
基于关联计算的相控阵雷达前视成像技术
2021-08-24 01:27李亚超
系统工程与电子技术 2021年9期
阮 锋,郭 亮,李亚超,许 然
(1.西安电子科技大学物理与光电工程学院,陕西 西安 710071;2.西安电子科技大学电子工程学院,陕西 西安 710071;3.北京电子工程总体研究所,北京 100076)
0 引 言
在不远的将来,空战面临的作战环境会越来越复杂,攻击的目标类型越来越丰富,目标特性越来越复杂,应用于导弹的末制导技术将向智能、精确、灵巧等方向发展,必须采用成像制导技术以满足末端对目标准确识别捕获及要害部位选择攻击的能力需求。早在20世纪80年代,美国国防部高级研究计划局就重点发展雷达成像,并列为高灵敏度制导技术重点项目,雷达成像已经成为新一代雷达导引头技术的重点发展方向之一。
对传统的合成孔径雷达成像而言,由于成像所需的多普勒差异[1]在雷达凝视或前视情况下不存在,所以要想将目标信息提取出来只能依赖实波束的功率差异,无法通过合成孔径的多普勒分析获取跨距离分辨能力,因此难以解决末端高精度打击及要害部位选择攻击的问题。而微波雷达关联成像则不依赖于多普勒效应,其成像原理是通过分析相控阵天线辐射的空时二维随机散射场与场景目标相互作用[2]产生的关联耦合,反演求解得到场景目标点散射系数,天线辐射场涨落的差异性是区分场景中目标分布信息的关键。
为了产生空时二维随机涨落[3]辐射场可以采用传统的基于相控阵移相器随机配相的方法,但是通过一阶关联成像算法得出的图像分辨率并不是很高,因为利用场的自相干函数对目标进行信息解耦[4]是关联处理的实质。由于场的随机涨落特性并没有充分发挥作用,故而这种方法与实波束成像没有什么区别。而采用结合压缩感知的稀疏求解方法,不仅可以拥有突破瑞利分辨极限的能力,而且只需要使用很少的采样数就可以恢复出目标图像。
这几年,激光遥感平台上已经成功应用基于稀疏重构的关联成像技术并且能够实现超瑞利分辨[5]。此外,为了实现高比率数据压缩[6],国外研究小组在微波超材料孔径天线上也利用这项技术并获得成功。受启发于这些成果并且基于关联计算的原理,本文提出了一种雷达前视成像的新方法,这种方法采用相控阵雷达,方便调控移相器来模拟经典关联成像中的散斑场,并利用压缩感知稀疏求解方法[7-10]使雷达成像的方位分辨力在常规实孔径阵列中的限制得以突破。对于前视关联成像的经典算法[11-14]——一阶关联处理算法虽然计算速度快,但是副瓣较高,成像质量较差,而本文提出的方法可以利用目标场景的稀疏性实现超分辨使成像效果提高。本文通过仿真实验验证了所提方法原理的正确性,并通过实测数据处理结果验证了算法的有效性。
1 基于压缩感知超分辨关联成像
1.1 微波关联成像信号模型
雷达发射天线发射的电磁波需要具有空时不相关性质[15],发射的电磁波在场景目标处散射后,接收天线接收后向电磁散射的目标回波。如图1所示,建立一个以发射天线上任意一点作为参考点O的坐标系,如果认为是很多个点源构成了天线的辐射口面,那么天线口径面上所有的点源在某处产生的场的叠加就可以和目标场景中某处的入射场一一对应,表示如下:
(1)
式中:rtx为发射天线口径面上的某任意位置;rT为目标场景任意一处;Etx(rtx,t)为发射天线口面;Atx为发射天线口面;t为时间。

图1 微波雷达关联成像工作示意图Fig.1 Schematic diagram of microwave radar correlation imaging
波传播的格林函数在自由空间中的表达式为
(2)
场景中的目标散射场与天线发射出的入射场的相互作用关系可以用场景的后向散射系数分布σ(rT)来描述(利用了一阶玻恩近似并忽略掉二次散射的影响),目标rT处的散射场可以表示为
Escat(rT,t)=σ(rT)Einc(rT,t)
(3)
只需要计算出目标场景中所有点的散射场在任意位置的叠加,就可以得到接收天线口径面上该处的辐射场(假设接收天线与发射天线完全隔离)
(4)
式中:S表示目标区域。其接收到的场为自身口面的矢量场叠加,因为接收天线工作时使用的接收辐射场是空时二维完全随机的,故其不具备空间分辨的能力,所以接收到的场可以表示为
(5)
式中:Arx(rT,t)为接收天线口面。
从之前推导可以看出,Einc(rT,t)实际上就是发射天线在rT处的辐射方向图。而对于接收天线来说,在rT处的接收方向图(rT处的散射场为单位1时)表示为
(6)
将Einc(rT,t)和Erec(rT,t)代入式(5)得
(7)
式中:F(rT,t)为等效的双程天线辐射方向图函数。
如果天线发射和接收的两个辐射场方向图中同时或者其中任意一个辐射场方向图具有空时二维的随机特性,那么这种空时二维的不相干性也同样存在于其等效的双程方向图中。
(8)

然后,令天线接收到的场与等效双程天线辐射场进行一阶关联,有:
(9)
通过上面的表达式,可以推导出目标后向散射特性分布:
(10)
上述推导过程即是利用一阶矢量场进行经典关联成像的方法,包含了从相控阵天线辐射具有空时二维随机特性的信号,入射场与场景中的目标散射点相互作用,直到具有空时二维随机特性散射场被相控阵天线接收的整个物理过程。
1.2 压缩感知框架下的超分辨成像模型
为了模拟经典强度关联成像中的随机涨落散斑场,采用二维相控阵雷达制造伪随机赋形波束的方法来产生随机涨落的雷达天线辐射场[16]。
目标与随机辐射场之间的作用以及接收机的回波接收过程,从另一个方向去看可以认为是空间波阵面的随机编码决定了随机场的差异。被接收的散射回波是场与目标之间的相互作用产生的。该过程是使用这组随机分布的字段等效于采样基空间的代码来完成对目标分布的随机采样。解码过程就是使用已知的场分布来反演目标的散射系数。压缩感知中的采样理论[17-21]就是这个过程。在压缩感知理论中,想要很好地恢复原始信号并不需要以高于(甚至可以远低于)奈奎斯特采样定理所需的采样频率对信号进行采样,而实现这一目标只需要满足原始信号的稀疏性和测量的非相关性,并有突破瑞利极限的能力[22-28]。
确定了信号的采样矩阵之后就可以实现基于压缩感知框架的超分辨关联成像。如果忽略场景中不同目标点与收发天线的微小距离差别,即远场平面波条件下的等效天线辐射方向图F(rT,t)可以表示为F(θT,βT,t),其中θT为方位角,βT为俯仰角,结合式(7)得到此时的接收场为
(11)
将目标场景与方向图离散化,得到

(12)

相控阵调制出来的随机场在空间维度上具有相当高的关联性,这是因为孔径尺寸限制了这一点,从而导致采样矩阵F是个非满秩矩阵,其有效方程个数小于P,即求解Erx=Fσ是一个欠定问题。而压缩感知解决的正是欠采样问题[29-34]。因此,在原来的线性问题上加入一个正则化的约束,将之前的欠采样问题转化为如下的非线性优化问题:
(13)
可以通过拟牛顿算法[23]对上式进行求解,而考虑工程化的易实现性,在仿真和工程化中采用稀疏贝叶斯学习算法进行处理,得到超分辨成像结果。
2 微波关联计算成像试验验证
2.1 前视三维雷达关联成像原理
相控阵随机馈相形成的随机天线辐射场F(θT,βT,t)在各个距离波前平面上一致,可以把很多距离相等的波前平面记为多个的距离单元,虽然在不同的距离单元里电磁波的衰减程度不同,但是在同一个距离单元内,电磁波的衰减程度是一样的,即距离衰减因子在同一个距离单元内是一个复常数,所以在同一个距离单元内,可以利用随机辐射场的不相关性,对该距离单元内所有目标运用稀疏求解的方法进行二维超分辨解耦,从而提取目标散射信息。利用宽带信号的特性,可以把不同距离的波前平面划分成一个个的距离单元,而在每一个距离单元上都可以分析出一幅二维剖面图,可以按照一定顺序(比如沿雷达视线方向)将这一系列的图像拼接起来,这样就可以得到一个完整的三维图像了。如果采用的拼接顺序与天线法向一致,那么就可得到雷达前视三维图像[35],如图2所示。

图2 前视三维成像示意图Fig.2 Diagram of forward-looking three dimensional imaging
2.2 关联前视成像仿真与实测数据处理分析
利用上述前视三维雷达成像原理,对仿真数据进行成像。成像仿真实验使用的场景如图3(a)所示,在场景中心平面上,沿X和Y方向上间距为10 m和坐标原点处分布了5个点,而沿Z轴方向(雷达视线方向)的3个点间距为5 m,带宽B为100 MHz,场景中心距离Rs为1 km,脉冲重复周期为16 kHz,脉冲宽度Tp为6 μs,阵列长度D为0.32 m,并在回波数据中加入高斯白噪声以改变信噪比。理论上,发射信号带宽和相控阵天线孔径大小决定了实孔径三维成像分辨率。根据仿真实验所设定参数,距离向分辨率为1.5 m,X方向和Y方向分辨率均为53.57 m,而仿真实验中场景的点目标空间间隔只有10 m,远小于上述X与Y方向的理论最小可分辨距离。如图3(b)所示的实孔径扫描成像结果,无法分辨出中心参考距离面上的散射点。
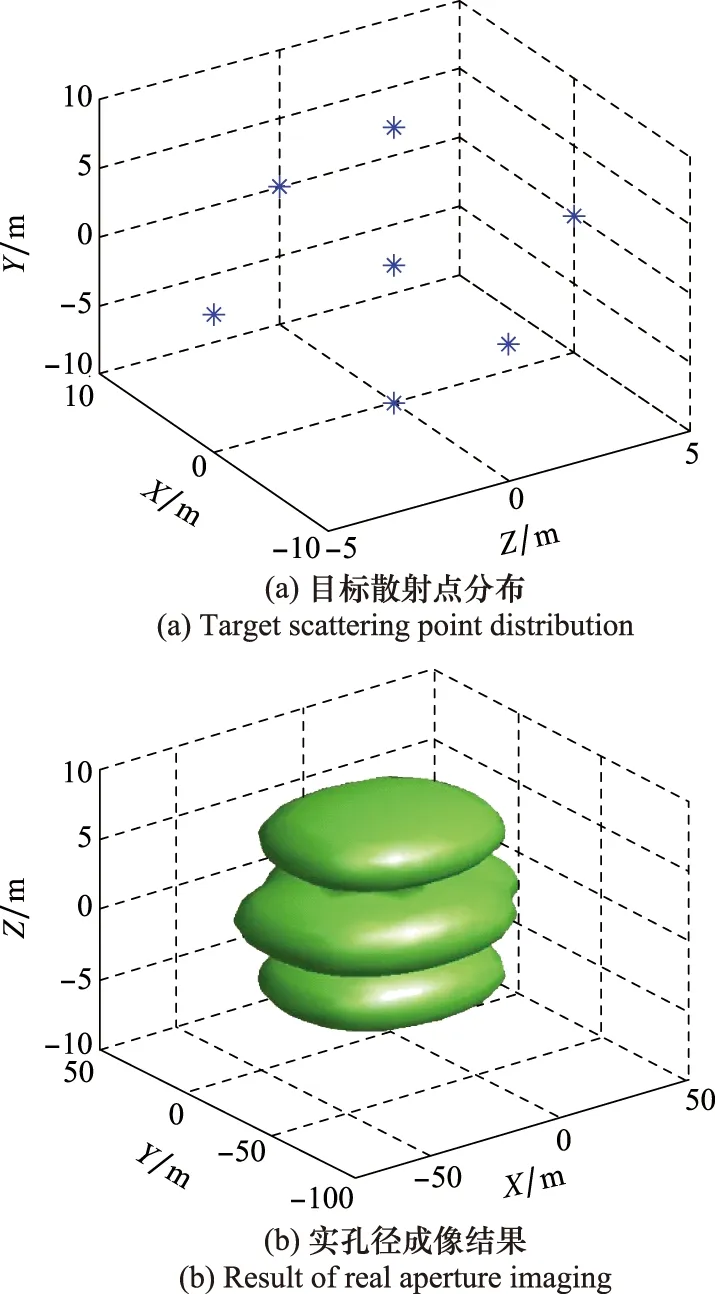
图3 目标散射点分布与实孔径成像结果Fig.3 Result of target scattering point distribution and real aperture imaging
基于稀疏重构的三维超分辨成像结果如图4所示,脉冲次数是80。可以有效地分辨常规实孔径方法无法区分的散射点,散射点噪声和旁瓣都得到有效抑制,且位置估计准确。
为了进一步验证关联成像原理可行性,利用相控阵雷达进行外场成像试验验证,如图5与图6所示。目标场景中布置有4个反射体,1号反射体与雷达的距离为324 m;2号、3号和4号反射体与雷达的距离为405 m。试验中距离向分辨率为20 m,其中400 m距离处方位波束横向覆盖约17 m,方位波束宽度为2.5°。成像场景设3种,反射体2、3与4号的距离R依次为17 m、8 m和4 m,最终成像结果如图7所示。
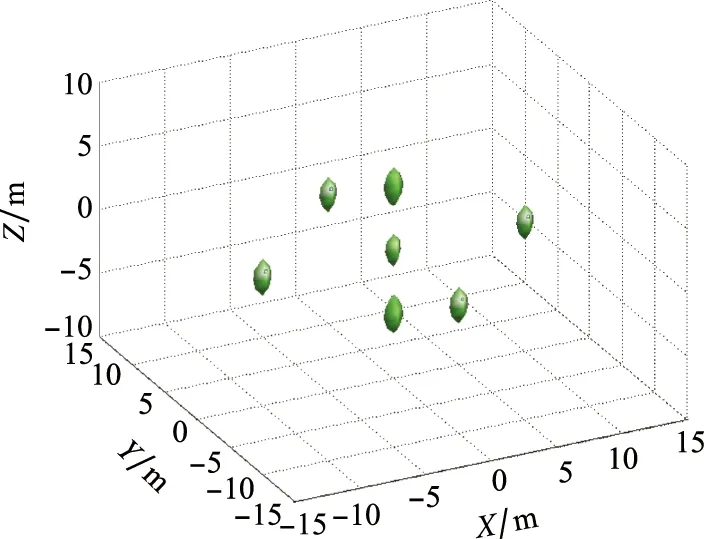
图4 前视三维超分辨成像结果Fig.4 Result of forward-looking three-dimensional super resolution imaging

图5 成像场景Fig.5 Imaging scene
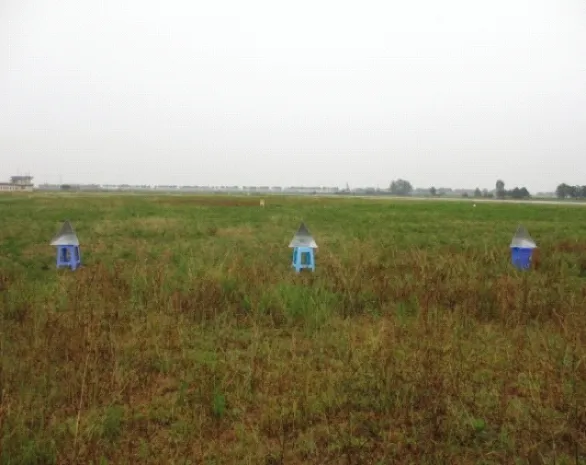
图6 目标场景Fig.6 Target scene

图7 前视静态试验成像结果Fig.7 Result of forward-looking static test imaging
可以看出,成像结果精准体现出了场景中几个比较明显目标的位置,但图像并不能展现出目标更为精细的几何轮廓,因为场景中目标散射特性比较复杂而且成像分辨率不足,还有较多虚假点。当反射体2号、3号与4号的距离R变小时,目标依然能够体现出来,但是随着R变小,虚假点也在逐步增多,可能是由于有源相控阵天线幅相调节误差和稀疏重构算法本身的缺陷导致了虚假点数目变多。总体而言,该实验验证了前视关联成像原理的可行性,但针对复杂场景的高分辨成像性能及算法优化工作还需要进一步研究。
按照给出的仿真参数,理论上的分辨率应该为
(14)
式中:λ为信号波长;Rs为雷达与场景中心的距离;D为雷达孔径长度。从图7的成像结果来看,图7(a)可以分辨距离为17 m的物体,实现了1.176倍超分辨;图7(b)可以分辨距离为8 m的物体,实现了2.5倍超分辨;图7(c)可以分辨距离为4 m的物体,实现了5倍超分辨。故本方法至少可以实现5倍超瑞利极限分辨率。
3 结 论
基于关联计算的原理,本文提出了一种适用于相控阵雷达的前视成像方法,模拟经典关联成像中随机场的方法是模拟出随机电磁辐射场,而这个辐射场是通过控制移相器实现随机相移来产生的,最后求解目标场景中的散射系数利用了稀疏求解的方法,得到的结果即为成像结果。成像结果可以使方位分辨率突破常规实孔径阵列雷达的限制,并将这种关联技术推广到前视三维成像中。虽然该方法可以实现超分辨,但是仍然有许多限制条件,比如相控阵的尺寸和自由度。故而进一步提高到10倍以上量级的超分辨是很艰难的,只有寻找到突破尺寸限制的辐射场随机调制方法才有可能进一步提高超分辨的倍数。另外,由于成像分辨率在压缩感知框架下没有解析表达式指导系统设计,故只能通过实验来尝试测量其分辨率的大小。算法方面,也有很多亟待解决的问题,例如如何适应复杂场景的环境、如何不过分依赖场景的稀疏先验信息和如何自动选取正则化参数等,这些问题都需要后续做进一步深入研究。
猜你喜欢
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
数学物理学报(2019年3期)2019-07-23
电子制作(2019年24期)2019-02-23
家庭影院技术(2018年9期)2018-11-02
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
雷达学报(2017年1期)2017-05-17
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
光学精密工程(2016年1期)2016-11-07
