
基于步态规划的四足机器人运动学分析和仿真*
2021-08-02 08:03陈景聪
组合机床与自动化加工技术 2021年7期
郭 建,赵 易,陈景聪
(广州城市理工学院机械工程学院,广州 510800)
0 引言
仿生机器人中比较典型的有哺乳动物四足机器人和昆虫类的六足、八足机器人,四足动物因其独特的特点,一直是研究的热门,国内外针对四足机器人的研究都取得了一系列成果。文献[1]研究设计了球腿复合机器人,优化了足端轨迹。文献[2]研究了负载四足机器人的对角步态行走的稳定性,并利用虚拟样机技术进行了仿真。文献[3]研究了四足机器人在粗糙地面的对角小跑运动,设计了基于CPG的控制方法。上海交通大学研发了 JTU-WM—III,对传统机器人足端摆线轨迹进行了修改[4-5]。山东大学基于液压驱动研发了四足机器人 SCalf-1,建立了关节能耗模型,基于傅里叶级数展开式优化了足端轨迹[6-8]。
麻省理工学院的Raibert 等研发一种基于气缸驱动的四足机器人,具有触地缓冲和跳跃动作,能够完成对角小跑和跳跃步态[9]。美国通用电器研发的四足步行机器人 Walking Truck[10]。日本的木村浩等研发了四足机器人 Tekken[11-13],运动速度快,机构设计复杂,能耗低。美国波士顿动力公司研发 的“big dog”机器人对环境情况具有更好的感知和适应能力,在受到侧面冲击时,能通过调整步态恢复平衡状态[14]。
为了研究四足机器人的运动学和腿部结构,设计了一个四足串联机器人,每个单腿3个自由度,整机共12个自由度。首先对四足机器人进行运动学建模和分析,推导了正解和逆解的数学公式,并用MATLAB仿真了四足机器人的单腿的运动学正解和逆解,并将公式计算结果和仿真结果进行对比,分析机器人对角步态和单腿运动,计算了机器各个关节转角的函数表达式,计算四条腿的各个关节的驱动函数,最后通过ADAMS仿真,分析仿真结果,为四足机器人物理样机的制作提供数据支撑,有助于缩短研发周期,提升研发效率。
1 整机结构
四足机器人的整机结构模型和单腿模型如图1和图2所示,四组机器人的外观尺寸长×宽×高为:810 mm×500 mm×700 mm,总体机身重量6.5 kg。四足机器人的整机结构模型是由机身结构和腿部结构两部分组成的,机身结构模型采用的材料是铝合金。四组机器人的腿部结构主要由腰关节、髋关节、膝关节和足部组成。该四足机器人左前腿、右前腿、左后腿、右后腿结构完全一样,通过控制关节的转动实现机器人的运动。
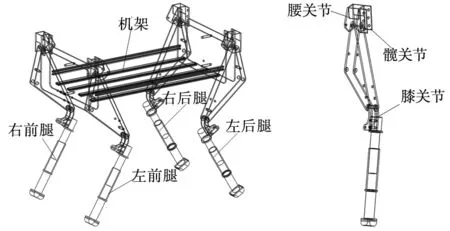
图1 整体结构 图2 单腿结构
2 运动学建模和计算


图3 四足机器人左前腿部坐标系

表1 左前腿D-H参数表
根据表1中的参数,可以得到如下变化矩阵:
(1)
(2)
(3)
(4)
sij=sinθicosθj+cosθisinθj,cij=cosθicosθj-sinθisinθj
(5)

足部端点在基坐标中数值0p=[131.4724 0 689.4792]T。

(6)
(7)
pzs2+(pys1+pxc1-a1)L2=L2+L3c3
(8)
pzc2-(pys1+pxc1-L1)s2=L3s3
(9)
pxs1-pyc1=0
(10)
由式(10)得:
(11)
由式(8)的平方加式(9)的平方得:
(12)
(13)
由式(13)得:
(14)
求得角度:
(15)
2.1 正解的验证
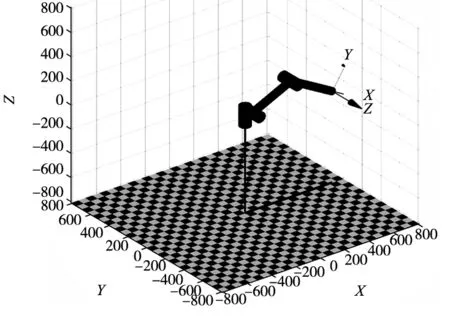
图4 机器人的单腿简化模型

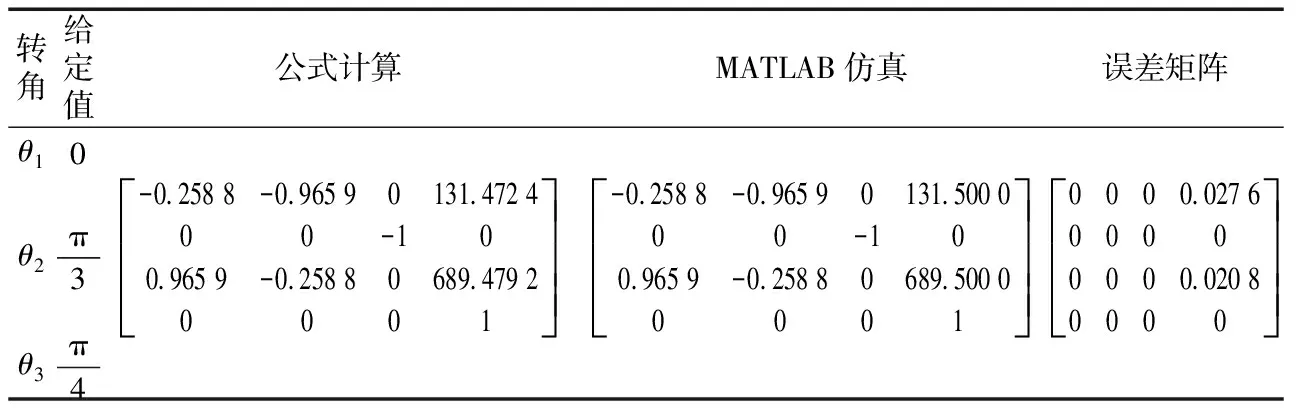
表2 正解的验证1
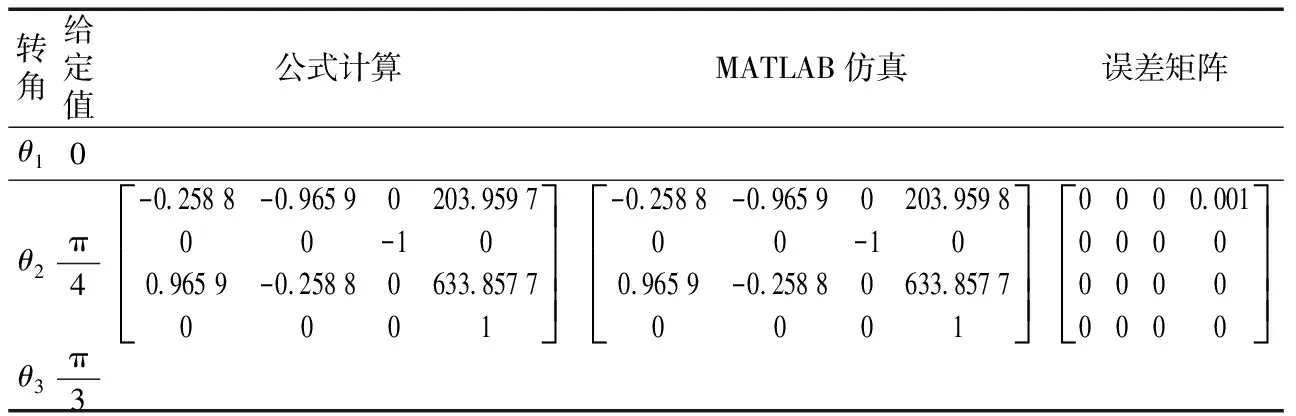
表3 正解的验证2

表4 正解的验证3
通过对表2~表4对比发现,理论推导的正解结果和MATLAB仿真的结果的误差最大误差是0.02%,误差主要来源于无限不循环小数,这个结果表明理论和仿真结果基本一致。
2.2 逆解的验证

表5 逆解验证1
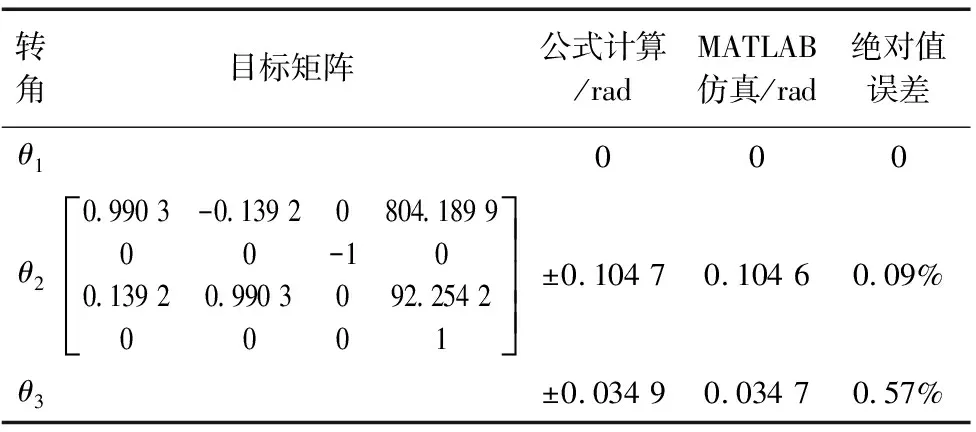
表6 逆解验证2

表7 逆解验证3
从以上3个表我们可以发现,对于给定的机器人的姿态和位置矩阵,通过数学公式计算的角度值存在正负两组值,其绝对值和MATLAB的仿真结果基本一致,这从侧面反映出机器人运动学逆解的结果不是唯一的,从公式的计算结果分析,从节省时间和机器人单腿的姿态分析,取正值作为其最优解。运动学正解和逆解的正确性可以为后期轨迹规划提供关键点。
3 关节转角计算
仿生四足机器人行走步态采用对角步态。四足机器人的左前腿、右前腿、左后腿、右后腿分别用LF、RF、RB、LB表示。在机器人行走过程中,定义对角线上的两条腿是一组对角腿,LF和RB为A组对角腿,LB和RF为B组对角腿 。这两组对角腿的关节摆动角度具有固定的相位关系,为了研究方便,把它们分为支撑相和摆动相,四足机器人对角步态运动机理如图5所示,黑色方块则代表摆动相腿部的抬腿,白色方块代表支撑相腿部的着地。
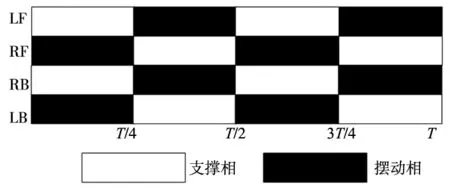
图5 四足机器人对角步态运动机理
四足机器人单腿运动分析如图6所示。

图6 单腿运动分析
根据图6可以得到:
(16)
根据式(16)可以求出髋关节转角Ah和膝关节的转角Ak。
(17)
其中,S表示机器人的步长,ν表示机器人的运动速度,β是占空比,T是机器人的运动周期,L是髋关节和机器人脚步落脚点的长度。根据式(17)可以发现摆动角Ak和小腿长度L3以及θ0和抬腿高度h有直接关系,髋关节转角Ah和步长、占空比、大小腿长度、θ0有直接关系。
4 步态规划和仿真
4.1 对角步态规划和仿真
在实际的设计中取θ0=26°,设定机器人的行走速度v=0.2 m/s,行走周期T=2 s,h=0.02 m,对角步态的占空比β=0.5。代入式(16)和式(17) ,可以计算出抬腿高度、髋关节转角和膝关节的转角。Ah=8.531,Ak=5.92。机器人在对角步态行走的时候,腰关节保持不动,只有髋关节和膝关节转动,在一个周期内,髋关节和膝关节的角度随着时间而变化,分别用θ2和θ3表示。各个关节的表达式如式(18)所示。
(18)
将式(18)计算的表达式导入ADAMS软件中,对四足机器人进行对角步态仿真,步态仿真如图7所示,仿真时间设置20 s,行走10个周期。

图7 对角步态步态仿真图
机器人在行走过程中的质心的变化如图8~图10所示。

图8 机器人质心X方向变化
图8中,在X的前进方向中,20 s的位置是3.8 m,平均速度约为0.19 m/s。这和我们公式最初设计的速度0.2 m/s基本一致。

图9 机器人质心Y方向变化
图9中,在20 s内,前进3.8 m,Y的偏移量0.12 m,反应了机器人前进方向上的偏离幅度,主要原因是因为没有设定腰关节的角度。

图10 机器人质心Z方向变化
图10中,在机器人的行走过程中,机器人质心的上下振动幅度是0.025 m,上下振动幅度很小。
4.2 三角步态规划和仿真
机器人的行走速度v=0.3 m/s,行走周期T=2 s,h=0.02 m,对角步态的占空比β=0.75。代入式(16)和式(17) ,可以计算出抬腿高度、髋关节转角和膝关节的转角。Ah=12.857 1,Ak=5.92。机器人在对角步态行走的时候,腰关保持不动,只有髋关节和膝关节转动,在一个周期内,髋关节和膝关节的角度随着时间而变化,分别用θ2和θ3。各个关节的表达式如式(19)所示:
(19)
将式(19)计算的表达式导入ADAMS软件中,对四足机器人进行对角步态仿真,步态仿真如图11所示,仿真时间设置20 s,行走10个周期。
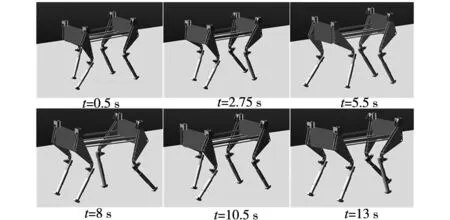
图11 三角步态步态仿真图
机器人在行走过程中质心的变化如图12~图14所示。
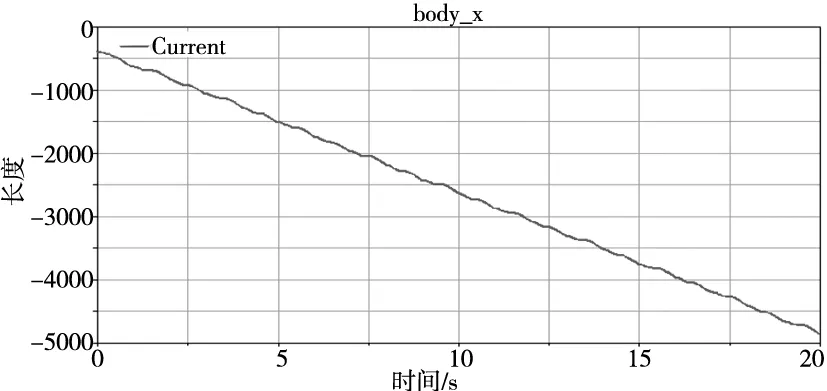
图12 机器人质心X方向变化
图12所示,在X的前进方向中,20 s的位置是6.5 m,平均速度约为0.325 m/s。这和我们公式最初设计的速度0.3 m/s基本一致。
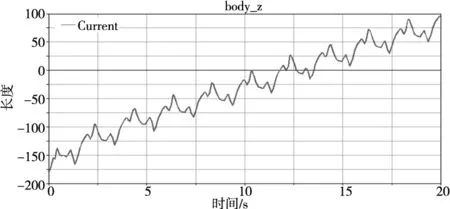
图13 机器人质心Y方向变化
图13所示,在20 s内,前进6.5 m,Y的偏移量为0.3 m,反应了机器人前进方向上的偏离幅度,主要原因是因为没有设定腰关节的角度。
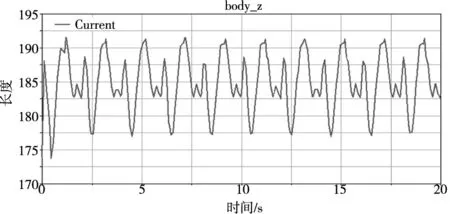
图14 机器人质心Z方向变化
图14所示,在机器人的行走过程中,机器人质心的上下振动幅度是0.002 m,上下振动幅度很小。
5 结论与展望
对设计的四足机器人进行了运动学建模,对模型的正解和逆解进行了数学和仿真。基于对角和三角步态进行了步态规划和仿真。
(1)对设计的四足机器人进行了运动学建模,对模型的正解和逆解进行了数学分析和仿真,验证其正确性,为后续利用MATLAB做路径规划做了基础。
(2)分析和推导四条腿了髋关节和膝关节的角度表达式,为后续控制系统设计调占空比提供了基础,为分析多步态的切换提供了研究方向。
(3)基于对角步态和三角步态进行了步态规划,在对角步态和三角步态下利用ADAMS进行了20 s的仿真,仿真结果符合预期。
机器人不同步态的平缓切换,以及不同地形的髋关节和膝关节的角度表达式是后期继续研究的目标。
猜你喜欢
火力与指挥控制(2021年6期)2021-08-06
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
数学年刊A辑(中文版)(2018年4期)2019-01-08
制造技术与机床(2018年11期)2018-11-23
知识经济·中国直销(2018年6期)2018-06-29
发明与创新·大科技(2017年7期)2017-07-17
海军航空大学学报(2015年1期)2015-11-11
恋爱婚姻家庭(2015年36期)2015-09-22
文山学院学报(2012年6期)2012-03-25
