基于STC12C5A60S2 的无刷直流电机调速系统
2021-06-27 03:26陆瑜吉
电子设计工程 2021年12期
王 桢,周 洪,陆瑜吉
(金陵科技学院机电工程学院,江苏南京 211169)
传统直流有刷电机内含碳刷,以机械方式换相,结构复杂且可靠性差,所以人们一直都在寻找更加可靠且具有相似特性的电机作为替代[1-4]。随着晶体管的发展,通过晶体管构成的电子电路进行换相的无刷直流电机应运而生[5]。无刷直流电机具有良好的启动和调速性能,同时兼具易实现、易维护、稳定性强和效率高的特点[6],被广泛应用在家电、汽车电子、工业和航空领域[7-8]。其控制芯片主要有单片机、DSP 以及FPGA 等,单片机以开发成本低、控制性能好、性价比高等优点成为当前应用较多的芯片[9]。相较于国外的技术水平,我国虽然永磁材料丰富,在无刷直流电机上取得了较快的发展,但仍和国外有一定的差距[10-11]。此外,无刷直流电机的驱动电路中必须要有可靠的保护电路,如欠压保护以防止电机损坏[12-13]。
文中介绍了无刷直流电机的基本结构原理和数学模型,然后以STC12C5A60S2 为主控芯片,设计了调速系统的硬件电路,用C 语言编写了系统的调速程序,通过实验验证了该系统的可行性。
1 无刷直流电机的基本结构
无刷直流电机的主体由带有绕组的定子和永磁转子组成。电机工作时,给内部的定子绕组通电产生磁场,与永磁转子互相作用形成电磁转矩,从而使转子转动。无刷直流电机的结构如图1所示。

图1 无刷直流电机结构图
霍尔传感器在无刷直流电机中负责测定当前时刻永磁转子的磁极位置,为电机的换相提供正确信号。当无刷直流电机的永磁转子经过相应的霍尔传感器时,霍尔传感器会输出一个信号,该信号被送到控制芯片,控制芯片处理后发出控制信号使得相应的定子绕组通电,绕组产生磁场使得转子可以继续转动下去,以此往复循环。
2 无刷直流电机的数学模型
为了简化模型,作出如下假设:
1)定子绕组的电阻和互感均相等;
2)忽略电枢反应和铁芯饱和;
3)各定子绕组空间对称;
4)全桥电路的开关管和续流二极管均为理想器件。
无刷直流电机的等效电路如图2 所示。
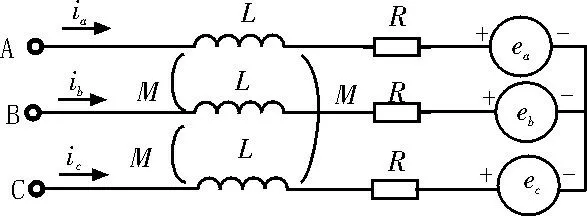
图2 无刷直流电机等效电路
根据图2可以得出各个定子绕组的端电压方程:

式中,ua、ub、uc为三相定子绕组的端电压,ia、ib、ic为各定子绕组的电流,ea、eb、ec为各定子绕组的反电势,R为各定子绕组的电阻,L为每相绕组的自感,M为绕组之间的互感。
电磁转矩可表示为:

式中,ωm是电机的机械角速度。
电机运动方程为:

式中,TL为负载转矩,J为电机转子转动惯量,B为阻尼系数。
3 调速系统硬件电路设计
在该调速系统中,硬件电路包括降压整流电路、电压采集电路、电流采集电路和全桥逆变电路等电路。硬件电路系统框图如图3 所示。
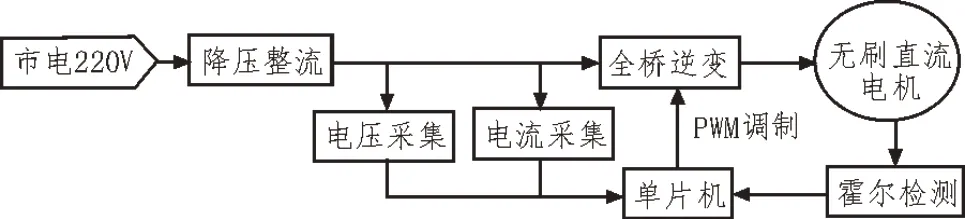
图3 硬件电路系统框图
其中,降压整流电路采用24 V 直流可调稳压电源代替。由于单片机单个引脚可以承受的电流不能超过20 mA,故需要对电流采集电路做特殊处理,如图4 所示。主回路的电流流过采样电阻产生微弱的压降信号,经过运放放大后输入单片机的P1.0 引脚。电压采集电路同理,单片机的单个引脚输入不可超过5 V,故设计一个电阻分压电路以采集母线电压,并输入P1.1 引脚。

图4 电源输入以及采样电路
STC12C5A60S2 的最小系统电路如图5 所示。

图5 单片机最小系统电路
按键电路包括3 个按键,如图6 所示,其主要功能是实现无刷直流电机的启停,正转加速/反转减速和正转减速/反转加速。3 个按键分别接至STC12 C5A60S2 的P2.1、P2.2 和P2.3。当没有按键按下时,3 个引脚都是高电平状态,当有按键按下时,该按键所连的引脚被拉至低电平,单片机检测到低电平信号后便执行相应的策略。

图6 按键电路
LCD1602 液晶显示电路和无刷直流电机的霍尔传感器接线电路如图7 所示。LCD1602 负责显示一些比较重要的参数,比如直流母线电压、电流、电机工作状态和转速。霍尔传感器电路负责将信号传至P3.5、P3.6 和P3.7 引脚,以此让单片机判断电机转子的位置。

图7 LCD1602及霍尔传感器电路
驱动电路由一个四路与门芯片和3 个半桥驱动芯片组成,如图8 所示。P1.3 是STC12C5A60S2 的PWM 输出引脚,通过3 个与门拓展成三路PWM 信号,同时由另外3 个引脚P3.2、P3.3 和P3.4 控制三路PWM 信号的有无。在此基础上,与门输出的PWM信号输入给各个半桥驱动芯片的2 号引脚,再由P1.5、P1.6 和P1.7 输入给各个半桥驱动芯片的3 号引脚,对芯片进行使能控制,即控制驱动芯片有无输出。在驱动芯片3 号引脚允许使能时,7 号引脚的输出和2 号同相,5 号引脚的输出和2 号反相,这也避免了同一桥臂上、下管同时导通造成短路。由此便可通过单片机控制三相全桥电路6 个开关管的通断。

图8 驱动电路
三相全桥逆变电路使用6 个MOSFET 场效应管实现,由VT1 和VT4、VT3 和VT6、VT5 和VT2 构成三相的3 个桥臂,每个桥臂使用单独的半桥驱动芯片驱动,无刷直流电机的3 个定子绕组分别接至各个桥臂上开关管的源极和下开关管的漏极之间,如图9 所示。用来控制的PWM 调制可以在维持直流母线电压恒定的情况下,通过控制开关管的通断来改变施加到定子绕组端电压脉冲的宽度,从而实现无刷直流电机的调速。文中的调速系统以两两导通的方式工作,选用H_PWM-L_ON型调制方式,即对上桥臂开关管进行PWM 调制,而下桥臂开关管恒通的工作方式。

图9 三相全桥逆变电路
4 调速系统程序设计
调速系统的程序中,检测无刷直流电机的霍尔传感器信号并作出相应的换相策略是该程序设计的重点。该调速系统使用的无刷直流电机57BL 55S06-230TF9 参数如表1所示。
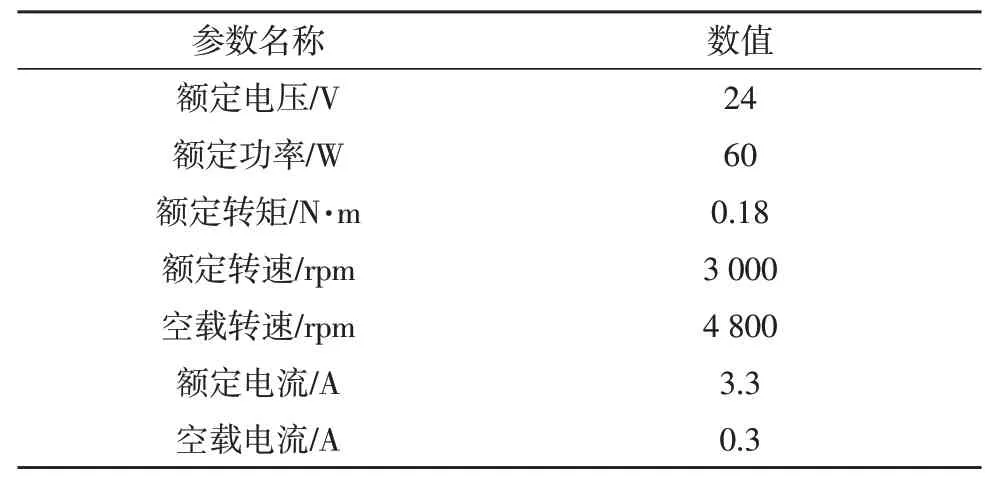
表1 无刷直流电机参数
无刷直流电机在两两导通的工作制下一个周期内有6 种磁场状态,这6 种状态连续循环就能使电机朝指定的方向一直转动[14-16]。在这6 种状态的变化中,需要获取电机霍尔传感器的信号,以此为依据进行判断,决定使上、下桥臂哪两个开关管导通。
该无刷直流电机的空载转速为4 800 rpm,即80 rps。因此,单片机每秒内检测霍尔传感器信号的次数必须远大于80 次才可以保证电机的持续运行。在该系统中设置单片机每100 μs 发生中断检测一次,即每秒共检测一万次。
在程序主函数中进行各项初始化后进入循环,循环中包括电流、电压采集程序、微机保护诊断程序、按键检测程序、液晶显示程序。同时另设中断程序检测无刷直流电机的霍尔信号,系统程序框图如图10所示。

图10 系统程序框图
5 实机调速测试
无刷直流电机实机测试如图11 所示。

图11 实机测试
然后,使用便携式双通道示波器对调速系统相关信号进行测量,图12 为无刷直流电机单个定子绕组端电压和转子所对应的霍尔信号波形,可以看出STC12C5A60S2 在检测到霍尔信号后对驱动电路所做控制的精确性。

图12 定子绕组端电压与霍尔信号波形
调节无刷直流电机的转速,分别测量低速、中速和高速下单片机PWM 输出引脚的波形,如图13 所示。转速越高,PWM 波形的占空比也就越高。由此可见该调速系统的有效性。

图13 不同转速下的PWM调制波形
图14 为同一桥臂上、下两个开关管G 极的驱动电压波形,可以看出,不会出现单桥臂上、下管同时导通的情况,证明了采用该单片机进行PWM 调制的可靠性。

图14 同一桥臂上、下开关管驱动电压波形
6 实机保护测试
首先,测试该无刷直流电机调速系统的过载保护,电机过载运行时,定子电流急剧增大。保护阈值设置为1.5 A。待电机转速平稳后,使其过载运行,观察到电机转速急剧下降,液晶显示上主回路的电流值增至1.59 A,保护启动,全桥输出关闭,电机停止运行,过载保护如图15 所示。

图15 过载保护
然后,测试电机的欠压保护。一方面电机在低压状态下运行定子电流会增大,导致线圈升温。另一方面无刷直流电机在电动车领域应用广泛,电池在低电压状态下过度放电会严重缩减寿命,所以欠压保护是很有意义的。该无刷直流电机额定电压为24 V,设定欠压保护的阈值为21 V。慢慢调节可调直流电源的输出直至其低于21 V,观察到保护启动,电机停止运行,欠压保护如图16 所示。

图16 欠压保护
最后,测试电机的堵转保护,当电机发生堵转后,定子电流也会急剧增大,一般情况下过载保护可以起到同样的保护效果。但如果电机工作在低转速状态,此时发生堵转,定子电流也未必会超过过载保护的阈值,导致无法触发保护,因此另外设置堵转保护。让无刷直流电机工作在最低速,令其堵转,观察到液晶显示上的电流增大至0.44 A,经过一定的延时检测后保护启动,电机停止运行,堵转保护如图17所示。
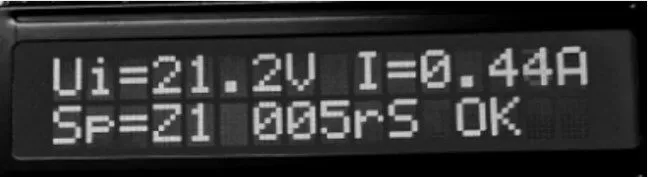
图17 堵转保护
7 结束语
文中通过采用STC12C5A60S2 作为主控芯片,设计了一套无刷直流电机的调速系统,采用PWM 调制,并为其设计了微机保护的功能。实验结果表明,该系统在实现正反转的基础上,可以通过改变PWM波的占空比实现无刷直流电机的调速。应对不同的故障情况,可以快速地检测出过载保护、欠压保护和堵转保护并作出响应,证明了该调速系统的有效性和可靠性。
猜你喜欢
大电机技术(2022年5期)2022-11-17
童话王国·文学大师班(2017年6期)2017-07-10
电子制作(2017年1期)2017-05-17
微特电机(2017年10期)2017-05-15
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
太空探索(2015年6期)2015-07-12
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01