多功能护理床的结构设计和研究
2021-07-16 09:24韦国强骆敏舟朱爱洁
科学技术创新 2021年20期
韦国强 骆敏舟 朱爱洁
(苏州诺研智能科技有限公司,江苏常熟 215500)
伴随着我国经济的高速发展,人民生活水平的显著提高,人们将目光聚焦于智能护理床,以期解决生活无法自理的老年人、因疾病导致行动不便的病人和残疾人等的基本护理问题,减轻医护人员以及病患家属的护理压力。
护理床行业起步于欧美等发达国家,他们掌控着护理床的核心技术,致力于产品功能的升级完善。新加坡理工学院的K.S.Jaichandara 等人设计了一种基于FPGA 的在临床环境中预防褥疮产生的智能低成本护理床,在床面温度超过预定的阈值后会报警提示护理人员帮助患者翻身,能够有效减少褥疮的形成。我国的护理床产业与发达国家相比仍处于相对落后的地位,多数研究停留在理论设计或逆向开发阶段,津理工大学李锋等人设计了一种可实现床椅转换功能的护理床,并通过仿真实验检验了设计成果,取得了不错的成效。
现有的护理床产品没有能很好地解决行动不便患者在床上的大小便问题,相关研究停留在了理论验证阶段,而这一功能是最需要的。因此,本文主要开发出可以完成起背、曲腿、侧翻身等床体运动,符合中国国情的护理床产品。
1 总体设计方案
1.1 设计原则
目的是为生活无法自理的老年人、因疾病导致行动不便的病人和残疾人等提供护理床产品服务,考虑到用户群体的特殊性,在进行产品设计时应遵循人化原则、物化原则和环境原则,使得护理床产品的性能更加人性化。
1.2 护理床床体尺寸
依据《中华人民共和国行业标准:病床》(YY0003-1990)的相关标准,本文的设计以《中华人民共和国国家标准:中国成年人人体尺寸》(GB10000-1988)中第5 百分位和第95 百分位的统计数据作参考来拟定床体的总体尺寸和各床板的尺寸。本文护理床的外形尺寸为:长×宽×高=2000mm×950mm×500mm。床板是护理床完成各功能的直接执行件,需承载使用者的体重。为了实现设计功能,本课题中床面床板共分为11 块,分别为背板、臀部板、大腿板、小腿板和便孔床板,可分为X 和Y 两个方向来确定其尺寸(X 向尺寸主要参考坐姿人体尺寸,Y 向尺寸依据侧翻身轴线确定)。
综上,护理床的床板尺寸规格如图1 所示。
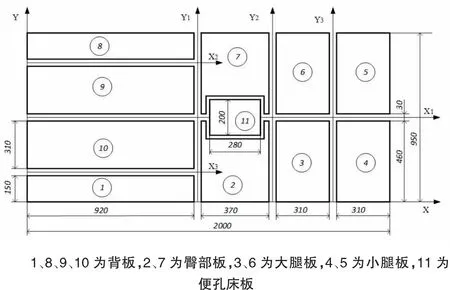
图1 护理床床板尺寸图
1.3 承载能力参数
按照《医用电气设备第二部分:医院电动床安全专用要求》(YY0517-2013)规定,医院电动床的安全工作载荷应在1700N以上,且在标准中提供了载荷在各床板上的分布比例,如图2 所示。取计算载荷1800N(包含床板等在内的所有附件)为后续设计、仿真、分析校核等的计算参考值。
1.4 功能实现参数
研究结果表明人纯粹为了放松身心时休闲椅与水平面间的最佳角度为72°-75°,结合护理床相关标准确定起背角度在0°-75°可调;上下曲腿可达到辅助康复训练的目的,其数值可参考现有康复理疗床的参数确定,本设计中取为-75°-30°可调,负值表示下曲腿;左右侧翻身能有效减少褥疮的发生,为了达到辅助翻身效果的同时又不至于对患者造成挤压、滚落等伤害,本文取侧翻身0°-45°可调。
1.5 护理床的驱动方式和控制策略
本文护理床设计中选择的是电机驱动,在考虑到成本和使用的安全性以及床下空间的限制,最终选择的是DC24 电动推杆作为床体驱动部件(永磁直流同步电动机)。护理床位姿调整功能中需要的是24V 电源,控制6 个电动推杆独自或联合动作。
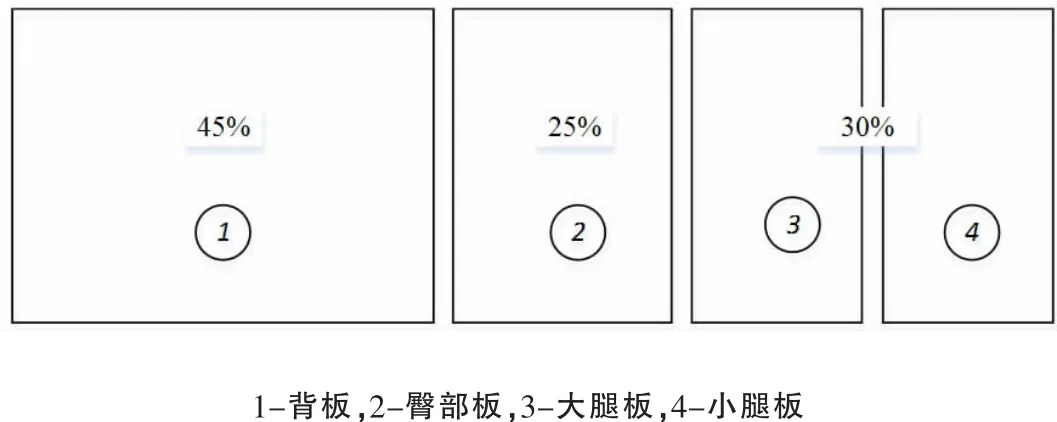
图2 护理床床板尺寸图
2 护理床机械结构设计
护理床床体需要实现患者位姿调整功能,据此将其分为床架、起背、曲腿和侧翻身四个分模块进行独立设计。护理床的框架结构使得在进行位姿转换时床板的运动范围较大,因此在进行此类运动机构设计时应以具有大尺寸导引特点的连杆机构作基本构型进行设计。
2.1 起背运动机构
起背运动主要是实现坐姿或倚靠功能,帮助患者放松,方便进行饮食、阅读等动作。
原动件为电动推杆4-5,执行件是床板1,电动推杆的伸缩杆4 带动弯杆3 绕机架转动,推动滚轮2 沿背板1 运动,进而带动背板1 绕机架转动,完成起背动作。起背运动机构示意如图3所示。
2018年5月28日每个小区于对角线处选择3个点,每个点选择有代表性的0.1 m2,调查有效穗数(剔除5粒以下的小穗),折算成1 hm2有效穗数;样点内从根部随机取20个麦穗(剔除5粒以下的小穗),调查穗粒数,计算每穗粒数,千粒质量按该品种常年千粒质量(39.3 g)计算,产量计算公式如下:

图3 起背运动机构示意图
以原动件电动推杆与床架的铰接中心为原点,护理床长度方向为X 轴,高度方向为Y 轴,建立如图4 所示的起背机构运动模型。

图4 起背运动机构运动模型
OAB 的封闭矢量方程式为
2.2 曲腿运动机构
曲腿运动能协助患者腿部进行康复训练,防止肌肉萎缩,方便护理人员对患者进行简单下肢清洁。
该机构原动件为电动推杆5-6,有一个自由度,运动轨迹确定。为方便侧翻身的进行,本文腿部板采用的是双层结构,图5为下层运动单元。电动推杆的伸缩杆5 动作可带动四边形机构1-3-4-1 绕机架转动,同时带动后侧小腿板驱动框2 绕铰链转动,且上平面始终保持与地面平行。曲腿运动机构示意如图5所示。

图5 曲腿运动机构示意图
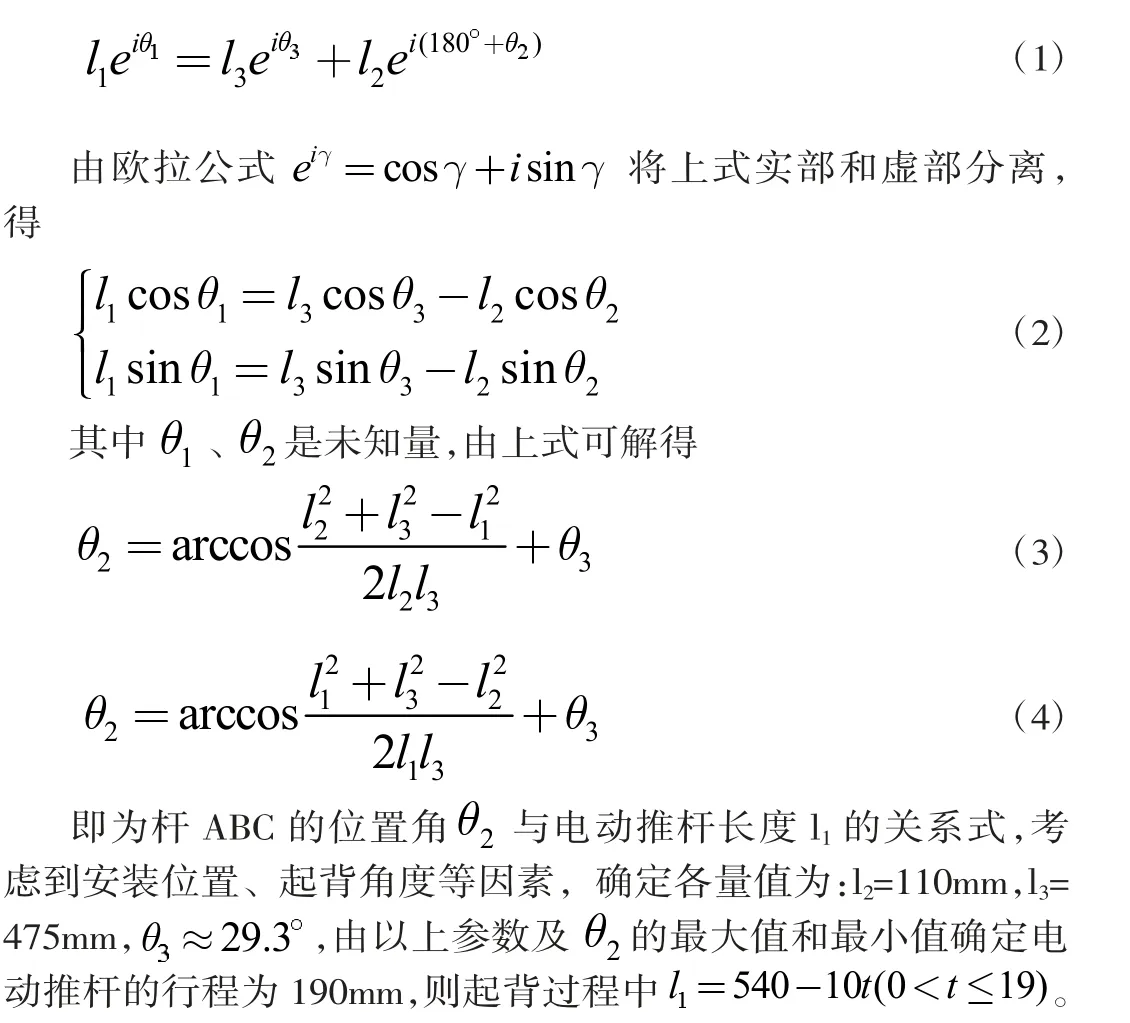
根据选定的曲腿运动机构,以原动件电动推杆与床架的铰接中心为原点,智能护理床长度方向为X 轴,高度方向为Y 轴,建立如图6 所示的曲腿机构运动模型。
图中OA 表示曲腿电动推杆,A、B、C、D、E、O 均为各构件连接铰链的中心点。设某一时刻电动推杆中轴线与水平面间的夹角为θ1,其余各尺寸和角度参数如图中标注所示,其封闭矢量方程式为

由欧拉公式将上式实部和虚部分离并解方程可得:


图6 曲腿运动机构运动模型
2.3 侧翻身运动机构
侧翻身能够方便护理人员对患者进行身体清洁、换衣等护理操作,减轻长时间卧床带来的疲惫感,同时能有效减少使用者褥疮、皮肤溃烂等病情的发生。
原动件为推杆7-8,运动轨迹一定。该机构的连杆3 和4 的一端与床板通过铰链连接,另一端可与滑块分离。滑块沿杆件6左右滑动时能通过连杆3 或4 带动床板1 或2 绕机架转动,实现侧翻身。侧翻身运动机构示意如图7 所示。

图7 侧翻身运动机构示意图
根据上述选定的侧翻身运动机构,以原动件电动推杆与床架的铰接中心为原点,智能护理床长度方向为X 轴,高度方向为Y 轴,建立如图8 所示的运动模型。
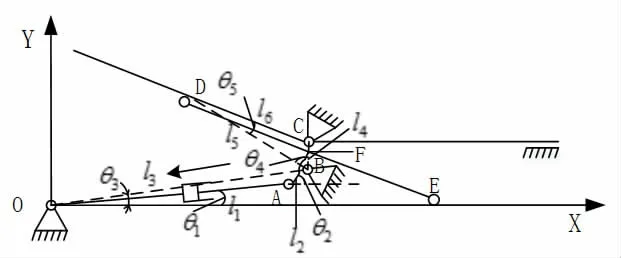
图8 侧翻身运动机构运动模型
图8 中OA 表示侧翻身电动推杆,A、B、C、O 均为铰链中心点,D 为床板与侧翻杆的交点,F 点为侧翻杆内部AB 与DE 的交点。设某一时刻电动推杆中轴线与水平面间的夹角为 θ1,其余各尺寸和角度参数如图8 中标注所示。该机构的运动学求解与起背机构类似,不同点是各构件的尺寸参数不同,求解过程不再赘述。
由OABO 的封闭矢量方程可求得

3 有限元分析
床架是整个护理床系统的支撑件,也是各功能运动机构的支撑基体,在任何静止位姿状态下或位姿转换的运动过程中,各功能模块的最终受力都会传递到床架上,必须保证床架结构的稳定性和安全性,因此有必要对床架进行有限元分析。当上曲腿动作和起背动作同时发生时,患者体重及所有附件重量都只会通过臀部板作用于床架上床框的外沿梁上,该状态下力的作用面积最小,选择此状态作为床架静力学分析对象。
在进行分析前需对模型进行简化处理:在本文中忽略焊接影响,将其当成一个整体零件处理;去除圆角、倒角等对结构性能影响很小的建模特征。对处理后的模型各部件间添加螺栓虚接头组成床架装配体,添加零部件材料为Q235B,在床架下床框脚轮安装处添加固定约束,在上床框的制定区域施加均布力F1(约为1800N),下床框的限定区域施加均布力F2(坐便器集成系统重量,约为150N),调整网格密度,采用标准网格形式进行网格化处理,划分单元数为64996 个,节点数为115667 个,最后得到床架应力分布图和床架位移变形图,如图9 和图10 所示。
经分析计算得到如图9 所示的床架应力分布图和图10 所示的床架位移变形图。从图中可看出,床架的最大的应力值为48.9MPa,出现在床腿与上床框的连接处;最大的变形为0.41mm,出现在床腿较少一侧的上床框侧沿中间部位。与Q235B 材料的机械性能参数进行对比可知,其最大应力值小于材料屈服强度,且有较大的强度冗余,强度满足设计要求;将床架简化为梁结构估算变形最大的上床框侧沿的许用挠度约为4mm,仿真结果远小于该值,刚度满足设计要求。图中变形放大倍数为317 倍。
4 结论
确定了各位姿调整功能模块的机构构型,分别建立了起背机构、曲腿机构和侧翻身机构的运动学模型,并用解析法完成了运动学分析。根据仿真结果,对护理床床架机构受力状况最恶劣的状态进行了有限元分析,得到了结构的应力分布云图和位移变形图,将分析结果与材料Q235B 的机械性能作了对比,验证了结构强度和刚度满足使用要求,保证了结构的安全性。

图9 床架应力分布图

图10 床架位移变形图
猜你喜欢
宝钢技术(2022年4期)2022-12-23
中国应急管理科学(2022年1期)2022-04-18
文萃报·周五版(2021年46期)2021-12-16
闽江学院学报(2021年5期)2021-11-19
小读者(2021年2期)2021-03-29
天津护理(2020年6期)2021-01-23
兵器装备工程学报(2020年12期)2021-01-12
汽车观察(2018年10期)2018-11-06
车迷(2017年10期)2018-01-18
北京汽车(2017年3期)2017-10-14