网模型因其设计的特殊性难以应用于生产域之中。为此,文中采用三维激光扫描技术来获取输电网的三维数据,并通过配合完善的电网杆塔模型库实现电网杆塔三维模型构建,进而完成电网的数字化工作[10-13]。
1 输电线三维激光扫描建模
三维激光扫描技术是通过向被检测的目标物体发射及接收激光脉冲,然后计算出目标物体的相对空间位置,最终通过高精度GPS 定位仪与惯性导航系统来获取目标物体的三维空间数据,并通过图像处理完成目标物体三维模型的建立[14-16]。输电线路的三维激光扫描步骤如图1 所示。首先,采集输电线路三维数据及采集数据时的环境参数;然后,对采集的三维数据进行处理与分类;最终,建立输电线路三维模型。

图1 三维激光扫描步骤
1.1 三维数据获取
航空激光雷达测量多传感器系统可以直接获取电力线路走廊内的大量高精度激光点云数据,数据采集系统主要由激光扫描仪、GPS 接收机、惯性导航仪、气象传感器、高清摄像机及数据存储系统等组成,如图2 所示。激光扫描仪用于对输电网进行扫描,获取输电网的激光点云信息;GPS 接收机用于接收系统返回的定位信息,从而确定激光雷达测量系统的空间位置;惯性导航仪可以获取激光雷达测量系统的空间姿态,同时结合GPS 定位信息能够迅速对激光扫描信息进行定位,确保数据在三维空间上的一致性。

图2 激光雷达测量多传感器系统
为了获取输电网线路的最佳航拍数据,需要保证激光测量系统即无人机飞行平台维持在相对于电力杆塔一定的高度进行激光扫描,可以依据式(1)计算相应的航迹高度。

其中,H为无人机的飞行高度;H塔杆表示电力塔杆的最大高度;H偏移量表示无人机平台相对于电力塔杆的高度偏移量。H偏移量设置需要按照不同等级的输电线路安全距离规范要求选取合适的值,该系统测试采用35~50 m 的距离范围。
为进一步评估后期电网三维重建模型的精度与质量,仍需选择、测量一些电塔模型中的关键点,如图3 所示。其中,矩形方框代表所需测量的模型关键点。对于两个连续电力塔之间的一条电力线、悬挂点与3 个采样点被记录为关键点,这些关键点将被用来评估电网三维重建模型的准确性,如图4 所示。

图3 无人机电力数据采集航飞路线设计示意图

图4 电塔和电力线关键点采样示例
1.2 激光点云数据处理
激光点云数据的处理即是将不体现坐标、姿态等三维空间数据的原始激光信息与原始数码影像数据、GPS 数据等相结合,重构出三维图形的过程。
在获取目标物体的激光点云数据时,由于受到激光扫描设备的精度、测量时现场环境影响与设备操作者的个人因素等原因的影响,得到物体的激光点云数据中将会存在噪声。因此需要对点云数据进行滤波,将点云数据中的噪声点、离群点与孔洞过滤掉,进而更优地执行后续图像处理步骤,包括物体激光数据轮廓特征提取与激光点云数据图像重构等操作[17-19]。
文中采用鲁棒降噪算法来过滤激光点云数据中的噪点。其算法原理是在当前采样点中寻找局部最大点,然后以该点为聚类中心,移动顶点寻找梯度为0 的点,从而得到物体更为真实的表面模型。
定义点云数据为P={Pi,i=1,2,3,…,n},核密度估计函数F,如式(2)所示。

其中,h为核窗口,ϕ为密度核函数。对点Pi设立其领域L(Pi),建立L(Pi)的协方差矩阵,并计算点Pi与L(Pi)的最小二乘曲面,计算L(Pi) 与最小二乘曲面的距离作为最大拟然函数Si,如式(3)所示。

其梯度函数,如式(4)所示。

通过寻找最大拟然函数梯度为0 的点,实现点云数据的聚类处理,最终过滤掉无效点,实现点云数据的滤波处理。图5(a)为原始点云数据;图5(b)为滤波后的点云数据,可见滤波后点云数据更接近物体的真实模型。

图5 点云数据滤波处理对比
1.3 输电网三维模型建立
经过点云数据的获取与滤波后,需要对所获取的电网杆塔外轮廓点云数据进行建模,包括以下步骤:
1)根据激光雷达点云数据查找待构建输电塔模型数据库中对应模型模板,模型模板包括各预设区段模板、所述预设区段模板的连接模式。在预设模型设计坐标系内,根据所述激光雷达点云数据及所述模型模板确定模型设计参数。
2)根据获取的激光点云数据、输电塔结构特征点数据及模型设计参数,在预设模型设计坐标系内分别从预设区段模板中匹配获取各待构建区段。根据连接模式对构建完成的所述待构建区段进行连接,获取输电塔模型。其中,模型设计参数包括在预设模型设计坐标系内的坐标数据。根据激光雷达点云数据及模型模板确定模型设计参数,将激光雷达点云数据输入预设模型设计坐标系中,最终确定激光雷达点云数据对应点云坐标数据。根据各预设区段模板及点云坐标数据,确定各待建区段对应坐标数据。单塔模型的建立过程,如图6 所示。将激光点云数据重构成单塔轮廓,采用激光点云数据的三维坐标计算重构物体的轮廓长度,如式(5)所示。

其中,θ为每个像素领域的灰度权重系数,L(φ)为边缘轮廓长度约束项,P(φ)为稀疏正则项,ELBF是局部灰度信息,ELGF为局部梯度能量项。
因此,图像重构的三维数据场,如式(6)所示。
将φ固定,求出重构的三维图形,如图6(a)所示;然后建立单塔的模型,如图6(b)所示;最终将激光点云数据与模型相匹配,得到最终的三维模型,如图6(c)所示。
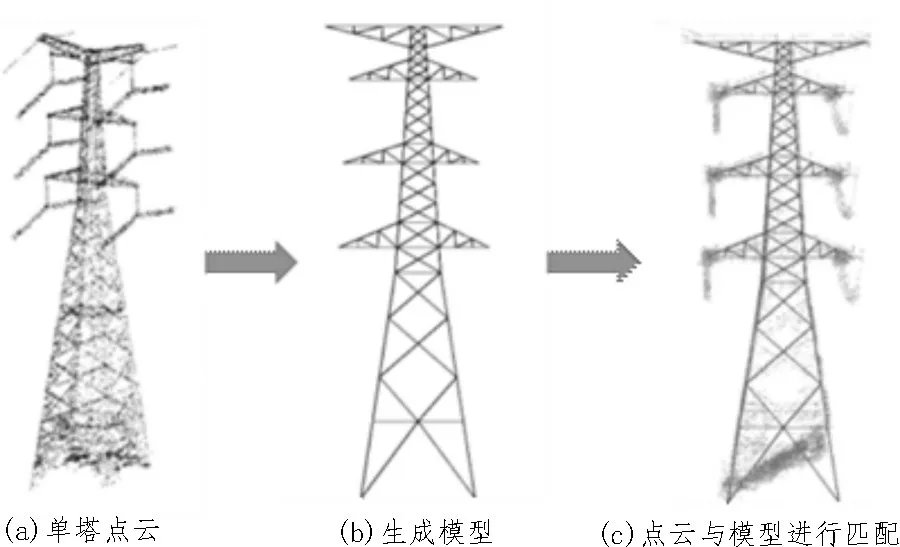
图6 激光点云数据图像重构过程
2 电网数字化管理平台
为对电网进行数字化管理,文中在采用三维激光扫描得到的电网模型基础上,基于B/S 架构构建电网数字化管理平台。该平台主要由数据访问层、业务逻辑层与表示层3 部分组成,业务逻辑层用于完成系统的逻辑功能;表示层负责用户与系统的交互;数据访问层负责逻辑层与表示层之间的数据交互。平台架构如图7 所示。

图7 电网数字化平台架构
为证明系统的稳定性,文中从多方面对该系统进行性能测试。具体数据如表1 所示。从表1 数据可见,在并发用户数为1 200 时,系统的平均响应时间在0.5 s 以内,具有良好的并行数据处理能力,可以满足系统的工程应用需求。

表1 系统性能测试数据
3 结束语
文中将三维激光扫描技术应用于电网数字化平台之中,三维激光扫描可以在不接触物体表面的情况下迅速、全面、精确地获取目标三维表面轮廓信息。因此,可以应用于输电线路杆塔的高精度迅速建模中。基于基地点云的杆塔三维建模可分为以下步骤:1)使用无/有人机进行电力巡线以获取三维激光点云数据,其中包括航线规划与关键点抓取;2)激光点云数据的预处理,包括ICP 迅速匹配、滤波降噪处理与抽取。使用处理过后的激光点云数据与杆塔三维模型库进行匹配,根据特征点的抓取匹配相应的塔型,最终实现输电线路杆塔的迅速三维建模,并根据三维激光扫描技术建模得到的输电网三维模型建立了电网数字化管理平台。
猜你喜欢
北京测绘(2022年5期)2022-11-22
卫星应用(2022年1期)2022-03-09
汽车观察(2021年8期)2021-09-01
中学生数理化·高一版(2020年1期)2020-02-20
电子制作(2019年11期)2019-07-04
中国交通信息化(2019年1期)2019-03-26
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
电子制作(2018年16期)2018-09-26
电测与仪表(2016年23期)2016-04-12
科普童话·百科探秘(2015年4期)2015-05-14