
一种考虑三相故障相角跳变补偿的后续换相失败抑制方法
2021-08-05 02:33徐志李胜男郭成邢超
广东电力 2021年7期
徐志,李胜男,郭成,邢超
(云南电网有限责任公司电力科学研究院,云南 昆明 650217)
我国一次能源与电力需求呈逆向分布,高压直流 (high voltage direct current,HVDC) 输电技术凭借其输电距离远、容量大、控制灵活、调度方便、损耗低、输电走廊占用少等诸多优点得到了广泛的应用。但是,基于电网换相换流器的高压直流输电采用换流元件为晶闸管,无自关断能力,在受端电网故障下很有可能发生换相失败,进而使得直流电流迅速增大,直流电压迅速下降,传输功率迅速减小,在故障严重时可能导致直流系统闭锁,这将对直流输电系统的高效、安全、稳定运行造成严重影响[1-3]。
针对换相失败,国内外学者做了许多机理研究。文献[4]对HVDC输电系统换相失败的影响因素进行了较为全面的分析与总结,指出换流母线电压下降、越前触发角减小、直流电流增大、过零点偏移等因素易导致换相失败。文献[5]指出,对于单次的换相失败,如果故障清除及时,换流阀在清除故障后都能恢复正常换相;但是当引发换相失败的故障未在短时间内清除时,直流系统在故障恢复的过程中极易出现后续换相失败现象。一般来说,首次换相失败难以避免,但是采取适当的措施可以抑制后续换相失败[6]。
针对后续换相失败的抑制措施,国内外学者已经做了一些研究。在主电路拓扑结构方面,文献[7-8]提出将可控子模块串联到阀臂中以改善换相过程。文献[9-10]则提出将可控子模块串联到换流阀和换流变压器之间以改善换相过程。这两类改变换流器拓扑的方法均能提高系统抵御换相失败能力。但第一类方法需对一次系统和控制系统进行较大改造;第二类方法无需对原换流阀改造,但是仍增加了一定投资成本,且增加了控制系统的复杂度。在无功补偿装置方面,文献[11-14]提出在受端电网加装无功补偿装置可以抑制换相失败,该类措施对抑制后续换相失败有较好效果,但也需要增加较大的投资成本。
在直流系统控制方面,许多学者对低压限流控制[15](voltage dependent current order limiter,VDCOL)进行了改进。文献[16]设计了一种非线性VDCOL控制策略,根据故障严重程度提高直流电流指令响应速度来抑制后续换相失败,但其计算过程较为复杂。文献[17-18]分别提出了加入虚拟电阻和虚拟电感的VDCOL控制策略,能有效地降低后续换相失败发生的概率,但虚拟电阻或虚拟电感压降的存在会改变直流系统故障后稳态运行状态,不利于故障恢复。除了针对VDCOL,文献[19]则指出逆变侧交流系统不对称故障后实际超前触发角的波动是引发后续换相失败的重要原因,并提出了一种通过滞环控制来减小实际超前触发角波动范围的抑制后续换相失败的控制策略,但是该策略仅对不对称故障时的后续换相失败有抑制作用。文献[20]指出首次换相失败后交流电压剧烈波动导致锁相环暂态误差是引发后续换相失败的原因,但并未指出锁相环暂态误差产生的原因。
本文首先分析三相故障后受端换流母线电压相角跳变的情况,发现感性接地故障与直流功率上升会导致超前的相角跳变,而阻性接地故障与直流功率降低会导致滞后的相角跳变。并进一步研究相角跳变对换相失败的影响,滞后的相角跳变有利于换相过程,而超前的相角跳变不利于换相过程。然后通过对比首次换相失败与第二次换相失败时各电气量的波形图,指出相角跳变是引发后续换相失败的重要原因,并基于换相-电压时间面积法则以及相角跳变对换相失败的影响,设计了相角跳变补偿模块,通过提高故障期间的超前触发角来抑制后续换相失败。最后,在PSCAD/EMTDC的CIGRE BENCHMARK模型中进行了大量仿真,结果表明,提出的考虑相角跳变补偿的抑制后续换相失败控制方法能够有效抑制不同类型引起的后续换相失败。
1 相角跳变机理分析
1.1 系统拓扑结构变化导致的相角跳变分析
当受端电网发生三相接地故障时,可以将故障等效成一个短路阻抗,此时,可以得到整个受端的等效电路如图1所示。图1中:Us为交流电网电压;Up为换流母线电压;XL和RL分别为线路电抗和线路电阻;Zsc为短路阻抗;Is为交流电网发出的电流;Isc为短路电流;IHVDC为HVDC系统发出的电流。
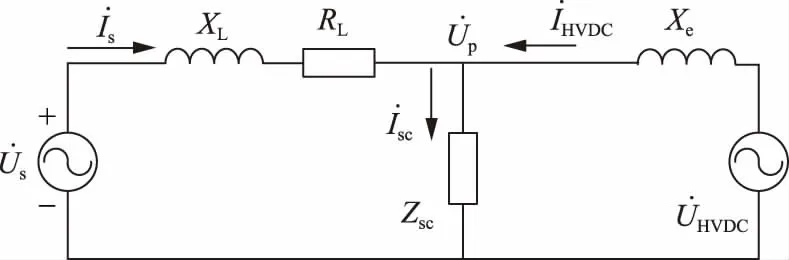
图1 故障后受端系统等效电路
为了分析Up的相角跳变Δθ,即故障前后Up的相位差,在假设IHVDC不变的情况下,Up相角跳变的大小可近似于不考虑HVDC系统时受端系统有无Zsc情况下Up的相位差,当短路阻抗为阻性时,即Zsc=Rsc时,有
(1)
需要注意的是,式(1)仅能说明故障后稳态下,故障程度对相角跳变大小的影响。
以PSCAD/EMTDC中的HVDC标准模型CIGRE BENCHMARK[21]为例,其短路比(short circuit ratio,SCR)为2.5,将受端交流系统的参数代入式(1),可得Δθ与短路电阻Rsc的关系如图2中实线所示。此外,还给出了SCR为5.0和7.5时相同短路电阻下的Δθ大小。由图2可知,短路电阻越小,即故障越严重时,Δθ越大,且为滞后的相角跳变。其原因可作如下解释:当换流母线发生阻性接地故障后,相当于突然接入1个大功率的有功负载,导致受端换流母线所需的有功功率急剧增加。因为HVDC系统输送的功率不能瞬时增加,这将导致换流母线往交流电网输送的功率减小。根据电力系统运行的基本原理,相角差决定有功功率的传输,而受端连接的电网相位近似不变;所以,换流母线电压相角在发生故障后相对故障前滞后了,滞后的程度取决于故障程度。此外,SCR越大,同样的短路电阻造成的相角跳变越小。

图2 不同SCR下相角跳变与短路电阻关系
同理,当短路阻抗为感性时,即Zsc=Xsc时,有
(2)
式中Xsc=ωLsc,Lsc为短路电感,ω为角频率。
图3给出了不同SCR时相同短路电感下的相角跳变大小。由图3可知,当发生感性接地故障时,换流母线电压相角会有较小的超前的相角跳变,且故障越严重,跳变越大。同理,SCR越大时,同样的短路电感造成的相角跳变越小。
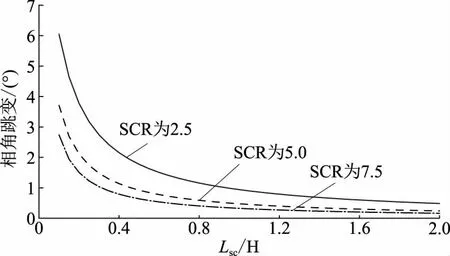
图3 不同SCR下相角跳变与短路电感关系
1.2 直流功率变化导致的相角跳变分析
将整个受端换流站看做一个源,考虑XL≫RL的情况,可以得到受端系统的等值电路如图4所示,其中P1、Q1和P2、Q2分别为换流站发出功率和交流电网吸收功率。
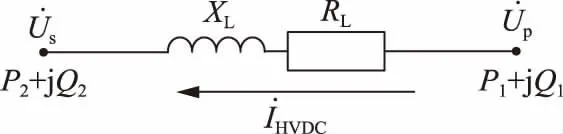
图4 受端系统等效电路图
由潮流分布有
P1+jQ1=P2+jQ2+ΔSL,
(3)
式中ΔSL为线路损耗,有
(4)
以Us的相位为参考轴,可求得电压降落的纵分量ΔUsy和横分量ΔUsx为:
(5)
结合式(3)、(4)、(5)得到Up与Us的相位差
(6)
以Us的相位为参考,且受端连接电网的相位近似不变,则Up与Us的相位差δ即为Up的相位。由式(6)可知:当直流功率降低,换流站发出功率P1降低时,Up的相位会减小,发生滞后的相角跳变;相反,当换流站发出功率P1升高时,Up的相位会增大,发生超前的相角跳变。
从本质上而言,受端系统潮流的变化导致了换流母线电压相角的变化。故障后受端系统拓扑结构的变化和直流控制系统引发的直流功率的变化都会改变受端系统的潮流分布,导致换流母线电压相角发生跳变。
2 后续换相失败的原因分析
2.1 考虑相角跳变的换相失败分析
晶闸管在关断之后,需要承受一段时间的反向压降才能可靠关断,一旦晶闸管所承受反向压降的时间小于其载流子复合所需要的时间,即晶闸管未能恢复阻断能力,在换相电压由负变正后,晶闸管将无法关断,发生换相失败[21]。
目前,最为经典的关断角计算公式为[22]
(7)
式中:γ为关断角;Id为直流电流;Xe为换相电抗;ULL为换流母线线电压有效值;β为越前触发角。
考虑到相角跳变,式(7)可修改为
(8)
当发生超前的相角跳变时,Δθ> 0;当发生滞后的相角跳变时,Δθ< 0。
从式(8)可以看出,直流电流增大、换相电感增大、换流母线电压减小、越前触发角减小、超前的相角跳变都会导致关断角γ的减小。一般认为晶闸管阻断能力恢复时间在400 μs左右。当关断角γ小于极限关断角γmin时,发生换相失败,文中取γmin=7°。
2.2 考虑相角跳变的换相失败分析
在标准模型中设置时间t=1.0 s时发生三相接地故障,短路电感为1 H,持续时间为0.5 s。此时系统受端发生了后续换相失败,其响应如图5(a)所示,图5(a)中2组虚线分别标出了第一次与第二次换相失败前后时段;图5(b)、(c)分别为时间尺度放大后2组虚线内的波形,图5(b)、(c)中的虚线分别标出了2次换相失败发生时刻。
图5中,共有关断角、线电压有效值、电压相角、越前触发角、直流电压、直流电流、直流功率7个电气量,根据式(8)可知,线电压有效值、电压相角、直流电流、越前触发角均会对关断角造成影响。由图5(b)可知,在发生第一次换相失败前,线电压有效值有明显下降,直流电流有一定上升,相角有较小的超前跳变,此时直流控制系统已开始响应,增大了越前触发角,但最终仍发生了换相失败;而由图5(c)可知,在发生第二次换相失败前,线电压有效值、直流电流、越前触发角的变化都很小,仅相角有较大的超前跳变。根据式(8)可知,超前的相角跳变对换相过程不利,所以第二次换相失败的发生极有可能是超前的相角跳变导致的。同时,根据换相电压-时间面积理论可知,在线电压有效值几乎无变化的情况下,超前的相角跳变会导致关断面积减小,致使发生换相失败。在第二次发生换相失败后的恢复过程中并没有发生第三次换相失败,该恢复过程中各电气量特征与第一次换相失败后的恢复过程中基本类似,但是其越前触发角更大,避免了第三次换相失败的发生。

图5 后续换相失败时系统响应波形
3 考虑相角跳变补偿的后续换相失败抑制方法
在CIGRE标准模型中,其受端系统的控制主要包括定电流控制器、定关断角控制器、电流偏差控制器、VDCOL,加上文中所提的相角补偿模块后,其控制框图如图6所示。图6中:Ud_inv为逆变侧直流电压测量值;Id_inv和Id_rec分别为整流侧和逆变侧直流电流测量值;γY和γΔ分别为上端阀组和下端阀组的关断角测量值;γ0为关断角整定值;“min in cycle”为周期取小模块,其输出为输入量在上一个工频周期内的最小值;Id_ord为VDCOL生成的电流指令;βinv_I和βinv_γ分别为定电流控制和定关断角控制生成的越前触发角指令;βinv为逆变侧的实际越前触发角指令;αinv和αrec分别为整流侧和逆变侧的触发角指令。

图6 直流输电系统控制框图
滤波单元为一阶惯性环节,用于模拟直流电压、直流电流的测量过程。在实际运行过程中,利用电流偏差控制器实现定关断角控制和定电流控制的平滑切换。VDCOL则是通过检测受端交流电压或直流电压下降至某一值时开始降低直流电流指令,减小直流电流,促进换相过程。
此外,逆变侧还有所提的相角跳变补偿控制,根据2.2节的分析可知,换流母线电压相角的超前跳变是导致后续换相失败的重要原因,所以可以通过检测超前的相角跳变来增大越前触发角对后续换相失败进行抑制。
为了减小谐波对锁相环性能的影响,CIGRE标准模型中配备的锁相环比例系数设置较小,难以实现相角跳变的实时检测。因此,本文利用二阶广义积分器(the second-order generalized integrator-based quadrature-signals generator, SOGI-QSG)和同步锁相环(synchronous reference frame PLL, SRF-PLL)来实现相角跳变的快速测量。两者结合而成的SOGI-PLL[23]控制框图如图7所示。图7中:u为换相电压;k和kp分别为QSG的增益和PLL的增益;ω′和ω0分别为QSG的谐波频率和系统频率;u1和u2分别为生成的2个正交信号;φ为输出的相角,s为拉普拉斯算子。

图7 SOGI-PLL控制框图
使用SOGI-PLL可以得到任意换相电压的实时相角,利用当前时刻测得的相角减去上一周期的相角即可得到相角跳变Δθ,使用该相角跳变量可以对触发角进行相应补偿。相角跳变补偿模块如图8所示,图中,延时模块的时间常数取为20 ms。正常情况下,受端触发角是由直流控制系统给出,由于此时电压相角保持恒定,相角跳变补偿模块输出为0。当故障发生后,相角跳变产生,相角跳变补偿模块则根据测得的各换相电压相角跳变的最大值对触发角指令进行相应补偿。考虑到SOGI-PLL测得的2个时间点的相角跳变Δθ可能存在突变,使得测量值与实际值相差2π;因此,在得到相角跳变后,将相角跳变分别与5π/3和-5π/3进行比较。当相角跳变大于5π/3时,将其减去2π得到实际差值;当相角跳变小于-5π/3时,将其加上2π得到实际差值。
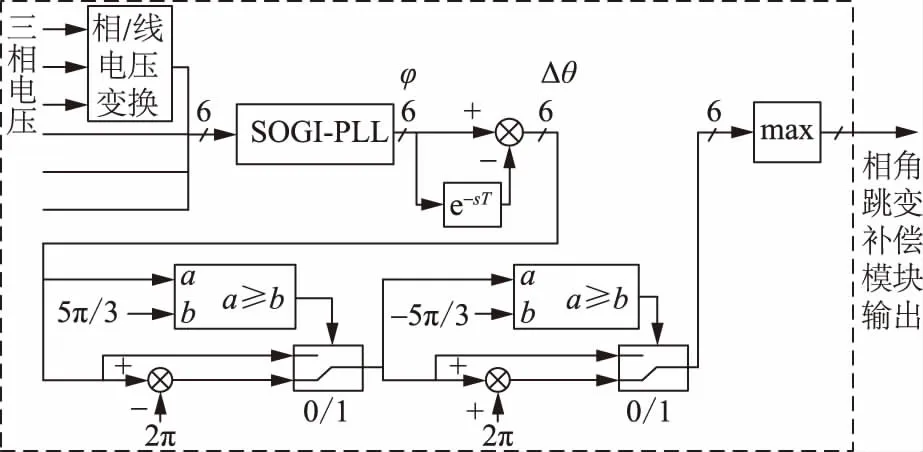
图8 相角跳变补偿模块框图
4 仿真验证
仿真的直流输电模型采用国际大电网会议高压直流输电标准模型CIGRE BENCHMARK,其具体参数见表1。

表1 CIGRE BENCHMARK 参数
4.1 系统结构变化导致的相角跳变
在标准模型中设置t=1 s时发生三相接地故障,短路电阻分别为50 Ω、100 Ω、150 Ω、200 Ω、238 Ω,在t=1.05 s清除故障与不清除故障的情况下,其换流母线电压的相角波形分别如图9(a)、图9(b)所示。
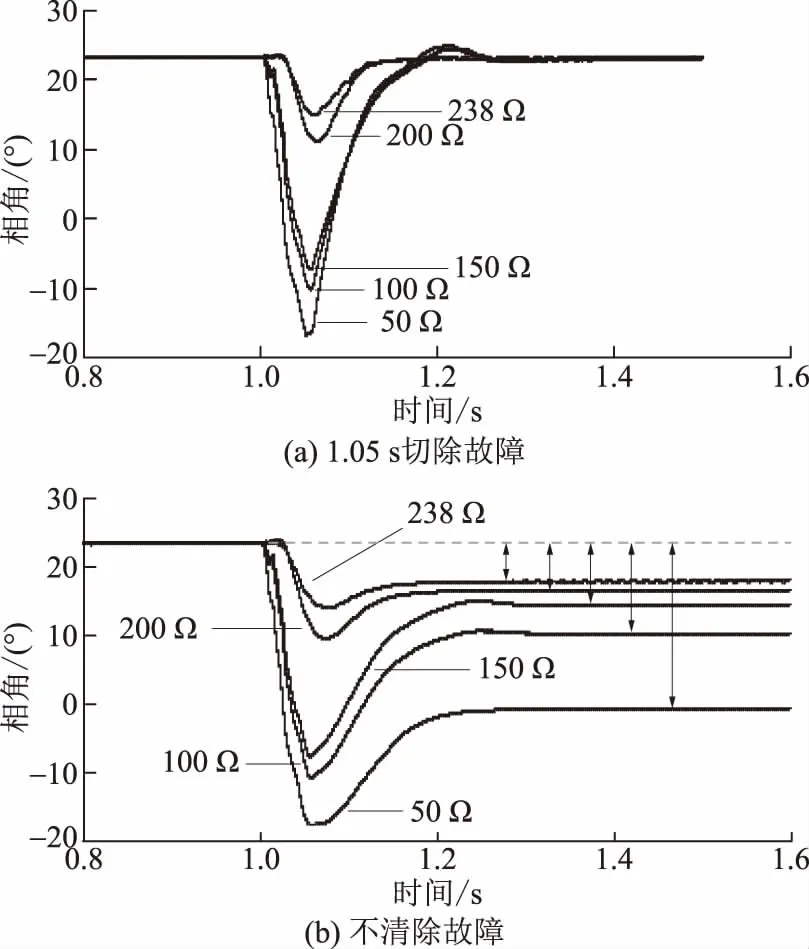
图9 短路电阻不同时换流母线相角波形
由图9(a)、图9(b)可知,当受端发生阻性接地故障时,其换流母线电压相角会有滞后的跳变。在短路电阻越小,即故障越严重时,其滞后的相角跳变程度越大,并且相角跳变的速度更快。而在故障清除后,其相角又会恢复到之前正常运行状态时的值。图9(b)验证了式(1)的推导,两者从仿真结果上与理论上说明了阻性接地故障越严重则滞后的相角跳变越大。此外,图9(a)中暂态过程时相角跳变更大是由故障后直流功率降低造成的。
在标准模型中设置t=1 s发生三相接地故障,短路电感分别为1.2 H、1.6 H、2 H、2.4 H,在t=1.05 s清除故障与不清除故障的情况下,其受端交流母线电压相角波形如图10(a)、图10(b)所示。
由图10(a)、图10(b)可知,当受端发生感性接地故障时,其换流母线电压相角会有超前的跳变,并且故障越严重,其相角跳变的速度越快、幅值越大。同样的,在超前的相角跳变后相角又有滞后的跳变,是故障发生后传输的直流功率降低造成的。图10(b)中的放大图验证了式(2)的推导,两者从仿真结果上与理论上说明了感性接地故障越严重则超前的相角跳变越大。

图10 短路电感不同时换流母线相角波形图
4.2 直流功率变化导致的相角跳变
在标准模型中设置t=1.0 s时直流电流指令发生变化,由1.0(标幺值,下同)分别变为0.8、0.6和0.4,在t=1.4 s时直流电流指令恢复,其受端交流母线电压相角波形和HVDC系统直流功率如图11所示。

图11 直流功率变化时波形
由图11可知:在直流电流指令降低后,直流功率也开始降低,并且换流母线电压相角也开始滞后的跳变;而在直流电流指令恢复后,直流功率开始上升,并且换流母线电压相角也开始超前的跳变。该仿真结果与1.2节中的分析是一致的。
4.3 典型案例仿真分析
为了验证文中所提考虑相角跳变补偿的抑制后续换相失败控制方法的正确性与可靠性,针对CIGRE标准模型控制方法以及本文所提控制方法,在标准模型中进行相应仿真。
案例1:设置t=1.5 s时发生三相接地故障,短路电感为2.2 H ﹝电压有效值跌落至0.898(标幺值,下同)﹞,t=2 s时清除故障,模拟程度较轻的故障。此时,采取传统控制方法和文中所提控制方法时系统各电气量分别如图12(a)和图12(b)所示。
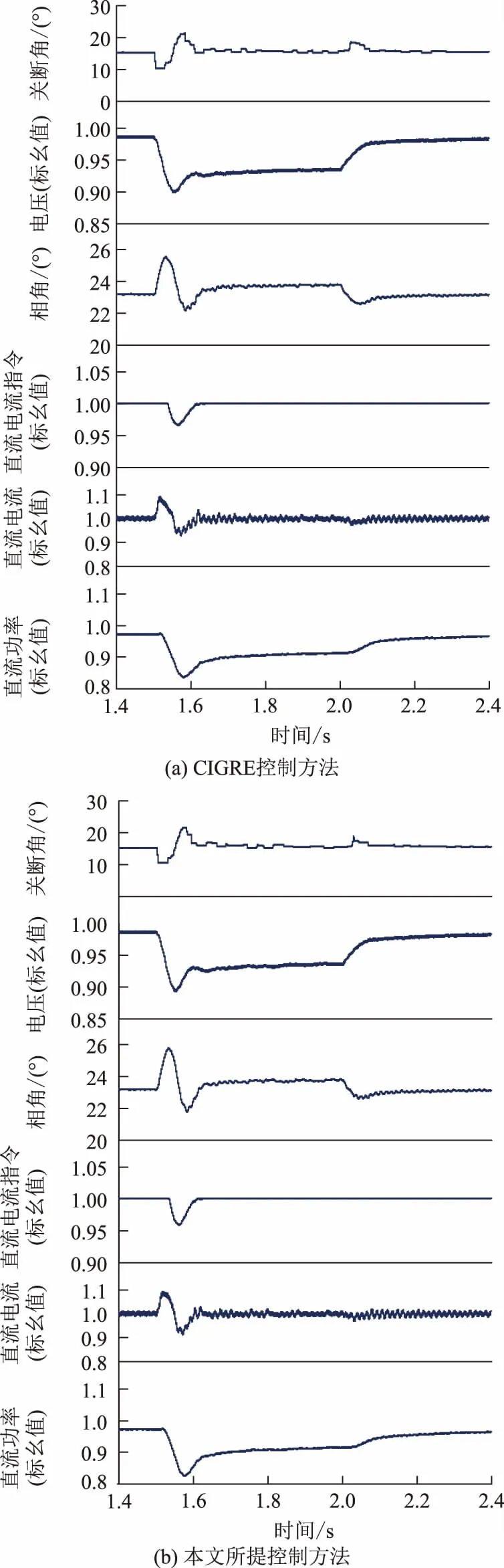
图12 轻微三相故障下不同控制时系统响应波形
对比图12(a)、图12(b)可知,当故障程度较轻时,加入的相角补偿模块对系统的响应几乎没有造成任何影响。经大量的仿真分析可知,对于其他不同类型和不同程度的故障,如果在采取传统控制方法时未发生换相失败,那么在采取本文所提控制方法时也不会发生。即加入相角补偿模块后不会减弱系统的换相失败免疫力与故障恢复能力。
案例2:设置t=1.5 s时分别发生单相接地故障、三相接地故障、相间短路故障、两相接地故障(电压有效值分别跌落至0.830、0.750、0.795、0.804),短路电感均为0.4 H,t=2 s时清除故障,模拟程度较严重不同类型故障。此时,采取CIGRE控制方法和本文所提控制方法时系统各电气量分别如图13(a)、图13(b)、图13(c)和图13(d)所示。
由图13(a)可知,当发生较为严重的单相接地故障时,采取传统控制方法在故障后以及直流系统恢复过程中共会发生3次换相失败,即发生了后续换相失败。而在采取文中所提控制方法时,相角补偿模块提高了直流系统故障恢复过程中的越前触发角,使得原本第二次换相失败发生时关断角仍维持在10°以上,避免了后续换相失败。同时,在故障后以及故障恢复过程中,采取所提控制方法时系统运行特性更优。由于在不对称故障下直流功率的特性与对称故障下类似,故所提方法在不对称故障下仍有一定效果。

图13 不同类型故障下系统响应波形
此外,为了衡量所提的控制方法对抑制后续换相失败的效果,需要对传统控制方法、文中所提控制方法在不同类型和不同程度故障下的响应特性进行大量的仿真分析和对比,因此,在受端交流母线设置不同程度的单相接地故障、三相接地故障、相间短路故障和两相接地故障,故障发生时刻为t=1.5 s,故障持续时间为0.5 s。在不同接地电感情况下,其仿真结果如图14所示,图中:白色代表无论是否投入所提方法都没有换相失败发生或仅有1次换相失败发生的情况;灰色代表所提方法能够抑制后续换相失败的情况;黑色代表所提方法无法抑制后续换相失败的情况。从图14中可以看出,所提方法在大部分情况下均可抑制后续换相失败。

图14 不同故障类型与不同故障时刻下仿真结果
5 结论
本文结合换流母线电压相角跳变对换相失败的影响,提出一种考虑三相故障相角跳变补偿的抑制后续换相失败控制方法。经过理论分析和仿真验证,得到以下结论:
a)揭示了相角跳变的发生机理,一是故障后受端系统拓扑结构的变化,二是故障后直流系统传输直流功率的变化。
b)超前的相角跳变不利于换相过程,是导致后续换相失败发生的重要原因。
c)所提控制能有效地降低HVDC系统后续换相失败发生的概率,减少故障对换流阀的冲击,并有效地改善系统的运行特性与故障恢复特性。
猜你喜欢
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
自动化与仪表(2018年7期)2018-07-31
电子制作(2018年1期)2018-04-04
电气开关(2016年6期)2016-08-11
西安工程大学学报(2016年2期)2016-06-05
电测与仪表(2016年6期)2016-04-11
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
