
移动机器人导航的路径规划策略*
2021-07-14 08:33张广帅韦建军刘铨权王春宝毛志贤罗承开
机电工程技术 2021年4期
张广帅,韦建军,刘铨权,王春宝,,3※,王 同,毛志贤,罗承开
(1.广西科技大学机械与交通工程学院,广西柳州 545000;2.深圳市老年医学研究所,广东深圳 518035;3.深圳大学第一附属医院,广东深圳 518035)
0 引言
路径规划指智能机器人能够在自由位形空间中寻找一条无碰撞路径使其从起始位置到达目标位置的运动,即满足一定约束条件的优化问题。智能机器人在娱乐、医疗、采矿、救援、物流等方面得到了广泛的应用,其结构简单,造价成本低,能够自主完成任务。因此,研究智能机器人技术具有重要的意义。
近些年来,随着科学技术和移动智能领域不断发展,智能移动机器人成为当下研究学者讨论热点话题。国内外专家和研究学者在其领域取得了较大的突破,但这类研究综述极少,而最近相关的综述只列举出一些路径规划简要的分析,缺乏国内外最新的研究成果[1-5]。与现有的综述不同,本文从算法的完备性和概率完备性两方面进行分析,重点列举了典型算法的具体原理和最新的研究成果。
本文在阅读当前最新研究成果的基础上,论述算法完备性和概率完备性两大类路径规划方法,列举出各类典型算法的最新进展并概述其优缺点。最后对各类算法现有研究分析和总结,展望未来智能机器人发展的趋势。
1 路径规划算法的描述
1.1 路径定义
路径规划是由智能机器人自身携带的传感器探索环境空间信息、障碍物分配信息等一系列的约束条件作出的行为规划。智能机器人在环境空间中的运动大致按照“任务——感知——建模——规划——执行”的过程依次进行[6],如图1所示。智能机器人运动过程中,安全路径规划(检测障碍和避开障碍)是智能机器人的核心部分。因此,在简单和复杂的环境中实现智能机器人路径规划具有重要意义。

图1 移动机器人运动过程
1.2 路径规划的研究方案
通过对空间离散化处理将智能路径规划方法分为完备性和概率完备性两类[7],如图2所示。完备性是指若在空间中起点位置与目标位置之间有可行路径解存在,那么一定可得路径解;若得不到路径可行解则说明空间不存在解,典型的方法有Voronoi图法、A*、蚂蚁算法等。概率完备性是指若空间中起始位置与目标位置之间有可行解存在,只要搜索足够长的时间一定可以得到可行解,典型的算法有RRT和PRM算法。
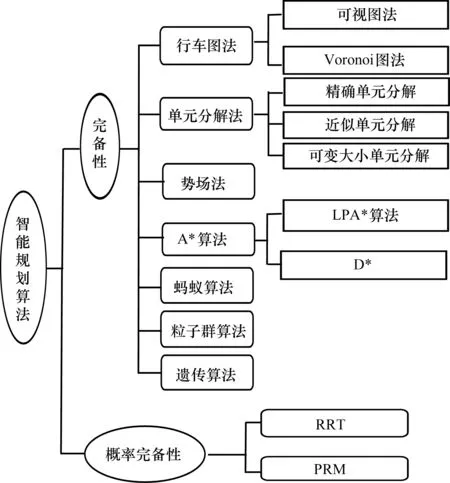
图2 路径规划方案
1.3 性能分析
表1所示为常见路径算法的比较,并分析各类算法的优缺点及适用范围。
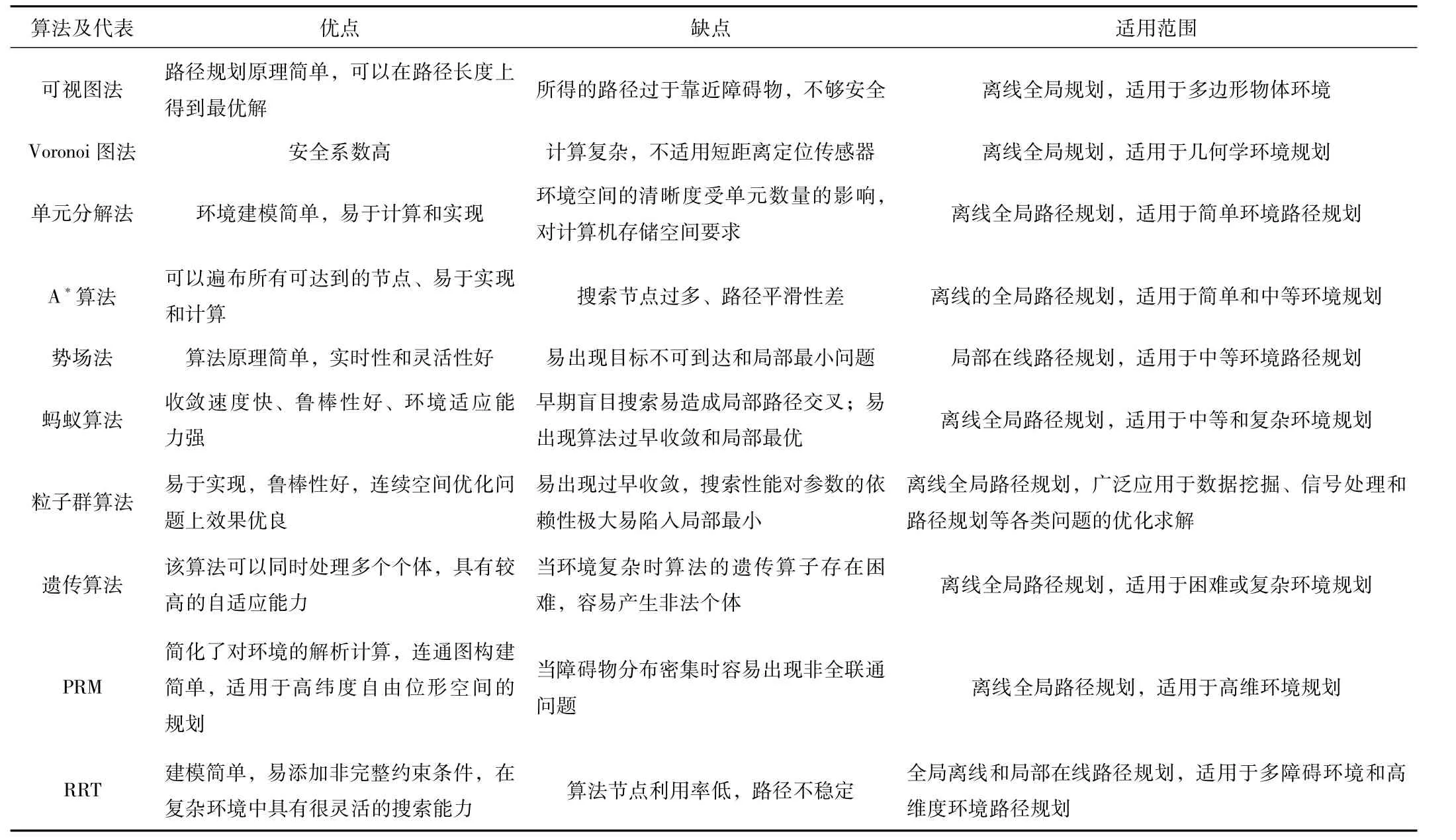
表1 路径算法对比
2 完备性路径规划
2.1 行车图法
行车图法是由障碍物的几何形状进行空间分解,采用一维曲线网格表示环境空间中的连通性,加入起始位置与目标位置后,在一维无向连通图中寻找一条无碰撞路径。可视图法和Voronoi图法是两种典型方法。
可视图法由所有连接可见顶点对的边组成,其初始位置和目标位置也可作为定点,如图3(a)所示。Voronoi图法是可视图法的一种延伸,其规划思想是取障碍物间的中间点,最大化障碍物与机器人之间的距离,如图3(b)所示。
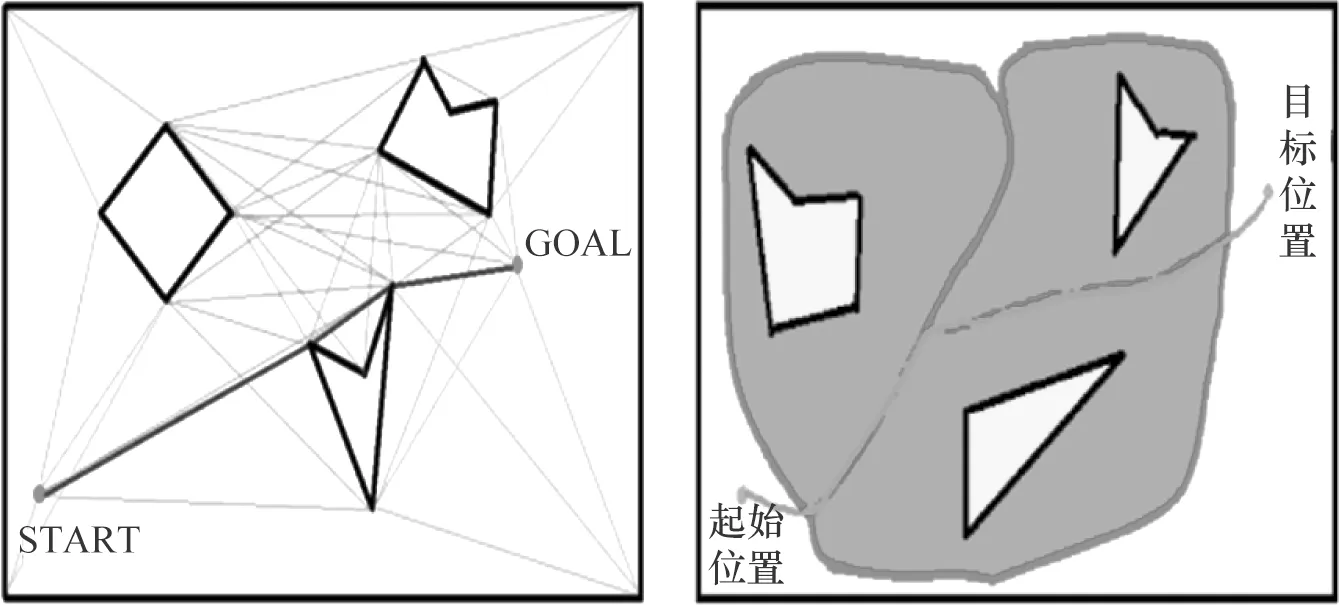
图3 行车图法
可视图法路径规划原理简单,特别适用于描述多边形物体,但该方法所得路径过于靠近障碍物,路径规划的安全系数不高。刘娅[8]提出凹凸点法克服路径的平滑性问题,智能移动机器人运动至障碍物边缘突然方向变化导致能量消耗,该方法通过线段相交线和节点凹凸性判断简化障碍物的环绕、嵌套等复杂变化,提高了路径规划效率,改善了路径平滑性。Bhattacharya P[9]提出尺寸虚拟放大算法,在路径规划过程中将智能机器人结构尺寸虚拟放大,使其减少接触障碍物区域,提高安全系数。许斯军[10]提出采用切线图法对环境空间进行可视图建模,通过目标导向启发函数计算通路路径。采用膨胀算法对各个通路路径进行迭代,减少了智能移动机器人与障碍物的接触区域。
相对于可视图法,Voronoi图法的安全系数高,但存在路径长度缺陷。张景昱[11]提出区域分割Voronoi图法,利用传感器的感知能力对区域进行精准划分,根据区域内障碍物的数量对区域赋予不同权重,利用权重值的大小填补Voronoi图法的覆盖空洞,该算法可以覆盖整个环境空间。Masehian E[12]提出势场法与Voronoi相结合路径规划方法,将障碍物间中间点进行约束处理并作为吸引磁场方向,智能机器人在吸引磁场的作用下自主运动,采用局部路径磁场对路径的平滑性有很大的提高。朱利[13]提出一种基于Voronoi图质心多无人机协同区域算法,通过创建数学模型建立评估指标,针对动态环境变化提出DCPS策略,该策略将V图质心用于引导无人机朝向目标点运动,从而提高搜索效率,提高算法的计算效率。
2.2 单元分解法
1968年,W E Howden首次将单元分解法应用于早期移动机器人发展中,是一种最常见的环境建模方法。单元分解法核心思想是将位形空间划分为若干个小的区域,每个区域作为一个单元,单元之间的相邻关系为边构成一张连通图。单元分解法共有三种典型方法:精确单元分解、近似单元分解和可变大小单元分解。
精确单元划分机器人无需考虑每个单元的具体位置,只需考虑如何从一个单元移动至另一单元即可,如图4(a)所示;近似单元分解需考虑环境的疏密度和物体形状的复杂程度如图4(b)所示;可变大小单元分解是近似单元分解的一种改进方式,将环境空间递归划分为4个大小的子区域,直到每个子区域所包含的基本元素完全被占(用“1”表示)或完全空闲(用“0”表示),如图4(c)所示。

图4 单元分解法
单元分解法计算原理简单,但环境的清晰度与单元数量相关,若单元数量较多时,环境信息较清楚,而此时需要较大的存储空间,规划速度降低;若单元数量较少时,无法描述整个环境信息,精确度难以保证。Zelinsky[14]提出距离变换单元算法,该算法将环境空间构建成一个数值距离结构地图,将当前移动位置单元与未覆盖单元建立关联路径,探索选择所有无障碍路径栅格,由代价函数评估无障碍路径并选取最优路径。于洪斌等[15]提出记忆单元法,采用单元分解法划分环境空间时,对单元节点添加记忆力算法,使两单元节点之间建立一定的内在关系并形成记忆力反馈信息,通过反馈信息最终形成一条最优路径。刘庆周等[16]提出A*栅格法,采用单元分解法建立环境空间模型,通过A*算法评估公式对单元路径节点进行评估,使路径规划更具有倾向性,提高路径规划效率。王文学[17]将单元Morphin
算法应用于城市复杂环境中,Morphin算法设置一组运动基元确定可达状态并构建搜索树,使其可以在同一栅格内建立多个搜索节点,能够很好地处理动态环境的不确定性,提高了路径平滑性。Borenstein等[18]提出栅格向量直方图法,如图5所示。采用近似单元分解法构建环境地图,通过机器人自身配备的传感器检测每个栅格加权值变化,识别所有可以让移动机器人通过的无障碍通道并对每个通道计算移动成本,选择最佳路径。
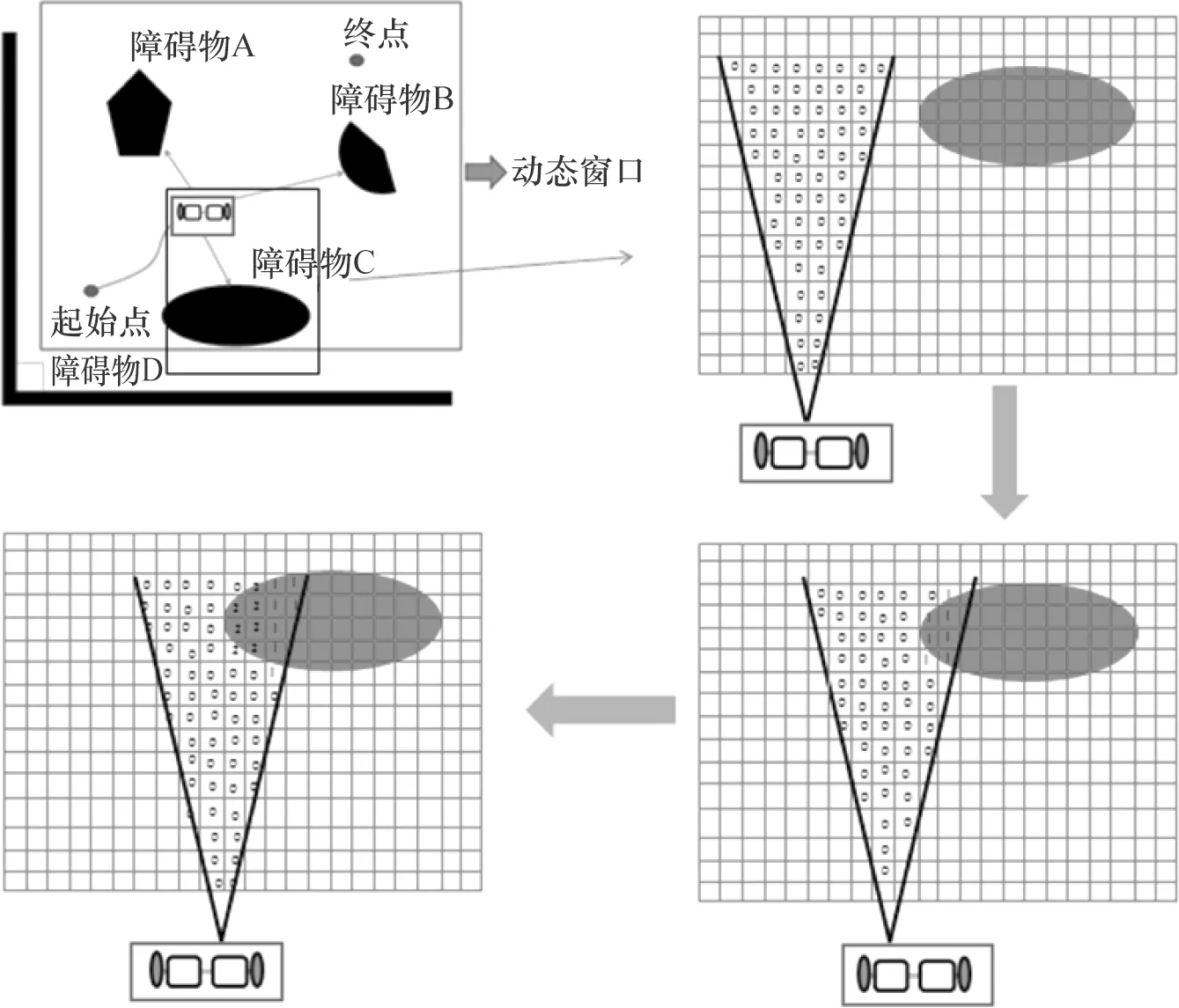
图5 检测加权值
2.3 A*算法
A*算法是基于优先级定义的广度优先搜索算法,由评估函数在连通图中寻找最优路径,如图6所示。A*算法采用代价函数评估节点的质量,算法将代价函数最小值作为下一扩展节点,以此进行叠加直至目标点。

图6 A*算法
A*算法可以遍历所有可到达的节点,易于实现和计算,因此被广泛应用于各种路径规划问题;但A*算法采用曼哈顿距离和欧里几何距离算法存在搜索节点过多、路径平滑性差、只适用静态环境搜索等一系列问题。针对A*只适用于静态路径规划,2004年Koenig和Likhachev提出一种参考人工智能增量搜索LPA*算法将其用于最短路径动态搜索。但此方法只针对起始点和目标点固定的情况。
张浩杰等[19]提出变维度增量启发式(AD*算法)路径规划方法,将移动机器人运动过程中受到几何运动约束区域采用高维状态空间,无影响的区域采用低维状态空间,并引入比例因子ε(ε>1)修正评估函数。实现了算法的增量性和实时性。王维[20]提出一种路径指数加权A*算法,其算法将当前节点的估计值占实际路径值的比重进行分析加权。比重加权值随当前结点距目标节点的不同而进行变化,通过加权值变化给予移动机器人不同运动速度,提高了路径规划效率。赵晓等[21]提出跳点搜索A*算法,采用跳点代替A*算法中openlist和closelist中产生的不必要节点,并在路径拐点处加入自身调整位姿的运动参量,使得路径平滑性和规划速度得到了很大的改善。Peng等[22]提出A*存储数组算法,采用储存数组的方式储存A*数组元素,当使用数组元素中某一元素时可以一次性操作完成对指定数组单元的访问,提高了算法的效率。周苏[23]提出弹性带气泡A*算法。过弹性带的收缩力消除路径中过多的冗余点和松弛力;设置一个气泡阈值Pp,当弹性带收缩至气泡阈值时,局部区域停止收缩,局部路径为最优路径。整个收缩舒张过程中,气泡随着弹性带的伸缩变化进行删除和添加且气泡之间相互重叠,使得整个路径在气泡范围内保证路径无碰撞。
王洪斌[24]提出势场A*算法同时实现静态和动态路径规划,通过A*算法实现初始静态路径寻优规划,当某节点发生改变时采用势场法对其动态路径进行规划。采用势场A*算法实现了静动态的结合,能够很好地处理存在的冗余点、转折次数多问题,使路径达到最优状态。晁永生等[25]提出采用增量式A*算法将路径规划分成两个阶段。第一阶段采用A*算法搜索静态下障碍物信息,第二阶段采用增量式A*算法搜索动态障碍物信息,将两者结合实现局部路径和全局路径规划。Kaplan A[26]提出动态窗口与A*算法结合思想来实现复杂环境的动态路径规划。该算法通过选取多个目标点提高算法效率,并利用目标优先级判定最短路径,采用动态窗口法追击动态目标点,使其能够成功获得移动目标点。
2.4 势场法
势场法基本思想根据路径目标点对移动机器人产生吸引力,障碍物对移动机器人产生排斥力,将吸引力和排斥力的合力构成移动机器人的控制率,如图7所示。
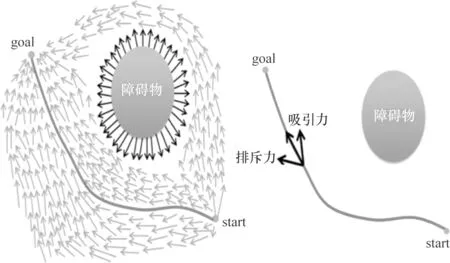
图7 势场法
由势场法可得吸引磁场产生的吸引力随着目标点靠近逐渐减小,到达目标点后吸引力为0;排斥磁场产生的排斥力随着障碍物靠近而增大,当障碍物距离大于预定阈值,排斥力为0。若目标点与障碍物之间距离较近时,易受到吸引磁场和排斥磁场反复作用,容易产生震荡和死锁现象。
丁家如[27]提出增加虚拟子目标势场法,使其与原目标点共同作用解决势场法所存在的局部最小问题。算法增加虚拟目标点后,移动机器人受到虚拟子目标和实际目标联合作用使其吸引力大于排斥力,摆脱局部最小。翟红生[28]提出一种相对速度势场法,结合量子粒子群算法对吸引力势场增益系数Ka和排斥势场增益系数Kr进行一定的修正,使其摆脱局部最小,该算法结构简单、实现了有效避障,提高了规划性能。王萌[29]提出采用附加控制力的势场法,使机器人能够迅速跳出局部最小值。该算法将机器人当前位置与目标点位置间的相对距离关系添加至排斥函数中,实现对原有斥力函数改进。
陈金鑫[30]提出斥力偏转模型势场法,该算法采用调节斥力的指向和自适应调节斥力系数,改变斥力与引力的夹角使其迅速跳出局部极小状态,避免局部最小的同时减少了路径规划的长度。何兆楚[31]提出RRT势场法算法,其算法利用势场法进行局部路径规划,当局部路径出现震荡和死锁现象时,采用RRT(快速扩展树随机算法)自适应选择临时点,使得搜索过程跳出局部震荡和最优状态;当路径跳出局部震荡状态后再切换至势场法,反复进行迭代直至到达目标点。
2.5 蚂蚁算法
蚁群算法是一种基于群体动物觅食的一种智能搜索方法,采用一个蚂蚁的行走路径表示待优化问题的一个可行解,将整个蚂蚁群体所有行走路径作为待优化问题的解空间,用蚂蚁群体收敛选择的路径作为问题的优化解,如图8所示。

图8 蚂蚁搜索示意图
蚂蚁算法在路径规划过程中,问题的解随优化过程同步变化,因此可以适应问题的动态性。但在计算过程中存在计算量大,求解时间较长,而且调整参数依靠经验进行反复调试,不同的环境模式需要适配不同的参数要求,易陷入过早收敛和局部最优。
谢智慧[32]提出比例初始化信息素蚂蚁算法,采用该方法将信息素的初始值按比例减少,即靠近起始点与目标点连线附近信息素初始值取值大,而偏远区域的初始值较小,避免蚂蚁算法盲目搜索和局部路径交叉问题,提高算法初期搜索效率。徐梁等[33]提出限制信息素取值蚂蚁算法,通过限制蚁群信息素的取值范围,扩大搜索空间,从而避免了算法过早收敛,同时还提出自适应调节信息挥发系数ρ提高算法的全局性和算法的收敛速度。刘国宝[34]引入精英蚂蚁策略算法,每次迭代完成后,只求解结果中排名较前的几个精英蚂蚁用于信息的更新,将精英蚂蚁所行走路径按照代价函数排序并赋予不同的权重值,实现了全局最优基础上局部最优。Jiao Z[35]提出一种零点定理不均匀分配初始信息素的蚁群算法,不同位置的栅格赋予不同的初始信息素,靠近目标点的栅格信息素浓度高,引导蚂蚁朝向目标点探索,减少路径盲目搜索,提高全局寻优能力和搜索效率。屈鸿等[36]提出调整转移概率蚁群算法,该方法引入随机选择机制以增加解的多样性,排除障碍节点和已留信息素节点;引入惩罚函数对死锁边上的信息素进行惩罚解决蚂蚁算法所存在的死锁问题并提高了全局避障能力。
刘建华等[37]提出势场蚁群算法,将吸引力和排斥力的合力作为一群信息素的扩散方向,使得蚁群算法的搜索方向具有倾向性。黄辰[38]提出在一种基于动态反馈式A*蚁群算法。采用简化A*算法优化蚁群算法减少初期搜索的盲目性,加快蚁群算法初期的搜索效率;采用闭环反馈思想实现算法提高路径的适应能力,提高了路径搜索效率,解决了算法的局部最小和死锁现象。
2.6 粒子群算法
1995年由Eberhart博士和Kennedy博士提出粒子群算法,其思想来源是受到自然界中群居生物迁徙或觅食时所表现出的社会行为。粒子群算法将优化问题的解看作一个在自由搜索空间中的鸟,通过鸟类飞行不断调节自身所在的位置来找到食物的源头。
粒子群算法被提出后广泛应用于数据挖掘、信号处理和路径规划等各类问题的优化求解。算法易于实现、收敛速度快、优化效率高和鲁棒性好。但算法也存在易陷入局部最优和收敛速度慢的缺陷。
当前对于粒子群算法的研究主要针对粒子的运动轨迹和算法的收敛性的分析。魏勇[39]将差分进化算法引入至粒子群算法中,当算法在规划过程中出现停滞时,引入差分进化算法动态调整变异概率和缩放因子增加种群算法的多样性,扩大算法的搜索范围,该方法并讨论了随机性对粒子运动轨迹的影响。Dantzig[40]提出量子粒子群算法,采用量子粒子群算法对初始粒子进行交叉操作提高算法的全局寻优能力,通过粒子的变异操作提高局部寻优能力。梁静[41]交叉策略的动态多组群粒子群优化算法,该算法将整个种群分成多个小的种群,分别在小种群之间进行寻优求解,采用迭代的方法将小种群内的最优解进行叠加,寻找全局最优解。刘艳红[42]提出指数权重粒子群算法,采用MAKLINK建立自由空间模型,采用Dijkstra算法搜索无碰撞路径,将其权重加入粒子群算法中,取最短路径。该算法与其他改进粒子算法不同,该算法并不是向最优粒子进行学习,而是选择粒子适应度的平均值学习,该改进算法避免了局部最优,提高了粒子的多样性。
Poli[43]在进行速度更新的基础上添加了有界随机扰动变量和临近粒子信息,该方法能够通过对粒子的速度更新引入变异机制保持粒子寻优的多样性,防止算法收敛过早。Fernande[44]通过分析粒子群算法将其看做一个随机阻尼弹簧系统,建立动态方程分析其稳定性和局部收敛性,提出多目标粒子群算法,引入环境适应因子和配对选择机制选择个体最优和全局最优增强算法的局部最优和全局最优搜索能力。Soleimani[45]提出一种惯性权重随机取值的粒子群算法减少其影响程度,通过随机取值保持了粒子群的多样性,并在迭代过程中动态调节学习因子避免算法过早收敛。
2.7 遗传算法
20世纪70年代,美国密歇根大学J Holland教授首次提出遗传算法,遗传算法是根据大自然生物进化规律而设计提出,针对自然选择和遗传时发生的交叉和变异设计生物进化过程的计算模型,并融合优胜劣汰自然准则选择每一代的候选解,最终从候选解中搜索最优解,遗传算法的构建图如9所示。

图9 遗传算法
遗传算法实现方式简单,受外界的影响较小,可以发挥自身的迭代的优势,可以与其他算法融合使用,具有很好的自组织性和学习性;但该方法运算过程中一些后续不需要的种群给计算提升难度使得计算效率不高、搜索效率低,收敛速度慢,易陷入局部最优解。
MONTIEL[46]提出遗传算法在选择操作中引入模拟退火法增加种群多样性,提高路径寻优能力,并结合交叉、变异算子自调整策略,使得种群个体之间存在较大的差异。该算法不仅提高了收敛速度,而且可以使算法跳出局部最优。武小年[47]提出遗传算法与蚁群算法结合的路径规划算法。通过改变遗传算法中种群初始化因子使得节点搜索时更趋向于目标路径,提高初始种群的规划效率,对变异过程中变异节点进行限制,避免产生路径不连续。余文曌[48]在无人艇规划过程中在遗传算法上添加弹性网格概念。通过动态变换调整网格局部密度,设计自适应变异概率,根据路径网格的离散程度自适应调整大小,提高各代路径的多样化。该算法减小了搜索空间,提高了路径算法的多样性。
胡尔兵[49]在遗传算法的基础上提出了余弦自适度函数,在进化前期交叉概率和变异概率较大,防止算法发生早熟收敛现象,在进化后期要求较低的交叉概率和变异概率,以避免最优个体的丢失。
3 概率完备路径规划
3.1 PRM算法(Probabilistic roadmap)
20世纪90年代初期,M H Over-mars提出PRM算法,PRM算法基本思想是通过随机采样和碰撞检测找到位形空间中的路径点和无碰路径,如图10所示。首先对环境空间进行采点,连接环境空间中相邻的节点并删除节点连线之间有障碍的路径,加入起始点和终止点,从连通图中寻找一条从起始点到终止点最优的路径。
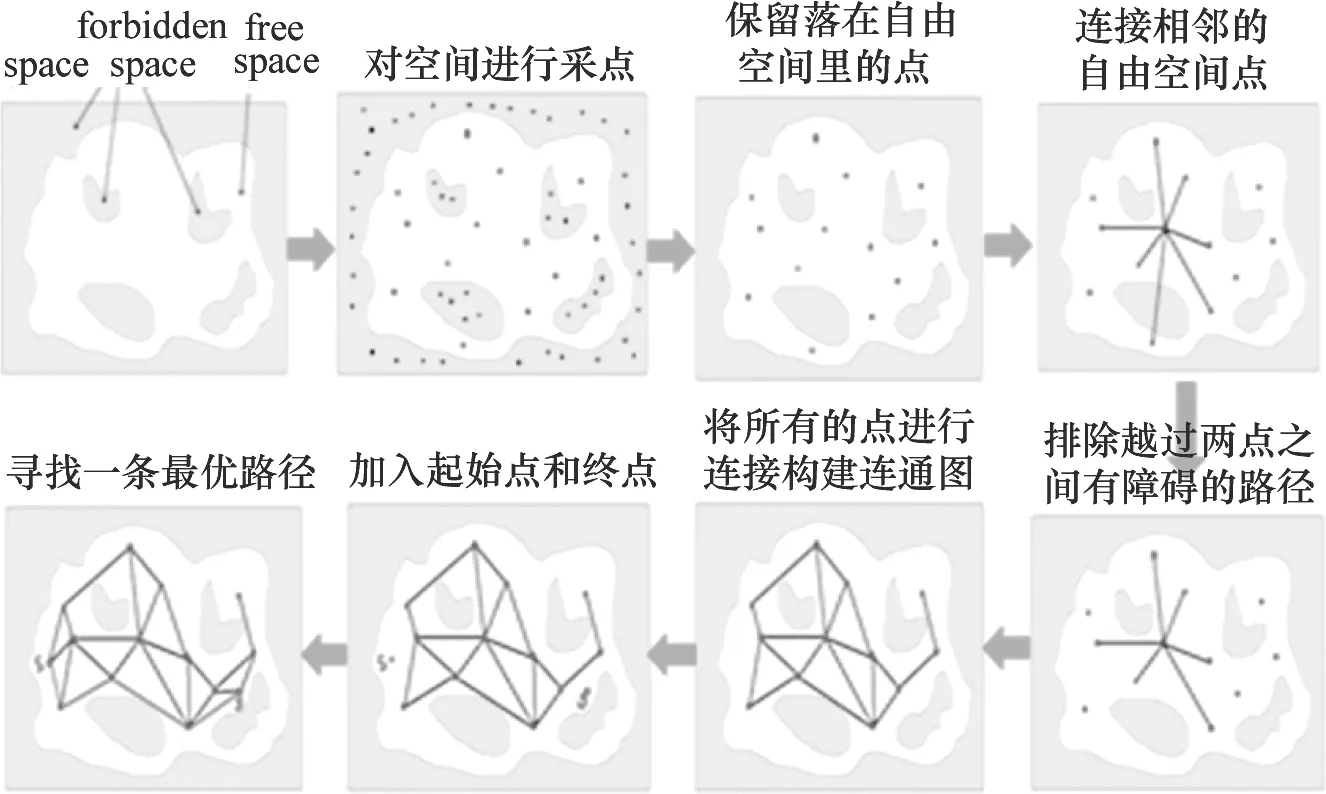
图10 PRM连通
PRM算法简化了对环境的解析计算,可以快速构建得到连通图,而且适用于高纬度自由位形空间的规划,是一个近似完备的路径规划方法,但PRM采用均匀采样策略,当环境空间处于相对较窄的通道时,均匀采点落在无障碍通道的采样点较少,使其无法连接两侧的子图,对算法的连通性产生了一定的影响。
谭建豪[50]提出一种障碍物边界采样点的PRM算法,该算法提取障碍物的边界点并将其作为确定采样点,基于自由位形空间的采样点与障碍物边界采样点建立最优可行区域以解决PRM算法采样点全局分散问题,提高了路径规划效率。李敏[51]提出一种基于距离变换PRM路径规划算法。该算法采用PRM算法在自由位形空间中采点,使用距离变换对空间中的点赋值(其值为该点与障碍物的距离),从而构成距离变换地图。通过距离变换地图平均值反映障碍物在空间中的稠密程度并确定环境空间中采样点的个数。由距离变换值判断不同的区域障碍物分布情况分别采用不同的采样点策略,使得窄通道采样点较密集,宽通道采样点稀疏。刘洋[52]提出在势场PRM算法,传统PRM算法在采样姿态进行膨胀检测时,落在障碍物上的采样点舍弃,而改进后算法将障碍物看做一个排斥磁场,当采样点落在障碍物空间内时,采样点受到斥力作用使其向自由空间运动,直至将采样点完全排斥出障碍物,从而增加窄通道空间采样点数目,实现最优路径联通。采用排斥磁场易造成取样点不均匀和路径偏离现象。
魏念巍[53]提出一种改进PRM算法,采用Douglas-Peucker算法对PRM初始路径关键采样点提取,使用关键节点代替路径中的初始空间采样点,减少环境空间采样点的个数。采用Clothoid曲线对路径进行平滑性处理,使其从起始点至目标点路径拐点个数少,路径更平滑。LUO C[54]采用神经网络PRM算法,通过神经网络活动产生的活性值加快相邻采样点路径的创建,使其路径规划效率有了很大程度的提高,并采用二分法判断是否在占该区域内,若在障碍区域内路径删除,若不在占该区域内则保留,实现最优路径规划。提高了路径规划的效率,减少了规划的时间。
3.2 RRT算法(Rapidly-Exploring Random Tree)
1998年美国爱荷华州立大学Steven M.lavalle提出基于节点采样的快速扩展随机树(Rapidly-Exploring Random Tree,RRT)算法。RRT算法的基本思想采用树形式的连通图方法,其扩展过程如图11所示,以起始点Q(init)为树的根节点建立搜索树,在状态空间中随机采样某一状态用于引导搜索树的扩张,此状态称为Q(rand),在已建立的搜索树查找与Q(rand)距离最接近的点Q(near),以Q(near)和Q(rand)建立一个新的输入u,以当前Q(near)作为输入状态x,根据系统方程x=f(x,u)得到下一个状态Q(new),对Q(new)进行无碰撞检测,如果检测无冲突,则将Q(new)加入至搜索树中,实现整个扩张过程。

图11 RRT算法
基于节点采样的RRT算法建模简单,容易添加非完整约束条件,在复杂环境中具有很灵活的搜索能力,但算法存在节点利用率低,路径不稳定等因素影响。
杨也[55]提出了势场RRT算法,其算法通过增加引力分量的形式引导随机树朝向目标方向生长,使得RRT算法生长方向具有目标偏向性,减少随机树搜索的随机性。肖支才[56]提出一种基于循环寻优的RRT算法。该算法在RRT算法的基础上引入了长度代价约束,对扩展树的生长进行约束,通过长度代价函数可以有效去除RRT树无用搜索路径,反复进行迭代后得到全局最优路径。该算法提高了节点的利用率、加快路径规划效率。KalisiakM[57]等提出RRT-blossom算法,该算法采用回归约束函数控制随机树生长节点,降低随机树在搜索前期重复路径搜索的可能,约束函数将被约束的点设为休眠点,若随机数扩展未能发现目标点,则对休眠点小范围的搜索,保证全局概率完整性,增加了对未知空间的探索。徐娜[58]提出目标偏向策略算法,即在路径搜索前设定一个目标偏向概率阈值Pp,目标偏向概率阈值Pp控制随机树生长的偏向性,减少采样过程的目标计算量,灵活改变采样区域的大小,目标的搜索性强,使得偏向概率阈值Pp控制下获得最佳路径规划。
Cheng[59]提出扩展函数训练环境模型RRT算法,该方法根据不同环境标准设定环境训练模型,其距离障碍物远的点约束条件少,扩展树的扩展概率大;而距离障碍物近的点约束条件多,被删除的概率大。通过随机树多次路径搜索后,使其路径节点之间建立一定内在关系,从而提高路径搜索效率和路径规划质量。文献[60]提出双向RRT算法,该算法在起始点和目标点同时生成两颗RRT树,以终点和起点作为RRT树的初始点进行相向搜索,直到两棵扩展树叶子互相连接,搜索过程中通过评估函数选择最优路径,该算法提高了搜索速度,节约搜索时间。
4 算法概括
表2所示为以上算法特征和优缺点的归纳总结。

表2 改进算法的特征及优缺点

续表2
5 移动机器人展望
当前,路径规划技术已经取得了显著的成果,但在具体实施路径规划方法过程中发现了其存在的局限性。如蚂蚁算法参数调试需要长期人工经验和收敛过早等问题、PRM空间随机采点不均匀等一系列问题。因此,根据研究学者当前的研究和未来的发展趋势,目前移动机器人技术研究主要集中在以下几个方面。
5.1 更高智能化
随着科学技术的发展,智能机器人有着越来越广阔的发展前景,更智能化是机器人发展的必然趋势。机器人能够融合传感器采集信息、处理信息、加强对未知环境空间探索,以调整运动状态迅速到达目标点,对环境变化适应能力强,能够在愈加复杂的环境中完成复杂任务的能力。因此,研究更高水平的智能化机器人是未来机器人技术发展的一个趋势。
5.2 更优化路径方案
如今,智能机器人技术被广泛应用于多个领域,机器人领域学者们一直致力于研究更好的路径规划方案满足移动机器人自身约束条件。但运动过程中,智能机器人受到速度、加速度和自身运动条件的限制等各方面因素的影响,使其运动轨迹受到一定程度的影响。因此研究一种路径优化方案使其路径节点数量少、路径转折点少、运动轨迹平滑、连续性好等特点满足非完整机器人运动约束条件具有重要意义。
5.3 新路径算法的研究
单一路径规划方法总是存在的一定的缺陷,使其实际运动过程中存在一定的局限性。因此,将不同算法之间优势互补,形成一种新的算法体系,实现机器人领域突破性进展。例如,RRT算法与势场法、A*算法与蚂蚁算法等一些算法的结合。另外,智能机器人是一种跨领域的学科,因此引入其他学科的研究也是未来发展的一个方向。
5.4 多机器人协作
随着智能机器人工作环境改变,单机器人作业在大部分情况不能满足任务工作的需求,因此多机器人协作是机器人领域未来发展的必然趋势。单智能机器人自身安装的传感器和通信设备往往有一定的精度和范围,只由单一的通信设备难以保证环境空间的完整性和可靠性,因此采用多机器人相互协作共同完成任务,既可以发挥单个机器人的特点,又能通过多机器人之间通信描述环境信息的完整性,并能够快速分析实时环境信息并获取可靠结果。因此,如何建立多移动机器人之间的信息联系、分析如何灵活多变且高效地完成工作成为了研究学者需要探索的问题。
6 结束语
路径规划技术是智能移动机器人领域的一个重要分支,采用良好的路径规划方法可以提高效率,节约时间,减少人力物力的投入。本文从完备性和概率完备两部分展开详细的介绍,分析机器人领域研究学者如何采用最优的路径规划方法来实现高效、最优、低成本的路径规划方案。并对智能机器人未来发展趋势进行探究和展望,对当前机器人技术的研究和发展具有一定的参考价值。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年4期)2021-11-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
成都信息工程大学学报(2019年3期)2019-09-25
测控技术(2018年9期)2018-11-25
制造技术与机床(2017年3期)2017-06-23
系统工程与电子技术(2016年4期)2016-08-24
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
