
无速度传感器调速系统控制策略
2021-07-22 07:07李锴赵修瑞
电子测试 2021年12期
李锴,赵修瑞
(黑龙江科技大学研究生学院,黑龙江哈尔滨,150000)
0 引言
在目前的交流调速系统中,光电脉冲编码器或测速发电机多被用于进行速度测量。但是高精度的速度传感器不仅价格昂贵,而且还存在使系统易受环境影响、降低系统的机械可靠性等缺陷。因此为了克服安装传统速度传感器的不足,无速度传感器技术必然将成为一种主流的趋势,无速度传感器的控制系统不仅节省了设备,而且避免速度传感器使用可能带来的误差。针对无速度传感器系统动态控制性能方面的优势,采用模型参考自适应法来设计速度观测器,并通过MATLAB/Simulink 仿真工具无速度传感器转速辨识问题以及磁链观测问题进行了研究。
1 电机调速控制系统
用一种基于电压模型具有限幅补偿功能的新型定子磁链观测器,去解决传统磁链观测器在低速时辨识精度低的问题。采用低通滤波器作为纯积分器的替代,可以解决直流偏置所造成的误差累积问题。采用低通滤波器的磁链观测模型可表示为:

(1)式中,ψs(s)、e( s)分别为定子磁链、反电动势的拉普拉斯变换,ωc为截至频率。
倘若其输入信号为正弦信号Aωsinωt,且信号初始值为0,并拉普拉斯反变换可以得到:

并采用具有限定补偿环节的磁链观测器,如图1-1所示。由于采用了两次坐标变换,因此磁链的相位并没有发生改变;同时由于加入了磁链幅值补偿环节,也避免了幅值衰减问题的出现。当电机在高速运行时,ω远大于ωc,ωc可以忽略不计。此时补偿增益约等于0,磁链观测器等同于一阶低通滤波器。由此可见,具有限定补偿环节的磁链观测器无论在低速段还是在高速段,都能够精确的观测定子磁链[7]。
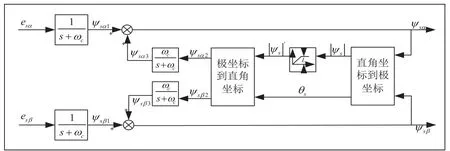
图1 具有限定补偿环节的磁链观测器
1.1 模型参考自适应法
模型参考自适应法辨识速度的主要思想是,对同一控制对象,将不含未知参数的数学模型作为参考模型,而将含有待估算参数的数学模型作为可调节模型,两个模型应该具有相同物理意义的输出量。本设计选用不含转速信息的电压模型作为参考模型,含有转速信息的电流模型作为可调模型,比例积分作为自适应规律,以此建立并联结构的模型参考自适应系统。
2 仿真结果与分析
设置电机初始转速为1400r/min,在0.5S时转速由1400r/min突变为200r/min;设置电机给定启动转矩初始值为10N⋅m,在0.3S时突加60N⋅m负载,则磁链波形如图2所示。
从图2中可以看到该异步电动机直接转矩控制系统的定子磁链波形接近于圆形。说明本文设计的具有幅值限定补偿功能的定子磁链观测器观测精度较高。
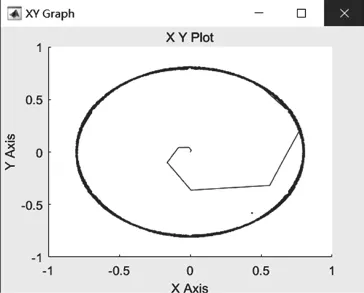
图2 定子磁链运动轨迹
三相定子电流如图3所示。三相定子电流波形虽然在电机刚启动时有着较大的波动,但是也在0.25s内稳定了下来,由此可以看出系统响应速度很快。在约0.15s时刻,电机速度达到给定值,此时三相定子电流也突变到另一个值,并且很快稳定;0.3s时刻,给定转矩从10N⋅m突变到60N⋅m,三相定子电流突变到另一个值,同样也很快地稳定;到0.5s时刻,给定转速从1400r/min突变到400r/min,三相定子电流再次突变到另一个值,经过约0.08s后,稳定下来。
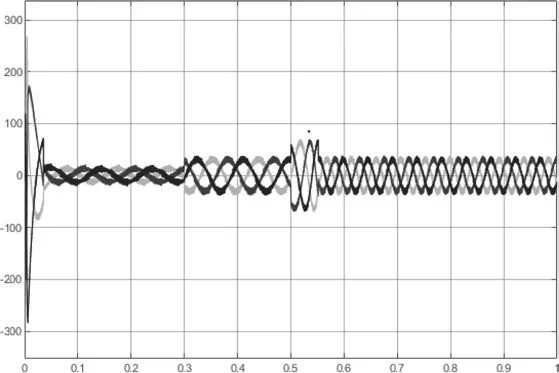
图3 三相定子电流
电机实际转矩转矩估计值的波形图如图4所示。由上图可以看出转矩估计值与电机实际转矩几乎无差别,检验了仿真的准确性。
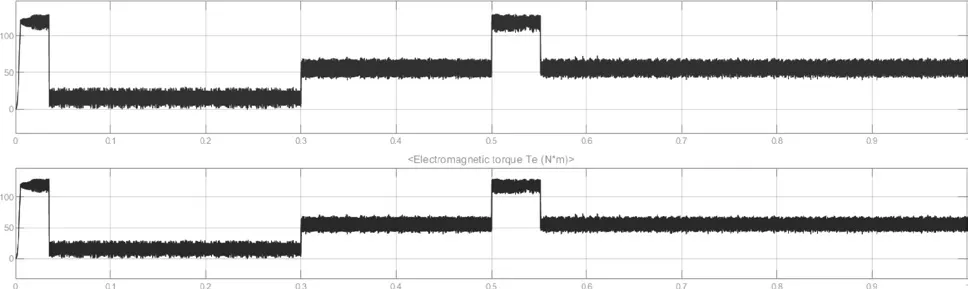
图4 实际转矩和转矩估计值
3 总结
本设计对异步电机在低频条件下的控制效率进行研究提出一种基于电压模型具有限幅补偿功能的新型定子磁链观测器,并采用模型参考自适应速度观测算法,去实现对速度的辨识,不仅大大降低成本,而且避免大量电资源的浪费,对电机节能提供了新思路,具有很大的发展前景。
猜你喜欢
防爆电机(2020年4期)2020-12-14
哈尔滨铁道科技(2020年4期)2020-07-22
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年12期)2015-04-09
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年11期)2014-04-04
