
基于S波段双偏振雷达资料的降水粒子类型识别算法及应用
2021-06-28 06:53宋文婷李昀英黄浩朱科锋
大气科学学报 2021年2期
宋文婷 李昀英 黄浩 朱科锋

摘要 基于质量控制的S波段双偏振雷达格点化观测数据,利用模糊逻辑算法,结合降雨粒子散射和空间取向等特征建立了降水粒子类型识别算法,用于分析降水过程中降水粒子的空间分布情况及粒子类型的演变过程。该算法可以将降水粒子分为液态、冰态、混合态等不同种类,有助于发现影响降水多寡的云微物理关键结构。首先根据不同降水粒子的雷达回波特性得到隶属函数,其次根据不同雷达观测变量在判别粒子类型时的贡献不同,确定每个观测值对应的隶属函数值的权重,对各个函数值进行加权平均后,得到不同粒子类型对应的逻辑值。最后进行集成和退模糊化处理,选出每个格点中逻辑值的最大值,认为该值所代表的粒子类型即为该格点所代表的粒子类型。在确定观测值对应的隶属函数值的权重时,水平反射率因子和环境温度作为计算粒子类型的直接影响因子,不再进行加权平均计算,提出了基于S波段双偏振雷达参量和环境温度的降水粒子类型识别算法。通过华南前汛期一次降水过程,利用雷达观测降水资料,验证了该算法的合理性。验证结果表明,反演所得的“雨”类型的分布特征与实际观测降水的分布特征基本一致,证明该算法可以反映降水区域的粒子类型,识别结果基本合理。进一步研究发现在降水发生之前,空中存在大量“毛毛雨”类型的粒子,在降水发生时毛毛雨和雨粒子的变化呈负相关性,表明此次降水主要由毛毛雨碰并产生雨粒子并降落地面产生。
关键词 降水粒子类型;模糊逻辑算法;双偏振雷达
研究降水过程中可能存在哪些粒子类型,能够帮助我们认识水凝物粒子的分布以及不同粒子间的转化过程(Gao et al.,2016;Hubbert,et al.,2018;杨文霞等,2018;王易等,2019)。得到粒子类型的信息需要借助双偏振测雨雷达资料,这是因为双偏振雷达具有水平、垂直两个方向的偏振信号,可以产生包括水平偏振反射率因子ZH、垂直偏振反射率因子ZV、差分反射率ZDR、差分传播相移率KDP、水平极化和垂直极化零滞后相关系数ρHV等参数,而降水粒子的大小、形状、方位、相位和体积密度对双偏振雷达的观测都有不同程度的影响,因此双偏振雷达能够通过观测参数的变化识别采样体积中的主要降水粒子类型(Hall et al.,1984),其中S波段双偏振雷达的波长在10 cm左右,在强降水中衰减较小,被广泛用于降水过程监测(Kumjian and Ryzhkov 2008;Chandrasekar et al.,2013;赵果等,2016;闵锦忠等,2018;何丽华等,2020)。在反演粒子类型时,由于不同降水粒子类型之间的双偏振量取值范围有所重叠,因此不存在一个清晰的界限来区分各种粒子类型之间偏振量的具体数值。在这个制约下,采用模糊逻辑方法对水凝物粒子进行分类就具有很大优势(Vivekanandan et al.,1999;Park et al.,2009;Dolan et al.,2013),因为模糊逻辑方法为每一个可观测的取样单元分配了隶属函数,可以用简单的规则而非公式来描述复杂的观测对象(张培昌等,2010),国内外大量的研究也证明了模糊逻辑方法在识别水凝物粒子方面的重要性和可行性,同时也有大量的文献描述对算法的改进。Straka and Zrnic (1993)提出采用模糊逻辑算法识别降水粒子相态的方法后,Liu and Chandrasekar (2000) 使用二维隶属函数建立了基于S波段双偏振雷达探测参量的降水粒子分类模糊逻辑算法。曹俊武等(2005)也使用该方法对美国KOUN S波段双偏振雷达 PPI (Plane Position Indicator) 扫描数据进行降水粒子分类识别,得到较为合理的识别结果,但该研究未考虑环境温度对判别结果的影响。Park et al.(2009)基于模糊逻辑算法对中尺度对流系统中水成物粒子的水平结构进行识别并且分析了其合理性,更新的算法考虑了测量误差,波束展宽效应,融化层位置和降水类型(对流降水与层状降水)。另一个典型的算法是由 NSSL (National Severe Storms Laboratory) 开发的HCA(Hydrometeors Classification Algorithm) (Schuur et al.,2003),HCA 简化为仅使用三個偏振参量(ZH,ZDR,ρHV)对降水粒子进行分类,但该算法忽略了KDP对反演液态降水粒子的贡献(Cao et al.,2012)。国内对于模糊逻辑算法的改进也有很多研究,程周杰等(2009)利用英国 CAMRa S 波段双偏振雷达 RHI (Range Height Indicator) 探测数据建立了云粒子相态反演的模糊逻辑算法,并结合温度廓线数据,建立了一种以Beta函数为隶属函数的模糊逻辑算法,对11类降水粒子进行了分类研究。郭凤霞等(2014)在此基础上加入环境温度参数对雷暴云成熟时期水凝物粒子的垂直结构进行了识别。王德旺等(2015)也采用不对称T型函数来反演云中粒子并指出模糊逻辑算法反演出的粒子相态结果与探空实测数据具有较好的一致性。
针对模糊逻辑方法在判别粒子类型时存在的局限性,近年来有研究尝试利用不同方法来提高识别结果的可靠度,但是观测要素所占权重的设置依然存在不合理性,而识别结果与等权重系数的结果存在一定差异,也反映了各偏振参数的权重系数对识别结果的影响(曹俊武等,2005)。因此,如何选择合理的权重系数比,使反演结果更加合理,是一个需要探索的问题。本文提出了一种方法,主要在模糊逻辑算法基础上,对不同观测要素所占权重的计算进行了优化,在已有基础上对识别算法进行改进,并通过华南前汛期一次降水过程,基于融合降水观测资料,验证该算法的合理性。
1 降水粒子识别算法介绍
1.1 不同偏振量在识别算法中的作用
双偏振雷达资料之所以能够识别粒子类型,主要是因为不同物理量在不同偏振方向上存在差异或相关性,因此双偏振雷达除了具有水平、垂直反射率因子(ZH、Zv)之外,还具有雷达差分反射率因子(ZDR)、差分传播相移率(KDP)、零滞后相关系数(ρHV)等雷达偏振参数。
1.1.1 水平反射率因子ZH和垂直反射率因子ZV
根据定义,单位体积中降水粒子(雨、雪、霰粒子、雹等)直径的6次方的总和称为反射率因子(俞小鼎等,2007),为方便起见,通常用对数形式表示反射率因子的大小。
其中:ΦDP表示水平及垂直偏振波在通过相同长度的降水区后,散射回天线处的相位差值;KDP表示距离库上单位距离上ΦDP的变化率,表示粒子对偏振波传播速度或相位的影响。对于S波段雷达,KDP一般小于4(°)/km,KDP的取值主要受液态降水的影响。一般而言,KDP的取值越大,说明此处的降雨强度越大,含有冰核的大雨滴KDP可达2.5~5.0(°)/km,固态降水产生的KDP很小,在混合相态的降水粒子中,KDP主要是由液态降水产生的。
1.1.4 零滞后相关系数ρHV
相关系数ρHV是指一个脉冲周期前后接收到的回波,其水平偏振分量和垂直偏振分量的相关程度,取值在0到1范围内,当水平和垂直偏振波同时发射与接收时,称为零滞后相关系数。ρHV值越接近1,说明此区域粒子的形状和大小一致性越高。液态降水的ρHV值除了在冰水混合区以外,一般在0.98以上,当有锥球状大冰雹、小冰雹与雨滴共存时,水平和垂直偏振信号的相关性较差,ρHV甚至会降低至0.9以下。
1.2 识别算法的实现
模糊逻辑法主要包括四个过程:模糊化、规则推断、集成和退模糊(Liu and Chandrasekar,2000)。关于使用模糊逻辑识别降水粒子类型方法的改进基本都在这个框架之下进行,本文提出的方法也在此基础上对算法中规则推断部分做了优化。
1.2.1 模糊化和隶属函数
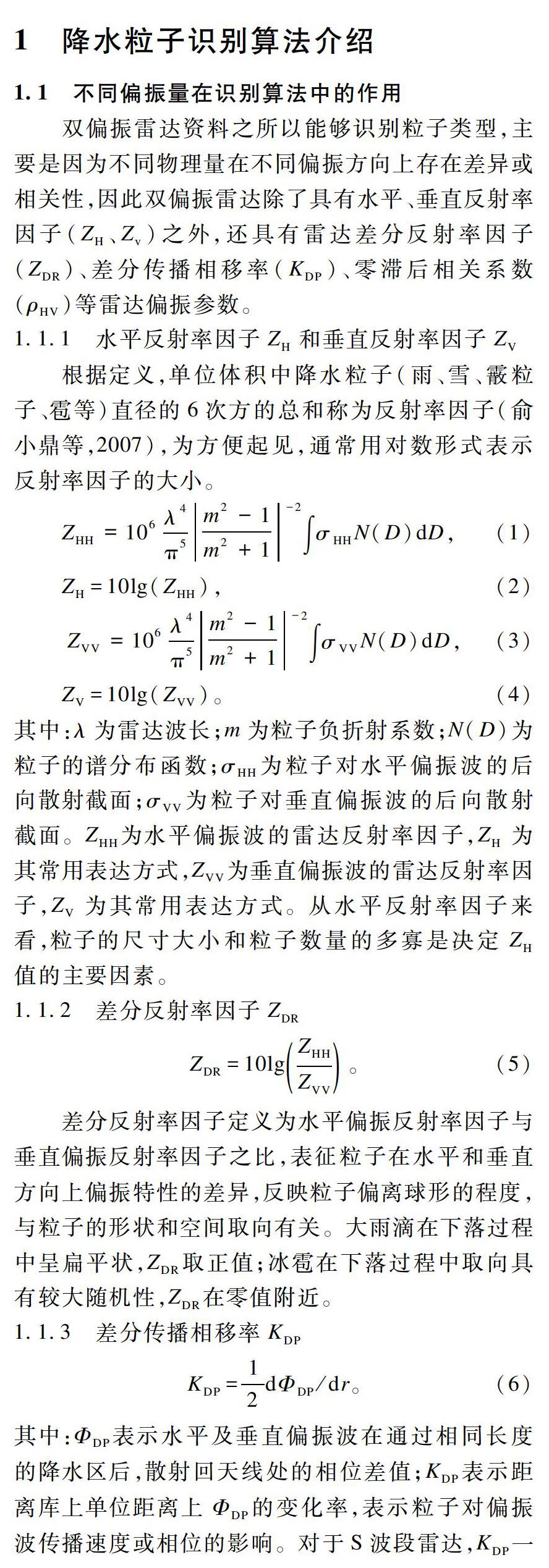
模糊化是将观测参数(雷达偏振量和环境温度T)的数值转化成能够判断是否为某一种粒子的可能性的过程,这种可能性称之为模糊基。得到模糊基的方法是建立隶属函数,其中观测参数作为自变量,模糊基作为因变量。如果将可分辨的粒子类型分为10种,观测量分为5个,那么每一种观测量都能对应10种模糊基,每一种粒子类型对应5种模糊基。
其中:β取值在0到1之间;a为半宽值,当x=m±a时,β=0.5;b表示斜率,b值越大函数越陡峭;m表示函数曲线的中心位置;x表示输入的观测量。该函数的形状由这三个参数决定,不同的隶属函数对应不同的参数值,本文参数值以及识别粒子类型的确定参考Brenda Dolan等人建立的S波段偏振雷达检索数据库资料(表1)。
表1中的聚集体是一种冰和空气的混合态(Dolan et al.,2013),主要由较小冰晶随机粘在一起形成的,体积密度比冰晶低很多。垂直向冰晶可以用来判断是否存在强电场。大滴指含有大量水、倾斜角较小的大而扁平的颗粒(5~8 mm),大滴的形成主要来自体积较大的冰晶颗粒(霰或冰雹)的完全融化。
1.2.2 规则推断
在对降水粒子类型进行判断时,各个观测量起到协同作用,但不同的观测量所起到的作用是不同的,也就是说由不同观测量产生的隶属函数值在判断粒子类型时,所占权重是不同的,而降水粒子类型的识别问题主要集中在模糊逻辑算法的规则构建上,因此,如何合理的设定推断规则是一个需要解决的问题。
将不同观测量协同作用下产生的判别粒子类型的结果称为判别强度,对规则的推断就是寻找一种合理的方法来确定这个判别强度值。国内已有研究在这个环节的处理方法是取预先设定的数值作为各观测量所对应的函数值的权重系数,然后对加权后的结果进行相加,而本文利用加权平均值的概念对判别强度进行重新计算,突出了水平雷达反射率因子ZH和环境温度T对判别强度结果的影响。计算公式如下:
文在确定ZDR、KDP、ρHV的权重之后,对ZH和T的权重做了放大处理,将二者的函数值作为判别强度值的直接影响因子进行计算。
1.2.3 集成与退模糊
根据上一步的规则推断,使每一个粒子类型都有一个判别强度值,如何确定哪种粒子类型是该观测单元观测到的类型,就涉及到集成与退模糊过程。在集成部分采用最大集成法作为判別标准,将每个观测单元中的最大判别强度值选出来。在退模糊部分主要是确定集成过程得到的最大判别强度值所对应的是哪类粒子类型,最大判别强度值对应的粒子类型即为模糊逻辑算法最终确定的粒子类型,至此集成和退模糊过程完成,识别算法得以实现。
2 算法的应用
2.1 降水粒子类型的合理性检验
通过一次华南前汛期降水过程,验证方法的合理性。使用的雷达资料为华南地区11部S波段业务双偏振雷达的拼图数据。拼图使用了等经纬度投影,范围为108°~118°E、20°~26°N,垂直范围1~20 km,水平分辨率为0.01°×0.01°,垂直分辨率为1 km,时间分辨率为6 min。拼图前,首先利用 Huang et al.(2018)和黄浩(2018)所述方法对每部雷达进行数据质量控制,包括ZDR系统偏差和ΦDP系统偏差去除、衰减订正、最小二乘拟合估计KDP、ρHV弱信噪比下的偏差订正以及非气象回波识别和去除等。在对一个时刻进行拼图时,选取该时刻附近3 min内的所有雷达数据,利用Reorder软件(Lee et al.,1994),将ZH、ZDR、KDP和ρHV插值到前述网格上。对于一个格点的任意参数(ZH、ZDR、KDP和ρHV),如果有一部雷达在该格点上存在有效插值,则取这个值为拼图值;如果有多部雷达在该格点上存在有效插值,则取这些值的中值为拼图值。温度资料来自广东省清远市探空数据(站点编号:59280,113.05 °E、23.66 °N)。降水数据来自国家气象信息中心发布的0.1°×0.1°逐小时的降水量资料,该资料由国家级气象台站观测的日降水量和美国气候预测中心研发CMORPH(CPC MORPHing technique)卫星反演的降水产品融合得到(沈艳等,2013)。
2019年4月11日,受短波槽和低空急流影响(图2a),华南地区出现强锋带,雨带由西北向东南移动。取110.1°~115.6°E、22.2°~23.5 °N为研究区域(图2b),并在图2b黑线所在位置做剖面。根据小时累计降水资料可知,在14时(世界时,下同)降水量达到峰值(图2c),此时剖面所在位置小时雨量在114.2°E 、22.5°N处最大(图2d)。
为方便分析14时粒子类型的垂直分布与雨量的对应情况,图3给出了14时图2b黑线所在位置剖面处各观测量的垂直分布情况。在图3a的回波图上可以明显看到一个强回波中心,高度从地面延伸至6 km处,在它的西侧(图3a中最强ZH中心左侧)还有一个相对强度较弱的中心,高度在4 km以下。在图3b、c、d相应的最强ZH的中心位置,0 ℃层以下ZDR>1 dB,KDP>1(°)/km,同时对应的ρHV 值也在0.95以上,说明在0 ℃层以下该强回波中心其特征符合大雨滴出现的现象。在0 ℃层以上,ZH>45 dBZ,但ZDR 较小,在0~1 dB之间,0 由于现有的地面观测无法探测到云内未落地的粒子类型,因此选取可以观测到的地面雨和毛毛雨粒子类型,结合小时累积降水资料对识别结果进行验证。图5分别是研究区域(110.1°~115.6°E,22.2°~23.5°N)内雨粒子类型(图5a)和毛毛雨粒子类型(图5b)出现频率随时间-高度的变化情况,出现频率指的是同一高度同一时刻识别为雨/毛毛雨粒子的格点占区域格点总数的百分比。值得注意的是,融合降水是上一时刻到此刻的小时累积量,而出现频率则是每10 min一次的瞬时量,因此在判断二者在某一时刻是否有较好的对应关系时,应该考虑粒子出现频率的小时累计意义,即分析前一小时至当下一小时所有瞬时时刻的粒子出现频率,本文即是如此计算的。根据地面小时累计降水数据可知,07时地面观测开始有明显降水产生(图2a),10时小时降水量出现小的峰值,在14时小时累计降水量达到最大值。粒子类型的识别结果很好地对应了小时雨量的变化趋势,在雨粒子识别结果中(图5a),07时开始出现雨粒子,10时雨粒子在低层出现频率高值中心,在13—15时雨粒子出现最强大值中心,这与融合降水14时出现累计降水(即13—14时降水总量)最大值的事实不完全相符,但毛毛雨粒子类型的出現频率在14—15时有所减少,因此二者出现的共同频率使累积雨量在14时达到最大,这同时也解释了为什么雨粒子出现频率在10时出现大值中心后11—12时有所减小,但10—14时的小时雨量却在持续增大,因为在11—12时的降雨过程中,毛毛雨粒子出现频率有所增加,弥补了雨粒子的减少,使累计雨量仍呈持续增大趋势。以上在可观测数据的基础上,证明了改进后的模糊逻辑算法对降水粒子类型的识别结果是合理的。 2.2 不同降水粒子类型的转化 在证明了算法合理性的前提下,对不同降水粒子的转化情况进行初步分析。 图6a显示在1 km高度上毛毛雨和雨的出现频率的散点关系,散点图说明二者存在明显的负相关关系, 考虑算法中识别毛毛雨和雨的参数选择范围有所重合,且显著的负相关关系只出现在毛毛雨出现频率小于0.7时,表明毛毛雨和雨的负相关性并不完全是由算法的数学关系造成的。图6b是毛毛雨和雨在1 km高度处出现频率随时间变化情况,在06时之前毛毛雨出现频率约0.8,雨出现频率不明显,少量的雨量主要由毛毛雨贡献,在06—14时随着雨粒子出现频率的增大,毛毛雨粒子逐渐减少,且二者呈显著的负相关关系,说明雨量的增加主要是由低层毛毛雨碰并产生雨粒子并降落地面造成的。在高空冰相粒子间也有比较明显的相关关系。图6c显示在12 km高度上聚集体和高密度霰的相关关系,散点分布情况说明在12 km处二者存在一定的负相关关系。从上文的分析可知在14时12 km高度处存在高密度霰(图4),根据聚集体和高密度霰的出现频率随时间的变化情况(图6d),可知聚集体为高密度霰的形成做出了主要贡献,说明霰的形成主要由小体积的冰晶碰并过冷水产生。 3 结论与讨论 本文针对质量控制的S波段双偏振雷达格点化观测数据,基于模糊逻辑算法建立了降水粒子类型识别算法。根据水平雷达反射率因子ZH和环境温度T的重要性,对算法中二者权重的计算方法进行了优化,对ZH和T的权重做了放大处理,将二者的函数值作为判别强度值的直接影响因子,突出了水平雷达反射率因子ZH和环境温度T对判别强度结果的影响。通过华南前汛期一次强降水过程,利用台站观测降水资料,验证了该算法的合理性。结论如下: 1)反演所得的雨和毛毛雨类型的时间变化特征与融合小时累积降水的时间变化特征基本一致,证明该算法可以合理地识别降水区域的粒子类型,识别结果合理。 2)低层毛毛雨和雨粒子类型的负相关关系显著,说明雨量的增加主要由低层毛毛雨碰并产生雨粒子并降落地面产生。高空聚集体和高密度霰也存在一定的负相关关系,根据二者随时间的变化可知,聚集体为高密度霰的形成做出了主要贡献,说明霰的形成主要由小体积的冰晶碰并过冷水产生。 本文只是利用一個华南前汛期的降水个例对所得算法进行验证,所得的降水粒子转化情况的结论对其他天气过程的适用性还有待通过更多的个例、更丰富的观测来揭示。但是,运用双偏振雷达资料反演降水粒子类型的算法的实现,能够对后续云内相态、垂直结构及演变特征的研究提供重要参考。此外,所得结论也可以为数值模式中云微物理参数化的改进提供科学依据。 致谢:感谢国家气象科学数据中心和南京大学提供的数据服务。 参考文献(References) 曹俊武,刘黎平,葛润生,2005.模糊逻辑法在双线偏振雷达识别降水粒子相态中的研究[J].大气科学,29(5):827-836. Cao J W,Liu L P,Ge R S,2005.A study of fuzzy logic method in classification of hydrometeors based on polarimetric radar measurement[J].Chin J Atmos Sci,29(5):827-836.(in Chinese). Cao Q,Zhang G,Palmer R D,et al.,2012.Spectrum-time estimation and processing(STEP) for improving weather radar data quality[J].IEEE Trans Geosci Remote Sens,50(11):4670-4683. Chandrasekar V,Kernen R,Lim S,et al.,2013.Recent advances in classification of observations from dual polarization weather radars[J].Atmos Res,119:97-111. 程周杰,刘宪勋,朱亚平,2009.双偏振雷达对一次水凝物相态演变过程的分析[J].应用气象学报,20(5):594-601. Cheng Z J,Liu X X,Zhu Y P,2009.A process of hydrometeor phase change with dual-polarimetric radar[J].J Appl Meteor Sci,20(5):594-601.doi:10.3969/j.issn.1001-7313.2009.05.011.(in Chinese). Dolan B,Rutledge S A,Lim S,et al.,2013.A robust C-band hydrometeor identification algorithm and application to a long-term polarimetric radar dataset[J].J Appl Meteorol Climatol,52(9):2162-2186. Gao W,Sui C H,Fan J,et al.,2016.A study of cloud microphysics and precipitation over the Tibetan Plateau by radar observations and cloud-resolving model simulations[J].J Geophys Res:Atmos,121(22). 郭凤霞,马学谦,王涛,等,2014.基于X 波段双线偏振天气雷达的雷暴云粒子识别[J].气象学报,72(6):1231-1244. Guo F X,Ma X Q,Wang T,et al.,2014.An approach to the hydrometeors classification for thunderclouds based;on the X-band dual-polarization Doppler weather radar[J].Acta Meteorol Sin,72(6):1231-1244.doi:10.11676/qxxb2014.063.(in Chinese). Hall M P M,Goddard J W F,Cherry S M,1984.Identification of hydrometeors and other targets by dual-polarization radar[J].Radio Sci,19(1):132-140. 何丽华,王咏青,隆璘雪,等,2020.弱天气强迫下一次暖区MCSs发生发展研究[J].大气科学学报,43(5):810-823. He L H,Wang Y Q,Long L X,et al.,2020.Study of the occurrence and development of warm-sector MCSs for weak synoptic forcing[J].Trans Atmos Sci,43(5):810-823.doi:10.13878/j.cnki.dqkxxb.20191104002.(in Chinese). 黄浩,2018.基于最优化理论的双偏振雷达降雨参数反演研究[D].南京:南京大学. Huang H,2018.A research on optimization-based rainfall parameter retrieval using polarimetric radar data[D].Nanjing:Nanjing University.(in Chinese). Huang H,Zhao K,Zhang G F,et al.,2018.Quantitative precipitation estimation with operational polarimetric radar measurements in Southern China:a differential phase-based variational approach[J].J Atmos Ocean Technol,35(6):1253-1271. Hubbert J C,Wilson J W,Weckwerth T M,et al.,2018.S-Pols polarimetric data reveal detailed storm features (and insect behavior)[J].Bull Amer Meteor Soc,99(10):2045-2060. Kumjian M R,Ryzhkov A V,2008.Polarimetric signatures in supercell thunderstorms[J].J Appl Meteorol Climatol,47(7):1940-1961. Lee W C,Dodge P,Jr Marks F D,et al.,1994.Mapping of airborne Doppler radar data[J].J Atmos Ocean Technol,11(2):572-578. Liu H,Chandrasekar V,2000.Classification of hydrometeors based on polarimetric radar measurements:development of Fuzzy Logic and Neuro-Fuzzy Systems,and in situ verification[J].J Atmos Ocean Technol,17(2):140-164. 閔锦忠,贾瑞怡,王晨珏,2018.苏北一次强降水超级单体风暴过程的诊断分析[J].大气科学学报,41(4):463-474. Min J Z,Jia R Y,Wang C J,2018.Diagnostic analysis on a heavy precipitation supercell storm process in northern Jiangsu[J].Trans Atmos Sci,41(4):463-474.doi:10.13878/i.cnki.dqkxxb.20160311001.(in Chinese). Park H S,Ryzhkov A V,Zrnic' D S,et al.,2009.The hydrometeor classification algorithm for the polarimetric WSR-88D:description and application to an MCS[J].Wea Forecasting,24(3):730-748. Schuur T,Ryzhkov A,Heinselman P,et al.,2003.Observations and classification of echoes with the polarimetric WSR-88D radar[R].Report of the National Severe Storms Laboratory. 沈艳,潘旸,宇婧婧,等,2013.中国区域小时降水量融合产品的质量评估[J].大气科学学报,36(1):37-46. Shen Y,Pan Y,Yu J J,et al.,2013.Quality assessment of hourly merged precipitation product over China[J].Trans Atmos Sci,36(1):37-46.(in Chinese). Straka J M,Zrnic D S,1993.An algorithm to deduce hydrometeor types and contents from multi-parameter radar data[C]//26th Conf on Radar Meteorology.Norman:Amer Meteor Soc:513-515. Vivekanandan J,Zrnic D S,Ellis S M,et al.,1999.Cloud microphysics retrieval using S-band dual-polarization radar measurements[J].Bull Am Meteor Soc,80(3):381-388. 王德旺,刘黎平,宗蓉,等,2015.基于模糊逻辑的大气云粒子相态反演和效果分析[J].气象,41(2):171-181. Wang D W,Liu L P,Zong R,et al.,2015.Fuzzy logic method in retrieval atmospheric cloud particle phases and effect analysis[J].Meteor Mon,41(2):171-181.doi:10.7519/j.issn.1000-0526.2015.02.005.(in Chinese). 王易,徐芬,吴海英,2019.一次致雹超级单体结构特征分析[J].大气科学学报,42(4):612-620. Wang Y,Xu F,Wu H Y,2019.Structure characteristics analysis of a supercell hailstorm[J].Trans Atmos Sci,42(4):612-620.(in Chinese). 杨文霞,胡朝霞,董晓波,等,2018.降水性层状云结构及微物理量相关性分析[J].大气科学学报,41(4):525-532. Yang W X,Hu Z X,Dong X B,et al.,2018.A study on the microphysical structure and the correlation of microphysical parameters of the precipitation stratiform cloud[J].Trans Atmos Sci,41(4):525-532.(in Chinese). 俞小鼎,姚秀萍,熊廷南,等,2007.多普勒天气雷达原理与业务应用[M].北京:气象出版社. Yu X D,Yao X P,Xiong T N,et al.,2007.Principle and operational application of Doppler Weather Radar[M].Beijing:China Meteorological Press.(in Chinese). 张培昌,魏鸣,黄兴友,等,2010.偏振多普勒天气雷达原理和应用[M].北京:气象出版社. Zhang P C,Wei M,Huang X Y,et al.,2010.Principle and application of polarization Doppler Weather Radar[M].Beijing:China Meteorological Press.(in Chinese). 赵果,王致君,贾伟,等,2016.双线偏振天气雷达有效探测范围研究[J].高原气象,35(1):244-250. Zhao G,Wang Z J,Jia W,et al.,2016.Study of the effective detection range of the dull-polarized radar[J].Plateau Meteor,35(1):244-250.doi:10.7522/j.issn.1000-0534.2014.00145.(in Chinese). In this study,based on the quality-controlled S-band dual-polarization radar gridded observation data,a hydrometeors classification recognition algorithm is established,so as to analyze the spatial distribution and evolution of hydrometeors in the precipitation process by using the fuzzy logic algorithm,as well as the characteristics of hydrometeors scattering and spatial orientation.This algorithm can classify hydrometeors into different types such as liquid,ice,and mixed states,which is helpful in finding the key structures of cloud microphysics which affect the precipitation.First,the membership function is obtained according to the radar echo characteristics of hydrometeors.Second,according to the different contributions of radar observation variables in identifying hydrometeor types,the weight of the membership function value corresponding to each observation value is determined,and,after the weighted average of each function value is obtained,then the logical value corresponding to hydrometeors types is obtained as well.Finally,the integration and defuzzification processing is performed,and the maximum value of the logical value in each grid point is selected,after which the hydrometeor type represented by the value is considered to be the particle type represented by the grid point.When determining the weight of the membership function corresponding to the observed value,the horizontal reflectance factor and ambient temperature are taken as the direct influence factors for calculating the hydrometeor types,and,instead of the weighted average calculation,an algorithm for hydrometeor types recognition based on the parameters of S-band dual polarization radar and the ambient temperature is proposed.Next,the rationality of the algorithm is verified by means of a precipitation process in the pre-flood period of South China using radar and precipitation data.The study results show that the distribution characteristics of the rain-type obtained by the inversion are basically consistent with the distribution characteristics of the actual observed precipitation,which proves that the algorithm is able to reflect the hydrometeor types in the precipitation area,and that the recognition results are basically reasonable.Further research shows that there are a large number of drizzle-type particles present in the air before the occurrence of precipitation,and that there is a negative correlation between the changes of drizzle and rain particles during the process of precipitation,thereby indicating that this precipitation is mainly caused by the collision of drizzle and rain particles. hydrometeor types;fuzzy logic algorithm;dual polarization radar doi:10.13878/j.cnki.dqkxxb.20200318001 (責任编辑:刘菲)
