
基于多特征优选的无人机可见光遥感林分类型分类
2021-08-10 01:58周小成黄洪宇
林业科学 2021年6期
周小成 郑 磊 黄洪宇
(福州大学地理空间信息技术国家地方联合工程研究中心 空间数据挖掘与信息共享教育部重点实验室 福州 350116)
作为森林资源调查的关键参数,林分类型信息的精准提取对林业资源清查、生态健康评估等意义重大(Crossetal.,2019;Fassnachtetal.,2016)。传统的林分类型识别以实地调查为基础,不仅时间人力成本高,而且受空间范围限制(Yuetal.,2017)。遥感手段可对森林资源进行大范围内的周期性、可重复性观测(尹凌宇等,2016),其中,中等空间分辨率卫星遥感影像因覆盖范围广常用于大区域尺度的林分类型信息提取,如刘云鹏等(2017)基于多时相Landsat影像识别了江苏全省的杨树(Populus)信息;但由于影像分辨率较低,在各林分交界处存在一个像元包含多种林分类型的情况,难以满足林分尺度森林资源调查以及林业生产的要求。高空间分辨率卫星遥感影像上纹理与树冠轮廓的差异明显,可用于区分更精细的林分类型,如Xie等(2019)基于2.1 m分辨率的资源三号卫星数据实现了内蒙古喀喇沁旗旺业甸实验林场7种树种的分布制图;Cross等(2019)以哥斯达黎加一个热带植物园为研究区,利用WorldView-3影像实现了6种热带树种的分类。虽然高空间分辨率卫星遥感影像在林分类型分类识别中取得了良好效果,但是价格高,成像质量受天气影响,重返周期较长,难以及时获取目标地区数据。随着通信与计算机技术的蓬勃发展,无人机遥感系统性能逐渐提高,已成为小区域林业遥感数据获取的新手段(范承啸等,2009)。
在基于无人机遥感数据的林分类型分类识别中,常用特征包括光谱特征、植被指数和纹理特征等。Brovkina等(2018)利用含有近红外波段的多光谱无人机数据结合植被指数进行多树种分类,结果表明,植被指数对提高林分类型分类精度具有一定意义,但在地物结构复杂区域,其带来的精度提升有限,还需要辅助其他特征。Gini等(2018)提取多光谱无人机影像多个窗口的纹理特征并结合光谱特征,林分类型分类精度从58%提升至87%。Michez等(2016)将从摄影测量点云中获取的冠层高度特征与多光谱影像相结合,构建适用于河岸森林环境的林分类型分类模型,结果发现,利用无人机数据生成的摄影测量点云可以提供地物高度信息,能够区分出光谱纹理特征相似而高度上存在明显差异的地物。Sothe等(2019)综合运用高光谱无人机数据中的光谱、纹理、植被指数以及高度特征对12种阔叶树种进行分类,总体精度达72.4%。除了光谱、植被指数、纹理和高度特征外,近年来表征空间特征的扩展的形态学多属性剖面(EMAPs)也被广泛用于高分辨率遥感信息提取(Samiappanetal.,2017;Zhangetal.,2019)。此外,分类方法也是影响林分类型分类精度的重要因素,常见的林分类型分类方法主要包括最小距离法、最大似然法等传统算法以及决策树、支持向量机、随机森林等机器学习算法(任芯雨,2016;Ginietal.,2014;Xieetal.,2019),其中随机森林算法和支持向量机应用最为普遍。随机森林算法参数设置简单,对高维数据和大数据量的影像处理效率高于支持向量机,在林分类型分类识别中被广泛应用(郭玉宝等,2016;Maschleretal.,2018)。近年来兴起的深度学习算法也被应用到林分类型分类中,如林志玮等(2019)利用DenseNet网络实现了无人机影像树种分类识别,但该方法需要大量样本数据,复杂的模型参数调整以及长时间的模型训练才能获得较高的分类精度,而随机森林算法仅需要较少的样本训练就能获得高精度的分类结果(温小乐等,2018)。
已有研究往往利用单一或少量特征组合进行林分类型识别,分类效果较差,而较多特征组合分类又会造成数据冗余和维度灾难。王娜等(2017)研究指出,特征优选可以降低特征维度,提升分类器的运行效率和分类精度。递归特征消除随机森林算法(RF_RFE)是一种比较常见的特征优选算法,如Cheng等(2019)基于Sentinel-2数据进行秦岭山脉主要林分类型分类识别时,利用RF_RFE算法筛选出了最有利于林分类型分类的特征,提高了分类精度和效率。
目前,基于无人机遥感数据进行林分类型分类主要采用多光谱和高光谱数据,这2类数据可以提供丰富的光谱特征,然而由于影像采集和加工难度较大,在实际林业生产和森林资源调查中使用最多的是仅包含红、绿、蓝3个波段的无人机可见光数据。该数据常用于估算株数、树高等参数,在林分类型分类识别方面的研究还很少,林业部门积累了大量无人机可见光影像,但没有将其充分应用到森林资源调查上。鉴于此,本研究以无人机可见光遥感影像为数据源,综合扩展的形态学多属性剖面特征、光谱特征、植被指数、纹理特征、高度特征等构建分类模型,结合递归特征消除随机森林特征优选算法,使用随机森林分类器进行林分类型分类识别,以拓展无人机可见光遥感数据在森林资源调查中的应用范围。
1 研究区概况与数据
1.1 研究区概况
研究区位于福建省建瓯市房道镇,总面积0.16 km2,属中亚热带季风气候,多年平均气温18.7 ℃,年降水量1 663.8 cm。树种以天然生长的阔叶林和人工种植的毛竹(Phyllostachysedulis)、杉木(Cunninghamialanceolata)为主。研究区位置如图1a、b所示。

图1 研究区位置与样本分布Fig.1 Location of the study area and distribution of samples
1.2 数据获取与预处理
数据于2016年8月16日采集,使用小型固定翼eBee无人机,配备SONYWX220相机,相机的等效焦距为24 mm,像素为1 800万。航拍时高度为500 m,旁向重叠率和航向重叠率分别设置为60%和80%,同时使用差分GPS获取4个地面控制点。
将航拍影像、POS数据和地面控制点输入到Pix4Dmapper软件进行影像拼接,生成数字正射影像图(DOM)和数字表面模型(DSM)。影像分辨率为0.1 m,均方根误差为0.039 m,摄影测量点云密度为1.27 m-2。研究区影像大小为4 511行3 260列,总面积为0.16 km2,DOM和DSM如图1c、d所示。
1.3 森林分类系统建立与样本获取
依据正射影像目视判读情况结合《森林资源规划设计调查主要技术规定》,建立研究区林分尺度森林分类系统。由于主要研究对象为林分类型,因此将其他非林地类如农田、裸地、道路等统称为其他类别,最终将研究区地物类别分为阔叶林、针叶林、竹林和其他类别4类。利用分类系统在影像上选取样本,每个像素类别代表其所在位置属于的林分类型,其中阔叶林样本包含26 803个像素,针叶林样本包含39 601个像素,竹林样本包含30 039个像素,其他类别样本包含42 486个像素。样本总量占影像的0.9%。样本分布如图1c所示。
2 研究方法
为充分挖掘无人机可见光遥感影像的潜在信息,本研究考虑使用6类特征:原始影像的光谱信息、利用摄影测量点云生成表征高度的DSM、扩充光谱信息的植被指数、HSV三个颜色分量及其提取的纹理特征,以及表征空间信息的扩展的形态学多属性剖面。采用递归特征消除随机森林算法优选特征子集。根据不同类型特征和优选特征子集设置8组试验,使用随机森林分类器进行林分类型分类,以获得最佳分类方案。技术路线如图2所示。

图2 技术路线Fig.2 Technical flowchart
2.1 特征提取
2.1.1 植被指数提取 可见光数据仅包含红、绿、蓝3个波段的光谱信息,通过波段间的相互运算生成植被指数(VIs),从而扩充光谱信息。选择常见的8个可见光范围内的植被指数进行林分类型识别,8个植被指数在湿地水生植物识别(井然等,2016)以及农作物分布制图(Davidetal.,2016)中均取得了良好效果。计算公式如表1所示。

表1 可见光植被指数①Tab.1 Vegetation indices(VIs)derived from visible bands
2.1.2 纹理提取 纹理特征用于揭示影像上各地物灰度信息的分布规律,在结合光谱特征进行林分类型分类中具有良好表现。灰度共生矩阵(gray level co-occurrence matrix,GLCM)是提取纹理特征的常见手段(裴欢等,2018)。使用原始可见光影像进行纹理特征提取时,红、绿、蓝3个波段间存在一定的相关性,导致提取的纹理特征间存在冗余,不利于信息提取,因此本研究通过HSV色彩空间转换获得的颜色分量进行纹理特征提取(戴建国等,2018)。H表示色相(hue)、S表示饱和度(saturation)、V表示亮度(value),3个分量的计算公式如下:
(1)
(2)
V=max。
(3)
式中:max和min分别表示3个波段的最大值和最小值。
GLCM提供了8种纹理特征(Haralicketal.,1973),提取纹理特征的关键参数有窗口大小、步长和方向,这3个参数对林分类型纹理信息提取具有较大影响(Sotheetal.,2019)。本研究提取窗口大小为3×3、5×5、7×7、…、25×25的12组纹理特征,使用平均J-M(Jeffries-Matusita)距离来表达样本间的可分性,从而确定最佳纹理特征提取窗口(刘友山等,2012)。在确定最佳纹理特征提取窗口大小的前提下设置步长为1、2、3,方向为0°、45°、90°、135°,同时使用平均J-M距离确定最佳步长和方向,从而提取最佳纹理特征。平均J-M距离的定义公式如下:
(4)
式中:p(X/ωi)表示第i个像元属于第ωi个类别的几率。
J-M距离的取值范围为0~2,且当值在0~1之间时表明纹理特征不能对样本数据进行区分;当值在1~1.9之间时表明纹理特征可对部分样本进行区分;当值在1.9~2之间时表明纹理特征可以很好区分各样本(马娜等,2010;裴欢等,2018)。
2.1.3 扩展的形态学多属性剖面提取 扩展的形态学多属性剖面(extended morphological multi-attribute profiles,EMAPs)可对灰度影像进行多尺度特征提取,有效保留地物的几何特征,并削弱不重要的细节(Zhangetal.,2019;鲍蕊等,2016)。
选择特定的属性滤波器,根据设置的阈值集合{k1,k2,…,kn}对单个灰度影像I进行多次细化和粗化操作,获得I的属性剖面(AP)。计算公式如下:
AP(I)={φkn(I),…,φk1(I),I,γk1(I),…,γkn(I)}。
(5)
式中:φ和γ分别表示形态学中的细化和粗化操作;φkn(I)表示灰度影像I在形态学滤波器下根据阈值kn进行细化得到的特征影像;γkn(I)同理。
分别计算可见光影像3个波段的AP,将结果叠加得到扩展的属性剖面(extended attribute profile,EAP),多个属性的EAP叠加获得EMAPs。目前,常用的属性滤波有表征区域尺寸和形状的面积a和对角线长度d、表征区域像素灰度同质性的灰度值标准差s以及表示区域非紧致性的转动惯量i(史忠奎等,2018)。
由式(5)可知,EMAPs提取的关键是阈值设置。属性滤波a的阈值可通过目视确定;s的阈值计算公式详见Marpu等(2013);属性滤波i和d的阈值直接使用Mura等(2010)和Zhang等(2019)中的值,该阈值具有一定通用性。
提取的EMAP具有高维度特征,利用主成分分析选取每个EAP中包含信息量大于99%的前n个主分量来构建EMAPs(Ghamisietal.,2014)。
2.2 分类方法与特征选择
2.2.1 分类方法 随机森林(random forest,RF)是一种包含多株决策树的机器学习算法(宋荣杰等,2018)。在每株决策树生长过程中,分裂节点的最佳特征子集以基尼指数、信息增益为标准从原始特征集合中获得,当节点分裂达到事先定义的深度或节点上的样本无法再进行分类时停止节点分裂(马慧娟等,2019)。每株决策树单独完成分类后,由投票得出最终分类结果(吕杰等,2017)。随机森林算法需要设置决策树的数目和分裂节点的特征数目2个关键参数,本研究经过试验确定决策树的数目为150,分裂节点的特征数目为参与分类总特征数目的平方根。
2.2.2 特征选择 上述提取的众多特征并非都对无人机可见光数据林分类型分类有意义,特征选择可以在众多特征中找到最有利于林分类型分类的特征子集,从而提升模型的效率和分类精度。RF算法在进行Bootstrap抽样时,未被选择到的样本数据生成的袋外误差可用来计算不同特征变量的重要性(张磊等,2019)。递归特征消除(recursive feature elimination,RFE)是一种集成方法,其与RF算法结合在特征选择上可以达到较优的性能。基本过程是在RF特征重要性基础上对特征进行排序,每次从特征集中去掉重要性小的特征进行随机森林分类,逐次迭代直到特征集为空时停止(杨珺雯等,2015)。在此过程中将样本数据等分为10份,每个特征集分类时依次使用其中9份作为训练数据、1份作为验证数据,10次分类精度均值作为该特征集的分类精度。最后对比不同特征集下的分类精度确定最佳特征子集。
2.3 试验方案
为了探究无人机可见光数据林分类型分类的最佳方案,本研究设置8组试验,如表2所示。

表2 试验方案信息Tab.2 The information of experimental programs
2.4 精度评价
为了评估各特征在林分类型分类识别中的作用以及无人机可见光数据在林分类型分类应用中的可行性,采用人工目视解译方法,将研究区林分类型全部解译出来,生成真实的林分分布图建立混淆矩阵。混淆矩阵中总体精度(overall accuracy,OA)和Kappa系数用于评价整体的分类结果;生产者精度(production accuracy,PA)以及用户精度(user accuracy,UA)用于评价单个林分类型的漏分和错分情况。对于单个林分类型的分类精度评价,采用F统计值来表示(宋荣杰等,2017),计算公式如下:
(6)
式中:PAi表示类别i的生产者精度;UAi表示类别i的用户精度。
3 结果与分析
3.1 特征提取分析
3.1.1 高度特征分析 通常使用去除地形影响的冠层高度模型(CHM)表示林分自身冠层高度,CHM是通过DSM与数字高程模型(DEM)的差值计算获得的,其精度受DSM和DEM的精度影响。本研究区由于林分郁闭度大,林间地面点被林冠遮挡,仅利用无人机可见光遥感影像无法生成高精度的DEM,因此无法获得可用的CHM。DSM反映的高度特征除林分自身冠层高度外,还包含地形高度,在无法获得可用CHM的情况下,可以使用DSM表示高度特征。
为了确保生成的DSM精度满足林分类型分类精度要求,无人机可见光遥感数据采集时同步使用差分GPS获取4个地面控制点,实测控制点的高度和对应DSM如表3所示,DSM和实测高度误差均小于0.1 m,与各林分在高度分布上的差异相比可以忽略。统计样本高度如图3所示,可以发现阔叶林高度分布集中在304~336 m之间,平均高度326 m,最大值414 m,最小值295 m;针叶林高度分布集中在378~389 m之间,平均高度381 m,最大值403 m,最小值310 m;竹林高度分布集中在385~390 m之间,平均高度381 m,最大值409 m,最小值311 m;其他类别高度分布集中在289~324 m之间,平均高度315 m,最大值401 m,最小值280 m。由此可见,阔叶林和其他类别在高度分布上存在较大重叠部分,主要集中的高度区域远低于针叶林和竹林。针叶林和竹林在高度分布上较为一致。

表3 DSM精度Tab.3 DSM precision

图3 林分样本高度分布Fig.3 Height distribution of forest stand samples
3.1.2 植被指数提取分析 本研究共提取8个可见光植被指数,不同植被指数值的范围相差很大,将其归一化到0~1之间。统计各林分样本植被指数均值得到图4,可以看出不同植被指数对林分类型的区分程度不同,其中阔叶林区分度较高,针叶林和竹林难以区分。
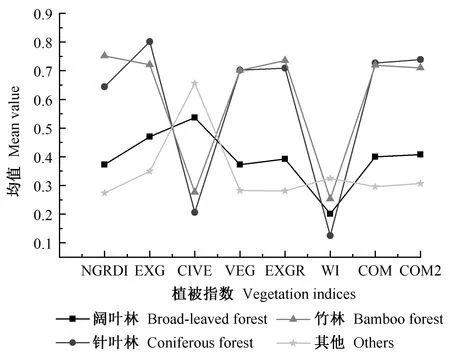
图4 各林分样本植被指数均值Fig.4 Mean vegetation index of each forest stand samples
3.1.3 纹理特征提取分析 样本平均J-M距离计算结果如图5所示。从图5a可以看出,当提取窗口大于19×19后,各林分类型的平均J-M距离均大于1.9,且趋于稳定,具有较高可分性,因此选择最佳纹理特征提取窗口为19×19。在窗口大小为19×19时,不同方向和步长下样本平均J-M距离如图5b所示,可以看出样本平均J-M距离变化较小,且没有哪些参数组合使得每个样本的平均J-M距离都是最大的。当步长为1、方向为45°时,针叶林和竹林的平均J-M距离最大,阔叶林和其他类别的平均J-M距离适中,选择窗口大小为19×19、步长为1、方向为45°作为最优的纹理特征提取参数。

图5 样本平均可分性Fig.5 Mean separability of samplesa.样本平均可分性随纹理尺度的变化Mean separability of samples with different scales texture;b.不同步长和方向下样本的平均可分离度Mean separability of samples with different distances and directions.
为了验证HSV颜色分量提取纹理的有效性,另提取窗口大小为3×3~19×19的RGB纹理特征,并单独利用这些特征进行随机森林分类,采用OA和Kappa系数进行精度评估。由图6可知,HSV纹理的分类精度优于RGB纹理的分类精度。

图6 不同窗口下HSV纹理与RGB纹理分类精度对比Fig.6 Comparison of classification accuracy between HSV texture and RGB texture under different window sizes
3.1.4 扩展的形态学多属性剖面提取分析 本研究在进行形态学属性剖面提取时使用4种滤波器,基于影像上各林分冠幅大小确定面积a的阈值集合为(5、9、61、115、171、325、1 027);标准差s阈值通过样本自动生成;对角线长度d和转动惯量i根据已有文献分别设置为(10、20、30、40、50、60、70、80、90)和(0.1、0.2、0.3、0.4、0.5、0.6、0.7、0.8、0.9)。共获得45个EAPa特征、15个EAPa特征、57个EAPd特征和57个EAPi特征。对每个EAP进行主成分分析,生成的EMAPs中分别包含EAPs前4个主成分、EAPs前5个主成分、EAPd前5个主成分和EAPi前13个主成分,维度为27。
3.1.5 特征选择结果 共选择66个特征用于林分类型分类,分别为3个原始光谱特征、DSM、8个植被指数、3个HSV颜色分量、24个HSV纹理特征和27个扩展的形态学多属性剖面。采用RF_RFE的特征选择结果如图7所示,其中总体精度和Kappa系数均为十折交叉验证的均值。

图7 采用递归特征消除随机森林算法的特征选择结果Fig.7 Feature selection using random forest_recursive feature elimination(RF_RFE)
从图7可以看出,当参与分类的特征数从1增加到11时,分类精度先上升后降低再上升,特征数为11时最高,继续增加特征,分类精度并无改善,因此选择前11个特征作为优选的特征子集。选择的特征按重要性从大到小的顺序为DSM、Hue_GLCM_Mean(色相纹理均值)、Sat_GLCM_Mean(饱和度纹理均值)、EAPa_PCA3(EAPa的第3主成分)、Val_GLCM_Correlation(亮度纹理相关性)、WI、Hue、EAPd_PCA5(EAPd的第5主成分)、EAPs_PCA2(EAPs的第2主成分)、EAPi_PCA11(EAPi的第11主成分)、EAPd_PCA3(EAPd的第3主成分)。
3.2 不同试验分类结果
本研究共设置8组对比试验,分类结果如图8所示。以人工目视解译方法绘制出的林分类型真实地面分布图为参考(图8i),从目视效果上看,试验1、3和4存在大量农田与林分混淆的情况,小碎块较多;试验2农田与林分区分较好,但是3种林分类型之间均混淆严重;试验5相比试验1农田与林分混淆的情况得到改善,但针叶林和竹林存在混淆;试验6、7、8在目视效果上较好,地块较完整,与地面参考影像较为接近。

图8 不同试验分类结果Fig.8 Classification results of different experiments
采用OA、Kappa系数、PA、UA和F统计值对各试验方案进行定量评价,如表4所示。从总体分类结果来看,试验1以原始三波段光谱特征进行林分类型分类识别,总体精度为65.68%,Kappa系数为0.53,分类精度低。试验2、3、4在试验1的基础上分别添加DSM、植被指数、HSV颜色分量,其中试验3的总体精度和Kappa系数略有下降,试验2和试验4的总体精度和Kappa系数提升不明显。试验5在试验1的基础上添加HSV纹理特征,分类精度大幅度提升,总体精度提升9.49%,Kappa系数提高0.12。试验6在试验1的基础上添加EMAPs,总体精度提升10.24%,Kappa系数提高0.13。试验7利用所有特征进行分类,相比光谱与其他特征单独结合使用分类精度要高,但是低于经过特征选择的试验8的精度。经过特征选择后总体精度和Kappa系数达到最高,分别为81.05%和0.73。

表4 分类精度统计Tab.4 The statistics of classification accuracy
从单个林分类型的漏分和错分以及分类精度来看,DSM在改善阔叶林漏分情况下加剧了错分,总体来说对阔叶林的分类提取是有益的,精度增加1.23%。HSV纹理特征在减少阔叶林错分时加剧了漏分,综合错分、漏分情况,精度提升5.7%。EMAPs对阔叶林的漏分和错分均有改善,精度提升9.54%。HSV颜色特征对阔叶林的错分和漏分没有明显影响。植被指数使阔叶林分类精度降低,错分、漏分情况均加重。综合所有特征和优选特征子集均可改善阔叶林的错分和漏分情况,使阔叶林的分类精度分别提升15.66%和15.89%。对针叶林来说,使用原始光谱信息错分情况最少,其他特征引入均使针叶林错分加剧,除DSM外,其他特征均可改善针叶林的漏分情况,光谱特征单独结合其他特征并不能提高针叶林的分类精度。综合所有特征进行分类时,虽然针叶林错分较多,但漏分明显改善,分类精度提升4.67%。特征优选子集在针叶林分类时漏分明显改善,分类精度提升2.14%。各特征均可改善竹林错分情况,HSV纹理和EMAPs可同时改善竹林漏分和错分情况,使竹林的分类精度分别提升15.16%和15.91%,其他特征虽然加剧了竹林的漏分情况,但总体上还是提高了分类精度。综合所有特征和优选特征子集均可以改善竹林的错分和漏分情况,分类精度分别提升18.99%和20.31%。
采用常见的Majority分析对8组试验结果进行分类后处理,以消除细小斑块,提高分类精度。设置变化核尺寸为15×15(约1株针叶树冠幅大小),中心像元权重为1。试验1、3、4分类结果中噪声较多,经分类后处理的总体精度分别提升3.25%、3.01%和3.26%;试验2、5、6分类结果中噪声相对较少,总体精度分别提升1.24%、1.98%和1.45%;试验7、8分类结果较为精确,小碎斑少,总体精度分别提升0.42%和0.38%。
3.3 不同分辨率影像分类结果
研究区使用的影像分辨率为0.1 m,鉴于林业部门获得的无人机可见光影像分辨率可能较粗,因此在较低分辨率影像上采用本研究方法进行试验,以验证方法的适用性。无人机可见光影像的分辨率基本上都优于0.5 m,将原始影像分别重采样成0.3 m和0.5 m分辨率,使用多特征优选方法进行分类(图9),均取得较好分类结果,总体精度均在80%以上,这说明本研究方法在较低分辨率影像上同样适用。当分辨率为0.3 m时精度最高,总体精度达82.46%,Kappa系数为0.75;当分辨率为0.5 m时精度较低,总体精度为80.48%,Kappa系数为0.72。各林分类型的分类精度如图10所示,分辨率为0.3 m时各林分类型分类精度均最高。当分辨率较高时(0.1 m),林分内部差异明显,同物异谱现象较严重,分类精度反而有所降低,当分辨率较低时(0.5 m),林分间的差异减小,出现异物同谱现象,也会使分类精度降低。同样对0.3 m和0.5 m分辨率的分类结果进行分类后处理,总体精度分别提升0.30%和0.43%。

图9 不同分辨率影像分类结果Fig.9 Classification results of different resolution image
4 讨论
本研究基于无人机获取的可见光遥感数据,充分发掘其潜在信息,对比不同特征对林分类型分类的影响,采用递归特征消除随机森林算法进行特征筛选,实现了阔叶林、针叶林和竹林的分类识别。该研究方法对无人机可见光数据在林业资源调查中的应用具有参考意义。分析本研究林分类型分类识别的流程和结果,认为影响林分类型分类识别精度的因素主要有以下几方面:
1)不同原始数据提取纹理特征影响林分类型分类结果。本研究在提取纹理特征时,考虑到原始光谱特征间存在一定相关性,提取的纹理特征间存在冗余,不利于林分类型分类识别,因此通过HSV色彩空间转换获得3个颜色分量进行纹理特征提取。经过试验对比发现,HSV纹理特征在林分类型分类识别上优于RGB纹理特征。
2)不同纹理提取窗口影响林分类型分类结果。不同窗口大小提取的纹理特征在林分类型分类识别时精度存在明显变化,因此本研究使用样本的平均J-M距离确定最佳纹理提取窗口,纹理窗口确定后,方向和步长设置对分类结果影响较小。
3)不同特征组合影响林分类型分类精度。以原始光谱特征为基础,单独引入其他特征对林分类型分类精度影响不同。其他特征均可提高竹林的分类精度而使针叶林的分类精度降低,DSM、HSV纹理和EMAPs可提高阔叶林的分类精度。综合所有特征和特征优选子集均可提高所有林分类型的分类精度。
4)在不同分辨率影像上使用多特征优选方法均可取得较好分类效果,但并不是影像分辨率越高分类精度就越高,分辨率较高或较粗均会降低分类精度。
5)利用分类后处理消除细小斑块,可在一定程度上提高分类精度。
另外,本研究还存在一些待改进的地方。采用递归特征消除随机森林算法优选的特征子集进行分类时虽然获得了最高分类精度,但还具有一定提升空间,未来可以考虑使用深度学习方法提高分类精度。
5 结论
针对目前无人机可见光遥感数据林分类型分类识别研究较少的现状,从原始数据中提取光谱、高度、植被指数、HSV颜色分量、HSV纹理以及扩展的形态学多属性剖面特征,采用递归特征消除随机森林算法筛选出最佳特征组合,使用随机森林分类器实现了阔叶林、针叶林和竹林的分类识别。主要结论如下:
1)单独使用无人机可见光遥感影像的光谱信息进行林分类型分类效果不理想,总体精度和各林分类型分类精度较低。以光谱特征为基础,单独引入不同类型特征,除植被指数外,其他特征均可提高总体分类精度,其中EMAPs和HSV纹理特征提升效果明显。
2)与单独使用光谱特征相比,综合所有特征进行分类,总体精度以及各林分类型分类精度均大幅提升,但高维的特征会使分类效率低,采用递归特征消除随机森林算法可有效筛选出最佳分类特征,在降维的同时提高分类精度。
3)本研究的创新之处在于使用无人机可见光遥感影像作为数据源,充分挖掘多类型特征中的有用信息实现林分类型分类识别,扩展了无人机可见光数据在森林资源调查中的应用范围。但本研究对象为阔叶林、针叶林和竹林3种类型,树种组成较为单一且研究区面积较小,有待于对范围更大、树种组成更加复杂的区域进行研究。
猜你喜欢
草业科学(2022年3期)2022-03-26
农业机械学报(2021年8期)2021-08-27
防护林科技(2020年6期)2020-08-12
软件(2020年3期)2020-04-20
绿色科技(2019年6期)2019-04-12
绿色科技(2019年6期)2019-04-12
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03
Coco薇(2015年5期)2016-03-29
安徽农学通报(2014年9期)2014-06-23
