
可升降水果采摘装置的设计
2021-08-26 02:50王旖旎李逢振吴玉红
中国新技术新产品 2021年10期
王旖旎 李逢振 吴玉红
(湖南环境生物职业技术学院,湖南 衡阳 421005)
0 前言
随着生活水平的提高,水果已经成为人们日常生活必不可少的食品。现在的水果一般都在园中大量种植,一到成熟收获的季节,水果采摘也就成了人们最常见也较繁重的劳作方式之一。除了部分水果可通过人工方法降低树高易采摘外,还有相当部分水果生长在较高的树上。水果生长的自然位置高,不利于人工直接采摘,很多时候免不了使用梯子或人爬上果树后用手摘取[1-2],这种采摘水果的方式,可以最大限度地降低水果的破损率[4],但是对于作业人员来说存在很大的安全隐患,而且采摘强度较大,采摘效率较低。因此水果采摘技术越来越受到人们普遍关注,尤其是高空采摘,采摘设备具有极大的市场需求。就目前上市的采摘设备来看,有以下几个优点:1)便携式采摘器能完成水果摘取,但不具备果实采摘完后进行传输的装置,作业过程仍需大量体力,且采摘距离也受限制。2)组合式采摘器可对各种角度、不同距离的水果进行采摘。但是,最后在水果收集时,速度缓慢,且不能保证水果不被碰伤,同时结构较复杂,不便携带和操作。3)采摘机器人适应各种高度,效率也高,但价格昂贵,不易维修和保养。4)大型采摘装置笨重,移动、存放较困难,成本高,采摘时水果表皮易被碰伤。
为此,通过研究创新,该文设计了一种可升降水果采摘装置,安全、经济、高效、方便[7]。
1 可升降的水果采摘装置的设计
1.1 总体结构设计
根据高空采摘设备操作简单、轻巧方便的特点,采用伸缩杆为主体,配以重量轻、抓取范围可调的夹头,实现不同高度和不同大小水果的采摘。该文设计的可升降水果采摘装置如图1、图2所示,主要包括夹头、伸缩杆、握杆和转杆等4个部分。伸缩杆通过螺纹连接方式套设在握杆内部,伸缩杆和握杆内部设置有转杆,转杆上端连接夹头,下端与握杆连接。
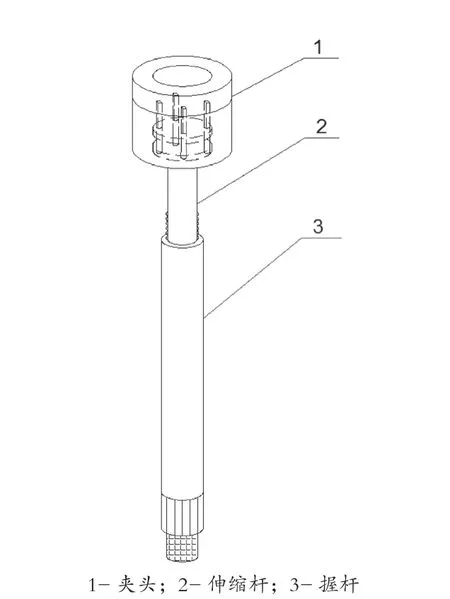
图1 可升降水果采摘器的立体图

图2 可升降水果采摘器的剖视图
1.2 关键部件设计
1.2.1 握杆的设计
如图3所示,握杆是水果采摘装置的握持部,位于装置中下部,包括固定杆和活动杆,固定杆与活动杆之间通过轴承连接。
握杆设置成空心结构,内有伸缩杆和转杆。采摘水果时,作业人员通过握住固定杆,用手转动活动杆,即可带动转杆转动,进行水果采摘作业。
固定杆和活动杆外表面均设置有橡胶垫,能够在工作时起到防滑作用。
1.2.2 伸缩杆的设计
伸缩杆在高空采摘作业时起着关键性的作用。它通过螺纹连接方式套设在握杆内部,如图3所示。在采摘过程中针对不同的采摘高度,先旋转伸缩杆,使得伸缩杆沿着握杆纵向移动,第一转杆在夹头的带动下,沿着第二转杆纵向移动,这种结构的设置能够使得采摘装置任意伸长或者缩短,从而适应不同的采摘高度,将水果从树上取下。

图3 伸缩杆和握杆的剖视图
1.2.3 转杆的设计
伸缩杆和握杆内部设置有转杆。转杆上部连接夹头,下部与握杆连接,在握杆的带动下能够转动,并且带动夹头内的相关齿轮转动。
转杆包括第一转杆和第二转杆。第一转杆下部呈矩形体,上部外表呈圆柱体,内孔呈矩形体。第二转杆两端呈矩形体,中部呈圆柱体。
第二转杆活动套设在第一转杆内部,可随时跟着伸缩杆的伸缩上下移动,以适应不同的采摘高度。
第二转杆与夹头内部的第二齿轮和第三齿轮固定连接,第二转杆一转动,第二齿轮和第三齿轮跟着转动,2个齿轮起着主动轮的作用。
第一转杆与握杆下方的活动杆固定相接,活动杆一转动,第一转杆跟着转动,带动相连的第二转杆转动。
1.2.4 夹头的设计
夹头是水果采摘装置的核心部件。其结构如图4所示,包括夹头壳体、第三齿轮、第二齿轮、传动杆、齿杆和刀片。

图4 夹头的结构图
夹头壳体是一个空心圆柱体,第三齿轮、第二齿轮、传动杆、齿杆和刀片均安装在其内部。
第三齿轮在夹头壳体底部位置,被第二转杆穿过。
第二齿轮位于第三齿轮上端。第二齿轮与第二转杆、第三齿轮和第二齿轮上前后左右4个位置,分别贯穿有活动杆,如图7所示。活动杆上端呈矩形体,能够用来夹紧水果。下端呈圆柱体,当第三齿轮和第二齿轮转动时,活动杆能够向圆心位置移动。

图7 活动杆的结构示意图
第二齿轮和第三齿轮上均设置有轨道105a,如图6所示。其中轨道设置有4个,分别位于第二齿轮和第三齿轮前后左右4个位置,轨道一端靠近第二齿轮和第三齿轮边缘,另一端靠近圆心位置。轨道呈弧形,其中活动杆穿过轨道。
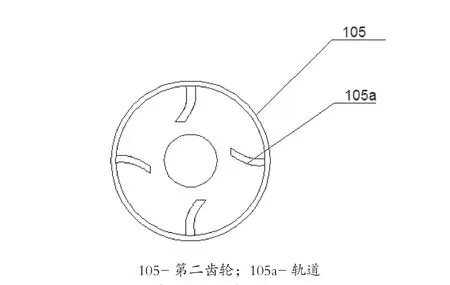
图6 第二齿轮和第三齿轮的俯视图
第二齿轮和第三齿轮在转动时,能够带动活动杆沿着弧形轨道由边缘向中间移动,从而调节抓取范围,适应不同尺寸大小的水果,抓取并夹紧水果。
传动杆有2根,分别位于第二齿轮左右两端,且传动杆上下两端均连接有第一齿轮,下端的第一齿轮与第二齿轮啮合,上端的第一齿与齿杆啮合。
齿杆一侧设置有齿,且有齿一端与第一齿轮啮合。齿杆设置有2个,分别滑动安装在夹头壳体上端,2个齿杆之间固定连接有刀片,如图5所示。
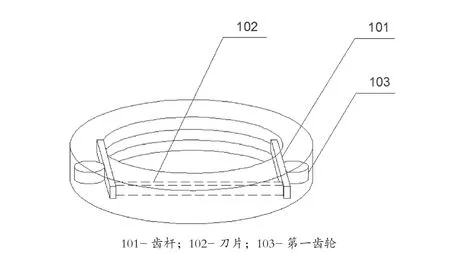
图5 刀片安装结构图
采用以上结构,当采摘水果时,在切断水果与果树连接的同时,还能将水果夹紧,防止水果落地造成损伤,有效地保证水果的完好率。基于高空采摘作业,该水果采摘装置要满足整体结构轻便,避免头重脚轻,同时又不遮挡操作者的视线等要求。各部分的选材也很重要,尽量采用轻质材料制成。夹头壳体采用透明的的亚克力板或其他透明塑料材质制作,夹持元件(活动杆)采用密度较轻的塑料材质制成。为了防止活动杆抓取水果时破坏水果表皮,在活动杆内侧可增加一层薄橡胶垫。伸缩杆和握杆的固定杆均采用1mm厚304不锈钢管做成,中间空心可以减轻重量,使操作者在采摘水果时不易产生疲劳,降低了劳动强度,同时也方便携带。握杆的活动杆和转杆均由304不锈圆钢做成,这样既美观又实用。
1.3 工作原理
使用该装置采摘水果时,先根据水果所在高度,旋转伸缩杆,使得采摘装置处于一个合适的长度,然后对准需要采摘的水果,将水果套在夹头内部。
紧接着转动活动杆,此时转杆跟着转动。当第三齿轮和第二齿轮在第二转杆的带动下转动时,带动4个活动杆由外向中间移动,从而抓取并夹紧水果。与此同时,第二齿轮带动传动杆下端的第一齿轮转动,第一齿轮再通过传动杆进一步带动传动杆上端的第一齿轮转动,与第一齿轮啮合的齿杆再带动刀片在水平方向上前后移动,从而切断水果与果树之间的连接,进行水果的采摘作业。
2 产品特色
与现有采摘技术相比,该水果采摘装置具有以下特色:1)采摘水果时将水果套在夹头内,在刀片切断水果与果树之间联系的同时,通过夹头内的活动杆将水果夹住,实现夹紧与切断同时操作,从而可以防止水果掉落地面造成损伤,在一定程度上保证了水果的完好率,提高了经济效益。2)设置伸缩杆[6,8],并且将伸缩杆与握杆之间通过螺纹连接,使得采摘装置在采摘不同高度的水果时,都能够极其方便、灵活,既保证了作业人员的安全[5],又降低了劳动强度[8]。3)完全利用机械传动进行水果采摘,结构设计简单[2],携带操作方便[3],节省了时间,提高了效率。4)装置各部分用材合理,整体舒适美观。
3 结论
水果采摘是一个季节性较强的工作。为了满足水果种植户的需求,该文针对当前水果高空采摘这一技术难题,该文设计的可升降水果采摘装置结构简单,携带操作方便,果园、山地、丘陵等多种环境生长的高大乔木水果树,且采摘单果个头较大的硬质水果时都能适用。使用该水果采摘装置既能降低采摘人员的劳动强度,避免安全事故,提高采摘效率,又能保证水果完好率,提高经济效益,具有很好的实用意义。经预测,其应用市场和推广前景广阔。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
一重技术(2021年5期)2022-01-18
重型机械(2020年3期)2020-08-24
物流技术与应用(2020年4期)2020-05-06
制造技术与机床(2018年10期)2018-10-13
中国自行车(2018年8期)2018-09-26
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年2期)2017-05-04
工程建设与设计(2016年4期)2016-02-27
现代冶金(2015年4期)2015-02-06
