一种基于极化圆周SAR图像的陆上桥梁提取方法
2021-07-05 11:30谭向程安道祥陈乐平周智敏
雷达学报 2021年3期
谭向程 安道祥陈乐平 周智敏
(国防科技大学电子科学学院 长沙 410073)
1 引言
随着高分辨率合成孔径雷达(Synthetic Aperture Radar,SAR)技术的发展,基于SAR图像的人造目标检测与识别,一直是遥感领域内的研究热点之一。桥梁作为重要的人造基础设施,无论是对于国民经济发展,还是军事行动都具有重要作用。因此,开展基于SAR图像的桥梁检测一直是雷达图像解译的重要内容之一。
针对基于SAR图像的桥梁提取问题,人们已经开展了很多研究,并提出了一些有效的检测方法。例如,Han等人[1]通过对SAR图像进行纹理分析,将桥梁下方的河流分割出来,然后利用桥梁的形状,以及河流与桥梁的位置关系等先验知识实现桥梁检测。Luo等人[2]利用基于高斯马尔可夫随机场模型的支持向量机分类方法(Support Vector Machine of Gauss Markov Random Field model,GMRF-SVM)提取河流水体,然后基于提取出来的河流水体图像,检测桥梁主干。赵冠雄等人[3]通过改进的最大类间方差(Otsu)阈值分割方法与形态学处理提取河流,然后基于河流主干线,实现桥梁检测。Zhang等人[4]提出了一种多尺度分解模型和区域分析相结合的河流提取方法,然后根据河流与桥梁的位置关系来检测桥梁。刘春等人[5]首先基于水平集分割方法实现水陆分割,然后通过水域分支扫描和跟踪提取狭窄的水域分支,最后通过确定水域之间近距离区域实现桥梁检测。张永梅等人[6]利用多光谱图像的颜色特征进行水陆分割,得到疑似桥梁区域,再分别提取全色和SAR图像中的疑似桥梁区域的纹理特征和区域均值比特征,结合三者结果,得到桥梁识别结果。熊伟等人[7]基于SAR图像局部区域灰度均值和方差二维特征模糊分割水体,进而利用桥梁的几何特征先验知识实现桥梁检测。
由上述可知,现有基于SAR图像的桥梁检测主要是针对水上桥梁(如图1所示),且核心思想和采用的处理流程比较类似(如图2所示)。可概括为:首先,基于河流水体的特殊散射特征(类似镜面散射),从SAR图像中准确地提取出河流;然后,根据桥梁将河流截断为两部分的特点,同时结合桥梁的几何结构特征,在河流的截断处检测定位桥梁。
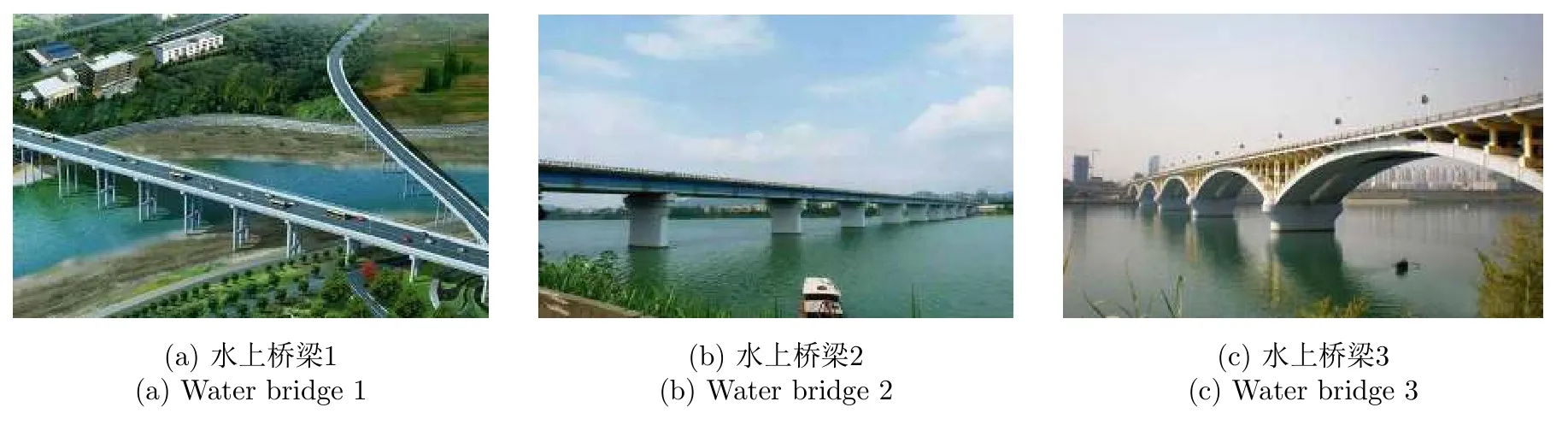
图1 水上桥梁Fig.1 Water bridges
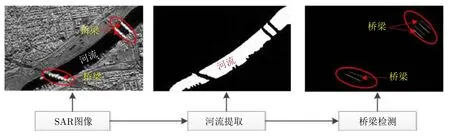
图2 基于SAR图像的水上桥梁检测流程图Fig.2 The flow chart of water bridge detection based on SAR image
在现实生活中,除了水上桥梁外,人们还建造了大量的陆上桥梁(如图3所示),使无数天堑变通途,极大地方便了人们的出行。今天,陆上桥梁也已经成为重要的交通设施之一,并在国民经济发展、军事安全和人们日常生活中发挥着不可或缺的重要作用。
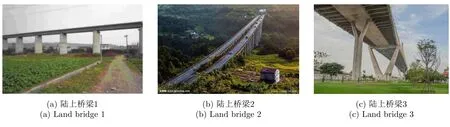
图3 陆上桥梁Fig.3 Land bridges
那么如何基于SAR图像实现陆上桥梁的准确检测与定位,便成为一个需要深入研究的重要问题。然而,与水上桥梁不同,陆上桥梁的下方不再是河流,而是土壤、植被、砂砾等陆地背景。这种陆地背景的电磁散射特性与河流等水体完全不同,因此在SAR图像上的表现特征也完全不同。
图4(a)和图4(b)分别给出了SAR图像中的水上桥梁和陆上桥梁所在区域(图4中的红色圆圈标记)。对比两幅图像可发现如下差异:
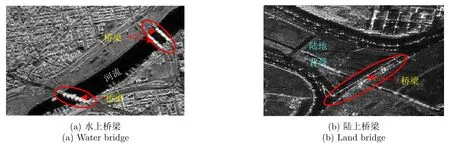
图4 水上桥梁和陆上桥梁的SAR图像Fig.4 The water bridges and land bridges in SAR image
(1)在电磁波照射下,水体的电磁散射为镜面反射,散射强度小,因此河流的SAR图像灰度值很小,对应的区域偏“黑”,与周围地物之间的差别明显,易于提取;而陆上桥梁下方的陆地地物的电磁散射大多数为漫散射,产生的SAR图像灰度值较大,对应的区域偏“亮”,与周围地物之间的差别较小,不易提取。这种差异使得利用传统的河流提取方法很难准确地提取出陆地背景。
(2)水上桥梁与河流的位置关系非常明确,即水上桥梁将河流截断为多个部分。因此,在准确提取出河流后,再检测出截断位置,即可定位桥梁位置。然而,对于陆上桥梁来说,由于陆地背景通常表现为不规则的区域,而桥梁又包含在陆地背景中,因此很难像水上桥梁检测那样,通过陆上桥梁和陆地背景的位置关系,来准确定位陆上桥梁,从而增加了陆上桥梁检测、定位的复杂性和难度。
由上述分析可知,水上桥梁与陆上桥梁在SAR图像中所表现出的特征差异很大。与水上桥梁相比,陆上桥梁的提取处理更加复杂,难度更大。我们曾尝试采用图2所示的水上桥梁检测流程来提取陆上桥梁,发现难以获得令人满意的检测结果。
从可查阅的文献来看,目前已有基于SAR图像的桥梁检测方法几乎都是针对水上桥梁,所给出的实测数据处理结果也都是水上桥梁,而基于SAR图像的陆上桥梁检测方法和相应的实测数据处理结果却鲜有研究和报道。此外,现有的桥梁检测几乎都是基于传统直线轨迹SAR(Linear Synthetic Aperture Radar,LSAR),即雷达搭载平台沿直线飞行轨迹对观测目标进行SAR成像。由于飞行轨迹要始终保持直线状态,因此雷达波束只能从某个固定角度照射观测目标。换言之,LSAR无法获取观测目标的多角度散射特征。这种成像模式在水上桥梁检测中虽然没有影响,但却不利于陆上桥梁的检测。例如,当LSAR平台飞行轨迹垂直于陆上桥梁时,雷达波束照射方向将与桥梁走向一致,则在获取的LSAR图像中,陆上桥梁将与两端连接的道路融为一体,不易分辨和提取。
圆周SAR(Circular Synthetic Aperture Radar,CSAR)是近年新兴起来的一种成像模式[8–14]。与LSAR相比,CSAR通过雷达搭载平台绕观测区域作圆周飞行,不但能够获得更高的图像分辨率,其所获取的观测目标的全方位散射信息,还能够有效提高复杂目标的检测识别精度。例如,Luo等人[15]基于CSAR图像通过改进ROEWA边缘检测算子,提高了道路检测精度。李洋等人[16]基于CSAR提取目标的特征参数序列,提高了地物分类精度。Chen等人[17]基于CSAR三维成像,重构了普通车辆等的三维结构,提高了车辆目标的检测识别精度。基于极化CSAR数据,Xue等人[18,19]分析了目标的散射特征随方位向的变化情况,将地物目标分为各向异性和各向同性目标,然后通过Cloude分解提取地物目标的极化熵、平均散射角等散射特征,研究地物目标的散射类型进行分类,提高了地物目标的分类精度。
本文在已有桥梁检测研究基础上,提出了一种基于极化圆周SAR(CSAR)的陆上桥梁提取方法。与已有水上桥梁检测思想不同,所提方法不再依赖于对桥梁下方背景(如河流)的提取,而是采用提取观测目标的全方位极化散射特征,进而通过利用陆上桥梁与陆地背景间的全方位极化散射特征差异,来实现陆上桥梁的分离、检测和定位,从而有效解决现有基于LSAR图像能够准确提取水上桥梁,却不易提取陆上桥梁的问题。
本文结构安排如下:第2节介绍了基于圆周极化熵的疑似桥梁区域与陆地背景的分离方法;第3节给出了基于极化熵方差特征的虚假目标抑制方法;第4节阐述了基于桥梁几何特征的桥梁定位方法,以及本文所提算法的处理流程;第5节给出了利用所提方法对某机载L波段极化CSAR实测数据的处理结果,以证明所提方法的有效性和实用性;第6节为本文总结和未来研究展望。图5给出了本文提出的陆上桥梁提取方法结构框架。
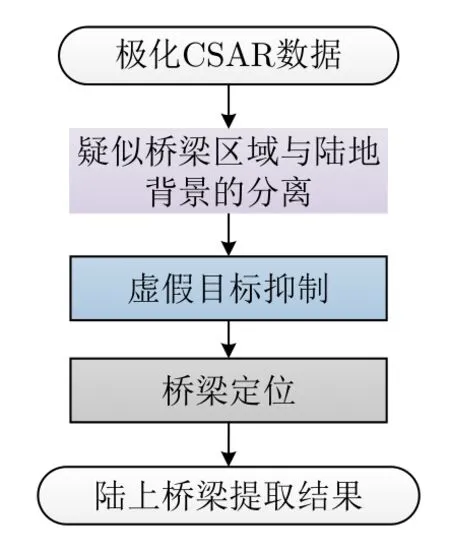
图5 基于极化CSAR数据的陆上桥梁提取结构图Fig.5 Block diagram of land bridge extraction based on polarization CSAR data
2 基于圆周极化熵的疑似桥梁与陆地背景的分离
2.1 观测目标的散射特征分析
众所周知,在实际SAR成像中,观测目标通常都具有不同的几何结构特征,且这种特征具有方位向差异性,因此当电磁波从不同方向照射到观测目标上时,接收到的回波信号将表现出不同的极化散射特征。
图6给出了几种不同地物目标的电磁散射特征示意图。可发现,当雷达电磁波从不同角度观测地物目标时,陆地背景将表现为漫反射或体散射(如图6(a)所示),房屋将表现为二次散射(如图6(b)所示)。而对于桥梁来说,当雷达电磁波从B方向(即垂直于桥梁的走向)照射桥梁时,桥梁主要表现为二次散射,当雷达电磁波从A方向(即顺着桥梁走向)照射桥梁时,桥梁则将表现为一次散射(镜面散射)。由此可知,桥梁具有不同于其它地物的全方位电磁散射特征。

图6 不同地物的电磁散射特征意图Fig.6 Schematic diagram of electromagnetic scattering characteristics of different objects
然而,在传统的极化LSAR(Polarization Linear SAR,Pol-LSAR)中,由于雷达搭载平台沿直线轨迹飞行,观测角度有限,因此只能获取观测目标在某个单一小角度内的极化散射特征,这种与电磁波照射角度相关的电磁散射特征差异性尚不明显。与之相比较,CSAR的全方位成像模式,则能够获取观测目标在0°~360°范围内的全方位向上的极化散射特征。由于不同目标具有不同的全方位极化散射特征,因此利用这种差异,即可实现对不同目标的分辨识别。本文正是基于这种思想,提出了基于极化CSAR的陆上桥梁提取方法。
2.2 圆周极化熵(Circular Polarization Entropy,CPE)特征与背景分离
通常情况下,目标的极化散射矩阵参数能够完整地描述目标在某个观测角度上的后向电磁散射特征。极化散射矩阵表达式为
其中,h,v分别表示水平极化和垂直极化。
极化分解是研究目标散射特征的有效方法,而Cloude分解则是一种典型的极化分解方法[20]。其原理是对相干矩阵进行特征值分解,然后根据获得的特征值,计算出极化熵等特征参数,其中极化熵则可用于衡量目标散射过程的复杂性。
假设观测目标满足散射互易性条件,则有Shv=Svh。基于Pauli基将散射矩阵变换成极化散射矢量,可得

其中,上标T表示矩阵转置运算。
极化散射矢量对应的相干矩阵T为
其中,上标H表示矩阵共轭转置运算,n为像素点的数量。为了减少斑点、噪声等因素的影响,取中心像素点附近多个像素点的相干矩阵平均值作为真实的相干矩阵。
对相干矩阵T进行特征值分解,得

其中,U是特征向量uk构成的矩阵,Σ是特征值λk构成的对角阵。
在Cloude极化分解模型中,极化熵定义为
其中,H表示极化熵。
为了分析观测目标在多个观测角度下的散射性质,Xue等人[18]提出了多角度极化熵,用来描述观测目标的散射特征在多个观测角度下的复杂性。为了充分发挥出CSAR全方位成像的特点与优势,我们结合多角度极化熵对传统Cloude极化分解模型进行改进,使其能够有效提取出观测目标的全方位极化散射特征。
本文所提的极化CSAR 处理思想为:首先,将360°全孔径的极化CSAR数据划分成I个子孔径(每个子孔径对应于不同的方位角);然后,对每个子孔径的相干矩阵进行特征值分解,提取每个子孔径的极化散射特征值。每个子孔径极化熵反映了观测目标在对应子孔径方向上的后向极化散射特征,在改进的Cloude极化分解模型中,我们提取观测目标的圆周极化熵(CPE)特征,即
其中,HCPE表示圆周极化熵,表示第i个 子孔径的极化散射特征向量,I表示子孔径数量。
本文所提取的CP E是极化熵在SAR圆周成像模式下的扩展。传统极化熵描述了目标散射过程的不确定性,而CPE除包含这种不确定性外,还包含了观测目标极化散射特征的方位向差异性。每个子孔径对应于不同的方位角范围,观测目标在某个子孔径下的极化散射特征,实际上是观测目标在该方位角范围内极化散射特征的平均。当全孔径的极化CSAR数据划分的子孔径数量越多时,每个子孔径对应的方位角范围越小,单个子孔径下目标的极化散射特征越接近该方向的真实值,CPE对目标极化散射特征的方位向差异描述越细腻。
当CPE值较低时,表示观测目标的散射过程具有较高的确定性,或者观测目标在某些观测角度下的后向散射特征与在其它观测角度下的后向散射特征有明显区别,则可以判断该目标为各向异性目标;反之,当CPE值较高时,表示观测目标的散射过程具有较高的不确定性,且观测目标在不同观测角度下的后向散射特征相似,则可判断该目标为各向同性目标。与Xue等人提出的多角度极化熵相比,CPE描述的是目标在360°全方位向上的散射特性,而多角度极化熵描述的是目标在几个方向上的散射特征,CPE对目标散射特性的描述更加全面。
由于桥梁、建筑、雕塑等疑似桥梁目标具有特定的形状,散射过程具有较高的确定性,后向散射特征与观测角度相关,属于各向异性目标,因此其CPE值较小。相比之下,裸土、植被等陆地背景,散射过程具有非常高的不确定性,且后向散射特征不随观测角度变化,属于各向同性目标,因此CPE值较高。基于这种差异我们便可实现疑似桥梁目标与裸土、植被等陆地背景的分离,得到疑似桥梁目标。分离规则如下:

其中,(x,y)表示像素点的坐标,γ表示阈值。
阈值的确定是实现疑似桥梁目标与陆地背景分离非常关键的问题。在不同的成像条件下,目标与背景的CPE不同,阈值也有所不同。为了满足自动分割要求,本文采用Otsu分割方法确定阈值,该阈值可以根据不同的CPE灰度图自动选择。
为了比较现有的桥梁检测方法应用于陆上桥梁检测和本文所提陆上桥梁检测方法的性能差异,我们分别采用传统水上桥梁检测方法和本文所提陆上桥梁检测方法对同一地区的陆上桥梁进行提取处理。图7(b)给出了利用赵冠雄等人在文献[3]提出的水上桥梁检测方法,所获得的桥梁下方的背景提取结果。可发现,由于陆上桥梁的背景不是河流,是陆地,而陆地的灰度、形状结构与河流有本质的区别,所以利用文献[3]的方法无法像水体提取那样,准确地提取出桥梁下的陆地背景,且陆地背景不会被桥梁分割成两部分。因此,无法继续应用水上桥梁检测的后续处理步骤(如图2所示)进一步提取出陆上桥梁。此外,基于灰度图像的陆地背景提取结果中,桥梁目标的信息不够完整。因此,如果在此基础上直接检测桥梁,会导致桥梁检测出现非常大的误差。
图7(c)给出了采用本文方法获得的陆上桥梁与陆地背景的分离结果。首先,计算该场景的CPE;然后,基于Otsu分割方法确定陆上桥梁与陆地背景的分离阈值为0.6118;最后,根据CPE结果中大于该阈值的像素点为陆地背景,小于该阈值的像素点为疑似桥梁区域,实现陆上桥梁与陆地背景的分离。可发现,本文方法能够有效实现陆上桥梁与陆地背景的分离,且桥梁信息保持完好。尽管分离后的结果中含有大量非桥梁的虚假目标,但可通过采取其它方法进行有效抑制(请见本文第3节),最终实现对陆上桥梁的准确提取。
3 基于极化熵方差特征和几何形状的虚假目标抑制
现实生活中,除桥梁外,房屋、桥梁邻近区域内的建筑等人造目标,都具有特定的结构、形状和朝向。这些目标的散射过程也具有较高的确定性,或者这些目标在某些观测角度下的后向散射特征与在其它观测角度下的后向散射特征明显不同,这导致它们的CPE也较低。因此,在疑似桥梁目标与陆地背景的分离结果中,会包含很多虚假目标。为准确定位桥梁位置,需要有效抑制虚假目标,确定包含桥梁的区域。
桥梁的散射方位向差异特征和桥梁的结构尺寸特征与其它虚假目标有较为明显的区别,而利用这种差异即可抑制非桥梁的虚假目标。
3.1 基于极化熵方差特征的虚假目标抑制
图8(a)为某观测场景的光学图像,其中红色椭圆标记的地物为一座陆上桥梁,黄色圆圈标记的地物为房屋。图8(b)为雷达电波观测方向与桥梁走向平行时(即图8(a)中的蓝色箭头方向),观测场景的极化熵图像。图8(c)为雷达电波观测方向与桥梁走向垂直时(即图8(a)中的绿色箭头方向),观测场景的极化熵图像。在两幅极化熵图像中,像素点亮暗程度表示极化熵大小,对应关系如图8(b)和图8(c)所示。
对比图8(b)和图8(c)可发现,当雷达电波观测方向与桥梁走向平行时,桥梁的极化熵较高,而房屋的极化熵较低;当观测方向与桥梁走向垂直时,桥梁和房屋的极化熵都比较低。由此可知,当雷达电波观测方向发生变化时,桥梁的极化熵变化较大,而房屋的极化熵变化较小。这是因为当观测目标表现为表面散射时,目标的散射过程不确定性较高,导致极化熵较高;当观测目标表现为二次散射时,目标的散射过程确定性较高,导致极化熵较低。在实际情况中,桥梁两端(短边)通常与道路相连接,而桥梁两侧(长边)则悬空或是架于桥柱之上。因此,当雷达电波观测方向与桥梁走向平行时,桥梁散射特征与其两端连接的道路散射特征非常相近,此时桥梁主要表现为表面散射,桥梁的极化熵较高;当雷达电波观测方向与桥梁走向垂直时,桥梁主要表现为二次散射,此时桥梁的极化熵较低。
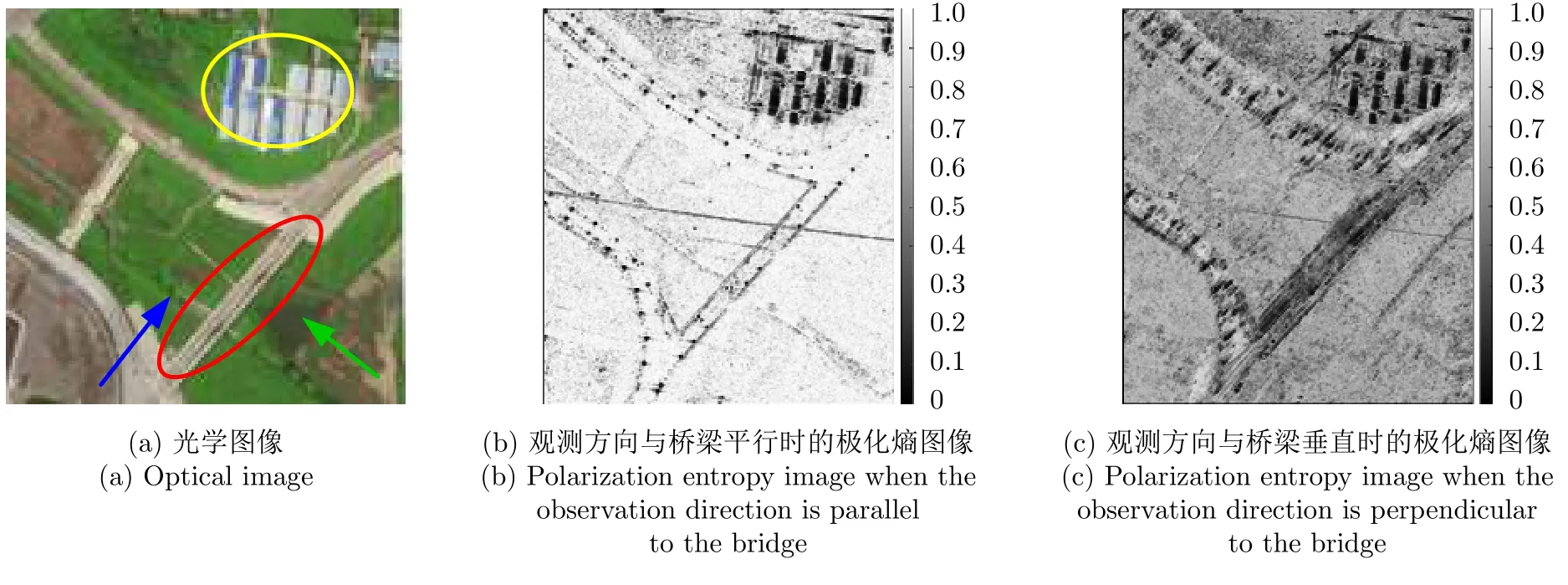
图8 观测场景的光学图像和不同观测方向下获得的极化熵图像Fig.8 The optical image of the observation scene and the polarization entropy image obtained under different observation directions
由上述可知,当雷达电波观测方向发生变化时,桥梁表现出的散射特征也将发生变化。相应地,桥梁极化熵也将发生较大变化。与桥梁相比,房屋都是孤立存在,房屋的四周都为典型的二面角特征。当雷达电波观测方向发生变化时,房屋均表现为二次散射,因此房屋在不同观测方向下的极化熵变化较小。利用桥梁和房屋在雷达电波不同观测方向的极化熵差异,即可分辨出桥梁和房屋,进而对房屋等虚假目标进行有效抑制。
为衡量圆周观测情况下,不同观测目标散射特征的方位向差异,本文提取观测目标的极化熵方差特征,即
其中,DH表示极化熵方差,Hi表示第i个子孔径的极化熵,表示极化熵在I个子孔径上的平均值。DH描述的是在不同子孔径下的观测目标极化熵的变化方差。DH值越大,表示目标的散射特征沿方位向的变化越大(如方形、多边形等目标);反之,DH值越小,表示目标的散射特征沿方位向的变化越小(如圆形、球形等目标)。
以DH值为特征矢量,利用K-mean分类方法,将疑似桥梁目标分为两类:DH值较大的目标和DH值较小的目标。根据前文分析可知,通常尺寸较大的疑似桥梁目标都是人造目标。在人造目标中,桥梁由于特殊几何结构,具有较大的DH值,其它目标的DH值较小。因此,通过判断观测目标的DH值,即可抑制房屋等大尺寸虚假目标。在此基础上,再通过观测目标的结构尺寸特征,进一步抑制小尺寸虚假目标。
3.2 基于桥梁几何结构特征的小尺寸虚假目标抑制
除散射方位向差异特征不同外,桥梁与其它地物在几何形状特征方面也存在较大差别。主要表现在:绝大多数陆上桥梁近似为长方形,尺寸较大,且长边与短边的尺寸相差也较大;与之相比较,其它地物尺寸相对较小,且长边与短边的尺寸相差也较小。
因此,通过对地物在360°方向上进行投影,可提取地物的结构尺寸特征。
令yi=fi(α)表示第i个疑似桥梁目标,在α方向上的投影长度,则有

其中,α表示投影方向。
基于上式,可以提取出所有疑似桥梁目标的几何结构特征参数,即
其中,PW表示第i个疑似桥梁目标的宽度,PL表示第i个疑似桥梁目标的长度,PR表示第i个疑似桥梁目标的宽度与长度之比,αi-spindle表示目标主轴方向。
以观测目标的几何尺寸参数为特征矢量,利用K-mean分类方法,将剩余的疑似桥梁目标同样分为两类:大尺寸目标和小尺寸目标,并选大尺寸目标作为提取的陆上桥梁。
综合上述分析,本文所提方法在实现疑似桥梁目标与陆地背景的分离之后,首先根据极化熵方差特征(DH)有效抑制房屋等大尺寸虚假目标;然后根据目标几何尺寸特征进一步抑制小尺寸虚假目标,最终提取出桥梁目标。
4 基于直线特征提取的桥梁定位
陆上桥梁通常包含桥梁和桥头邻近的地物,其长度和宽度比桥梁实际的长度和宽度都要大。因此要实现陆上桥梁的提取,还需要根据桥梁的几何特征定位桥梁,待检测的桥梁目标应是同时满足以下条件的两条平行直线段:
(1)它们基本上是平行的;
(2)直线段的长度Lb满足Lb≥PL/2;
(3)这两条直线段之间的距离Wb满足Wb≥PW/2。
基于直线特征提取的陆上桥梁定位的具体处理流程如下:
步骤1 边缘检测。先对桥梁区域进行基于Canny算子的边缘检测。
步骤2 直线参数提取。对边缘检测结果进行基于Hough变换的直线检测并获取检测结果的斜率和截距。
步骤3 遍历搜索。对Hough变换得到的直线段的斜率和截距进行统计,筛选得到斜率与主轴方向差距较小的直线段集合,以这个集合中斜率和截距的最小值和最大值为范围,进行遍历搜索,选择与桥梁区域边缘重合率最高的直线,用以定位桥梁。
图9给出了本文所提基于极化圆周SAR图像陆上桥梁提取方法的处理流程图。
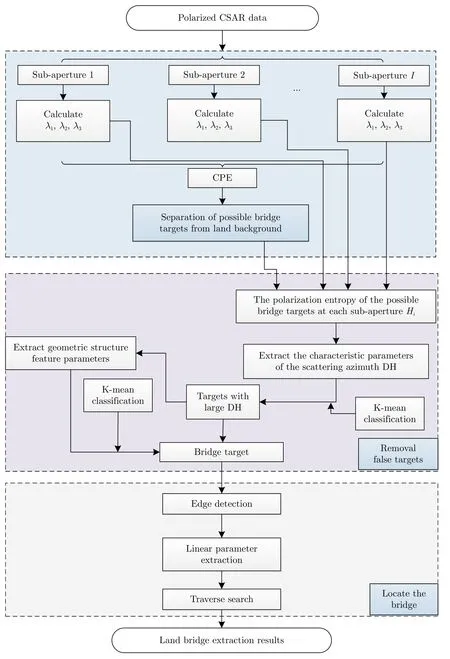
图9 基于极化CSAR数据的陆上桥梁提取处理流程图Fig.9 The flow chart of land bridges extraction based on polarized CSAR data
5 实验结果
为了验证本文所提方法的正确性、有效性和实用性,我们开展了基于某机载L波段全极化CSAR实测图像数据的陆上桥梁提取处理,图像分辨率约为1m。图10给出了该观测场景的光学图像以及不同极化方式下的CSAR 图像。在极化CSAR实测数据成像中,本文将360°的完整圆周孔径划分成25个子孔径数据。每个子孔径包含Shh,Shv,Svv3幅图像。
5.1 基于圆周极化熵(CPE)的疑似桥梁区域与陆地背景的分离
为了让实测数据处理结果的展示更加清晰,我们将该场景地区1和地区2(如图10(a)所示)的桥梁提取结果分别进行展示。首先,计算该场景两个地区的圆周极化熵(CPE);其次,采用Otsu阈值分割方法确定阈值;然后,以阈值为依据,对CPE结果进行疑似桥梁区域与陆地背景的分离。

图10 观测场景的光学图像与极化CSAR图像Fig.10 Optical image and polarized CSAR images of the observation scenes
表1给出了利用Otsu分割方法确定的地区1和地区2疑似桥梁区域与陆地背景的分离阈值,大于该阈值的像素点确定为陆地背景,小于该阈值的像素点确定为疑似桥梁区域。图11给出了地区1的光学图像、CPE结果和疑似桥梁目标提取结果。图12给出了地区2的光学图像、CPE结果和疑似桥梁目标提取结果。其中目标A和目标E都是陆上桥梁;目标B、目标C和目标D为其它典型的各向异性目标。表2给出了桥梁和陆地背景的CPE均值,证明了桥梁的CPE比陆地背景的CPE低,并且两者具有明显差异,可以基于CPE实现桥梁和陆地背景的分离。观察图11(c)和图12(c)可发现:包括桥梁在内的很多各向异性目标都成功地从陆地背景中分离出来。
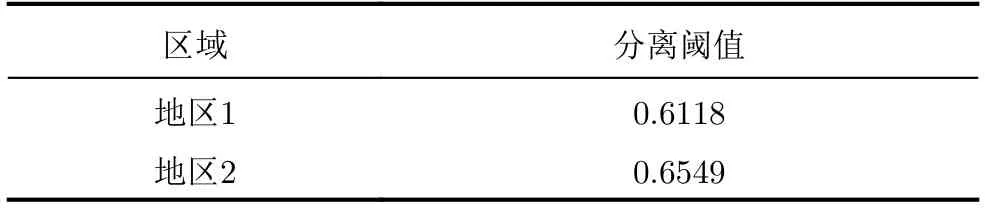
表1 疑似桥梁区域与陆地背景的分离阈值Tab.1 The separation threshold between possible bridge region and land background
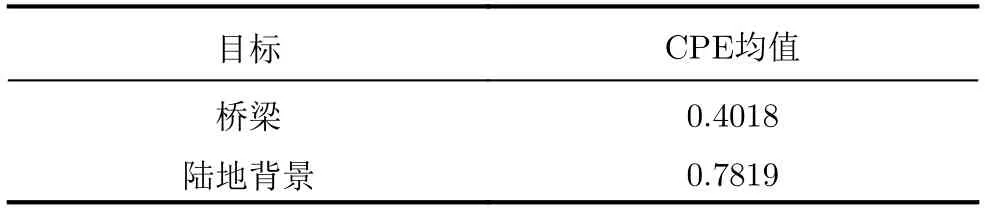
表2 桥梁和陆地背景的CPE均值Tab.2 The CPE mean value of land bridge and its background
疑似桥梁目标与陆地背景的分离结果表明:根据CPE能将桥梁等各向异性目标从陆地背景中分离出来。
5.2 基于极化熵方差特征和结构尺寸特征的虚假目标抑制
为提高算法效率,先利用形态学滤波将面积非常小的目标去掉。然后采用本文第3节描述的方法,抑制虚假目标,提取桥梁目标。首先,以DH值为特征矢量,利用K-mean分类方法,将疑似桥梁目标分为两类;然后,以几何形状参数为特征矢量,利用K-mean分类方法,将DH值大的疑似桥梁目标分为大尺寸和小尺寸两类目标,并选择尺寸大的目标作为提取的桥梁目标。
图13给出了图11(a)和图12(a)中几种典型的疑似桥梁目标的极化熵方差特征参数。实测数据处理结果表明:桥梁(目标A和目标E)的DH值较大,而一些尺寸较大的人造目标如房屋(图11中的目标C)的DH值较小。以DH为特征矢量,利用K-mean将疑似桥梁目标分成两类,能够将桥梁与其它尺寸较大的人造目标分开,从而抑制虚假目标。
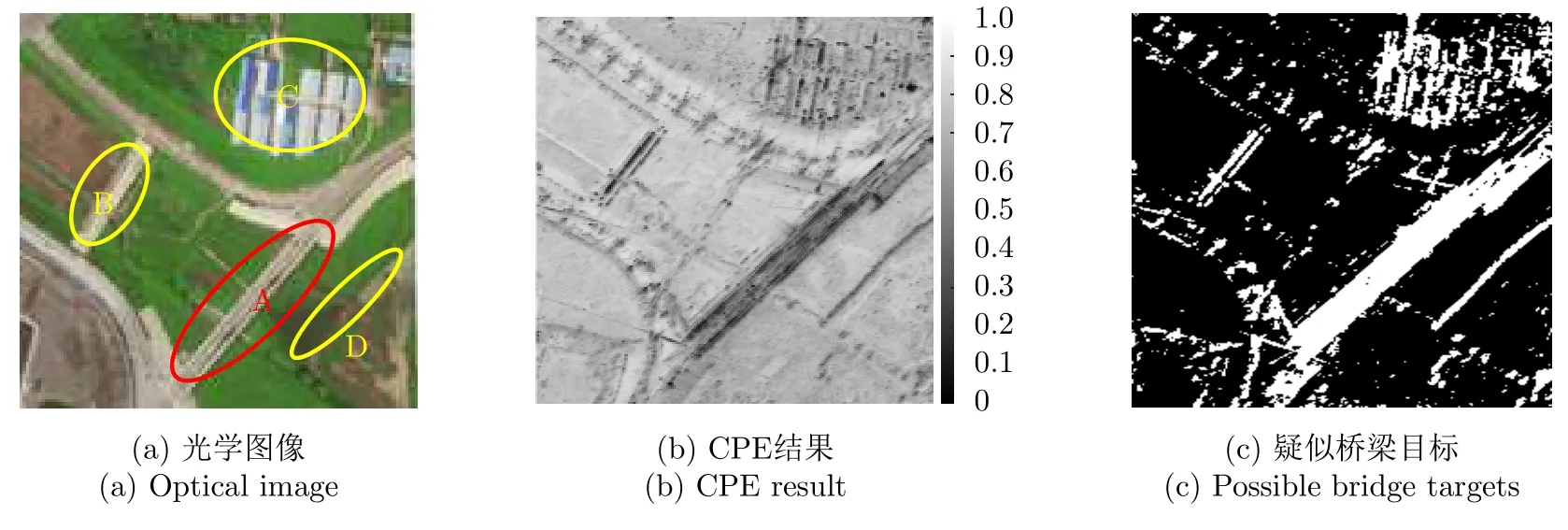
图11 地区1的光学图像、CPE结果和疑似桥梁目标Fig.11 Area1:Optical images,CPE result and possible bridge targets
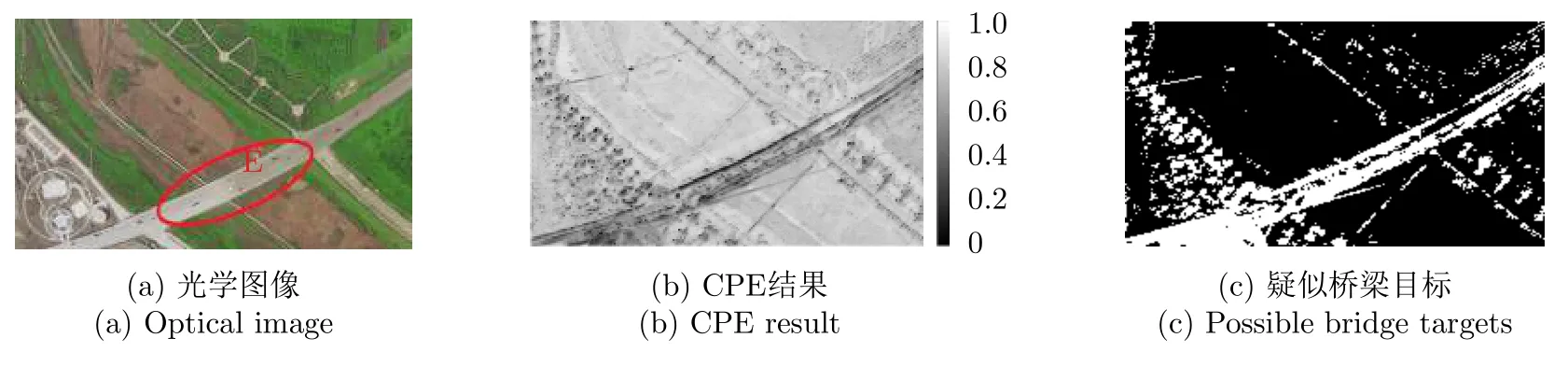
图12 地区2的光学图像、CPE结果和疑似桥梁目标Fig.12 Area2:Optical images,CPE result and possible bridge targets
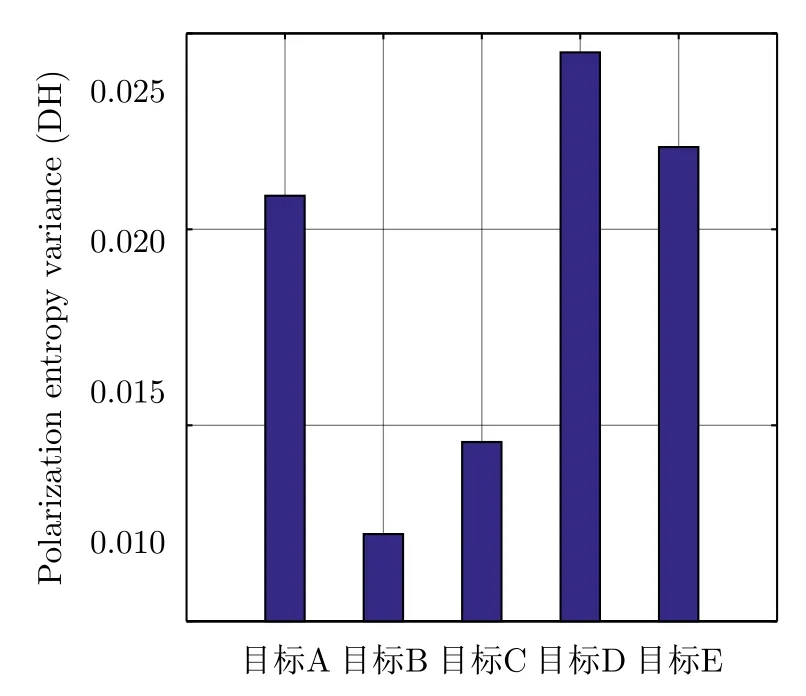
图13 不同疑似桥梁目标(如图11(a)所示)的DH值Fig.13 The DH values of different possible bridge targets(As shown in Fig.11(a))
图14和图15分别给出地区1和地区2的虚假目标抑制处理结果。以地区1为例,图14(b)给出了基于极化熵方差特征的分类结果,疑似桥梁目标被分成DH值较大的目标(图14(b)中黄色目标)和DH值较小的目标(图14(b)中紫红色目标),图14(c)给出了去掉DH值小的虚假目标后的结果。处理结果表明:根据DH值差异能有效抑制房屋等大尺寸虚假目标。图14(d)给出了基于几何结构尺寸的分类结果,图14(e)给出了抑制小尺寸虚假目标后的结果。处理结果表明:根据几何结构尺寸差异能有效抑制小尺寸虚假目标。

图14 地区1抑制虚假目标的处理结果Fig.14 Processing result of removing false targets in area1
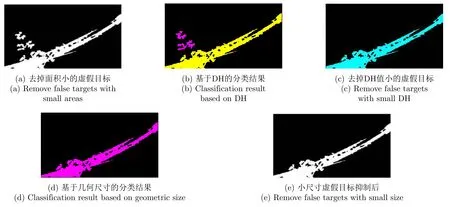
图15 地区2抑制虚假目标的处理结果Fig.15 Processing result of removing false targets in area2
上述实测数据处理结果表明:根据桥梁散射特征的方位向差异和几何结构特征能有效去除虚假目标,从而准确地提取出陆上桥梁目标。
5.3 基于桥梁几何特征的桥梁定位与提取
对上述桥梁目标提取结果进行边缘检测和直线检测处理,统计线段集的斜率和截距范围。以统计的斜率和截距为范围,进行遍历搜索,选择与桥梁边缘重合率最高的直线,作为桥梁定位结果。
表3分别给出了地区1和地区2的桥梁两边所在直线的参数值。
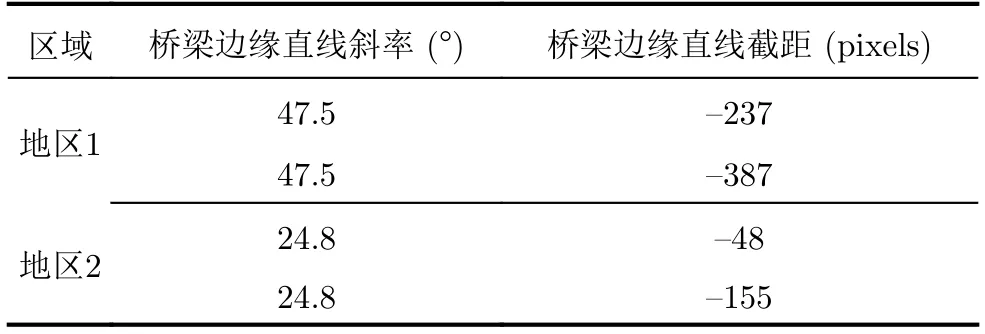
表3 桥梁边缘所在直线参数Tab.3 Straight line parameters at the edge of the bridges
图16和图17分别给出了地区1和地区2的陆上桥梁提取结果和对应的光学图像。图16(c)和图17(c)分别为将地区1和地区2陆上桥梁提取结果叠加在SAR图像上的效果图。由图16和图17可知,这两座陆上桥梁都被准确地检测出来,表明本文所提陆上桥梁检测方法的有效性和实用性。
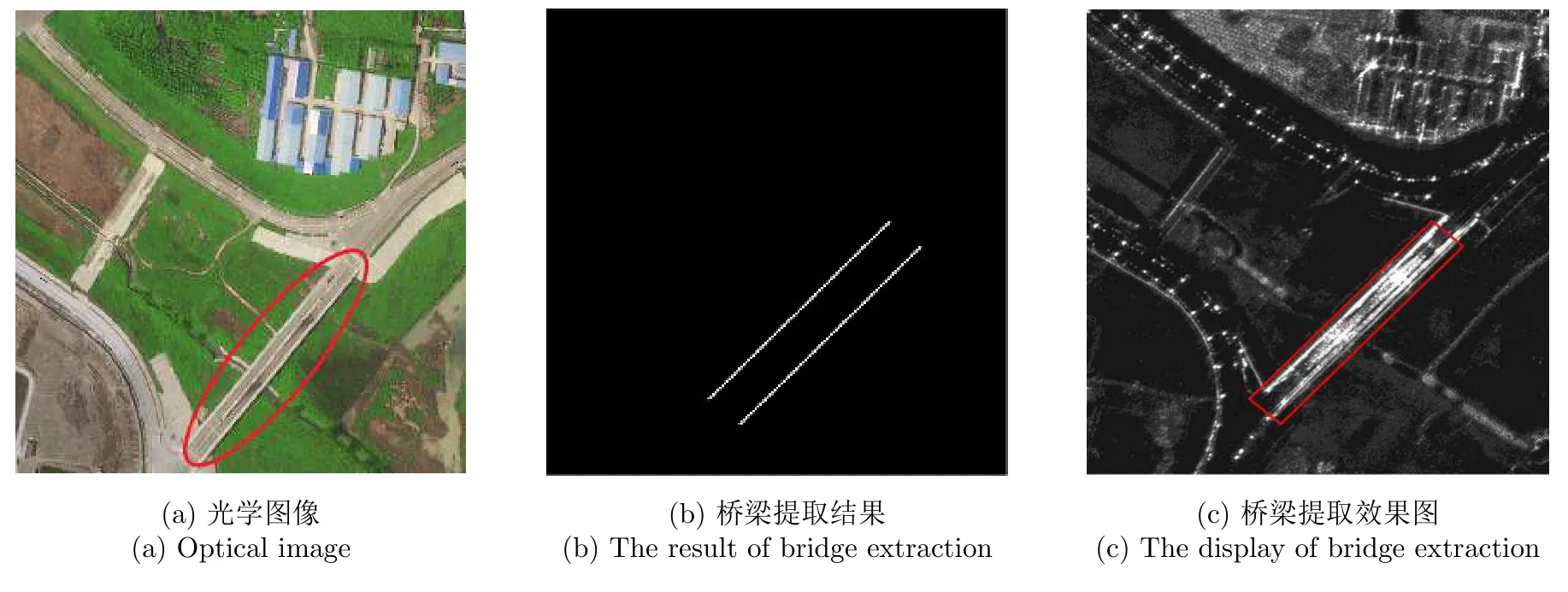
图16 地区1光学图像和桥梁提取结果Fig.16 Optical image and the result of bridge extraction in area1
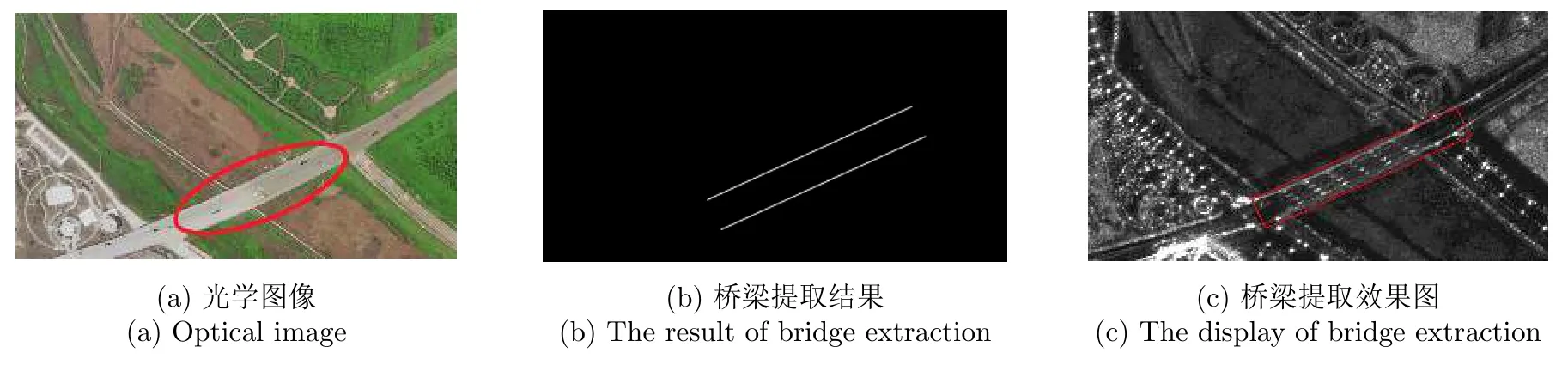
图17 地区2光学图像和桥梁提取结果Fig.17 Optical image and the result of bridge extraction in area2
6 结论
本文提出了一种基于极化CSAR图像的陆上桥梁检测方法。首先,分析了陆上桥梁在全方位向上的散射特征,进而利用不同地物的圆周极化熵差别,实现陆上桥梁与桥梁下陆地背景的分离;其次,根据桥梁和其它地物的极化熵方差特征差异和桥梁的几何形状尺寸特征,有效抑制非桥梁的虚假目标;最后,针对桥梁目标几何特点,通过采用遍历搜索方法,实现桥梁的准确定位。机载L波段极化CSAR实测数据处理结果表明:本文所提方法能够准确地提取陆上桥梁,且具有良好的有效性和实用性。
与已有依赖于水体提取的水上桥梁检测方法相比,本文所提方法利用了极化CSAR全方位成像特点,直接提取桥梁区域,不再依赖于桥下背景的提取,进而避开了传统“若要提取桥梁,需先提取水体”的操作,因此具有更加广泛的适用性。尽管本文所给方法是针对陆上桥梁提出来的,但不难发现,所提方法同样适用于水上桥梁的提取处理。
如今,人们建造的陆上桥梁越来越多,且与水上桥梁相比,陆上桥梁的样式丰富,且风格迥异,而不同样式的陆上桥梁的检测难度也不尽相同。由于所获得的实测数据有限,本文只给出了常规直线陆上桥梁的提取方法及处理结果,所以本文所提方法的适用范围为郊区的直线型高架桥。当把本文所提方法应用于城区高架桥、城区道路上的立交桥等情况更加复杂的陆上桥梁提取时,提取效果还有待验证。未来研究中,我们将努力获取更多的实测数据,同时把所提方法应用于其它更加复杂样式(如曲线)陆上桥梁的提取处理,并针对发现的问题,做进一步的改进与完善,最终实现所有陆上桥梁的高精度提取。
致谢在此衷心感谢提供机载CSAR实测数据的中国电子科技集团第三十八研究所,以及对本文修改提出宝贵意见的审稿专家和编辑同志。
猜你喜欢
民族文汇(2022年23期)2022-06-10
航天电子对抗(2022年2期)2022-05-24
卫星应用(2022年3期)2022-05-23
国际太空(2021年11期)2022-01-19
北京航空航天大学学报(2021年9期)2021-11-02
地理教育(2019年1期)2019-03-06
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
北京心理卫生协会学校心理卫生委员会学术年会论文集(2018年1期)2018-05-10
中国化妆品(2017年12期)2017-06-27