
SMA弹簧驱动的柔性操控臂动力学分析
2021-09-02 06:10滕亚军陈务军杨天洋敬忠良刘物己
上海交通大学学报 2021年8期
滕亚军,陈务军,杨天洋,敬忠良,刘物己
(上海交通大学 a.空间结构研究中心;b.航空航天学院,上海 200240)
与由电机驱动的机器人相比,由智能材料[1-2]驱动的柔性机器人具有灵活性好、体积小、质量轻、环境适应性好、噪声低等优势.柔性机器人对工作条件受限的环境具有良好的适应能力,可广泛用于家庭服务、灾难救护、教育娱乐、医学和太空探索等许多领域,在未来这些应用领域中将会占有十分重要的地位.柔性机器人一般采用气动、离子交换聚合物、形状记忆合金(SMA)[3-5]、形状记忆聚合物[6]、响应水凝胶[7-8]等驱动方式并由柔性材料来做支撑结构.McMahan等[9]研制出一种仿章鱼触手的连续型机器人OctArm,该机器人可以抓取形状复杂的物体,并且可以在相对受限的工作环境下运动.韩国汉阳大学Choi等[10]设计研制出一种弹簧骨架支撑的连续型内窥镜机器人.该机器人通过弹簧支架支撑,弹簧支架的作用是保持机器人的形状和为弯曲运动提供弯曲刚度的作用,其运动通过柔性臂内部的3根驱动绳索协调运动而实现.哈尔滨工业大学的胡海燕等[11]研制出的机器人用于结肠镜检查,此连续机器人通过NiTi合金丝驱动线驱动两个机器人单元,可实现平面与空间内弯曲.
准确的运动学和动力学分析对于理解机器人的机理和控制至关重要.常规的建模方法有牛顿-欧拉法[12-13]和拉格朗日动力学方法[14-15].拉格朗日动力学方程是基于机械系统能量对系统变量(位移、速度等)以及时间的微分所建立的.在机械系统结构比较简单、自由度比较少的情况下,拉格朗日方程法可能会比牛顿-欧拉方程法复杂,但是随着机械系统越来越复杂、自由度越来越多,用拉格朗日方程法对机械系统进行动力学建模与分析变得比牛顿-欧拉方程法更加简单.丁希仑等[16]提出一种多连杆复杂的柔性臂系统动力学建模方法——D -Holzer法,用该法推导了两连杆柔性臂系统的动力学模型.但由于空间柔性操控臂采用形状记忆合金弹簧驱动,且SMA具有很强的非线性,导致机构的动力学方程推导和求解变得较为复杂.前人的文献研究并无带有SMA弹簧的动力学研究,导致对使用SMA弹簧驱动的软体机器人动力学分析没有足够的了解.
本文以八面体桁架为理论基础,设计一种基于SMA弹簧驱动的柔性驱动模块.基于拉格朗日动力学建模方法,并结合SMA弹簧的本构模型获得动力学普遍方程.通过Adams仿真,计算出关节转动角度与SMA弹簧长度.通过算例分析SMA弹簧在不同关节转动下的动力响应,为后续SMA弹簧控制和柔性操控臂的实验研究奠定基础.
1 空间柔性操控臂结构设计
结合串联机构与并联机构各自的优点,贾林睿等[17]设计了一种八面体单元组成的变几何桁架式机构,具有高刚度以及大运动空间的特点.八面体桁架是由多个正八面体桁架结构组成,相邻两节呈对称关系.以相邻的两个正八面体的共用面作为驱动面,通过主动驱动器改变驱动面3根杆件的长度以实现结构几何的形状改变.
通过改变驱动面与驱动方式,提出如图1所示的柔性操控臂模块.柔性臂主结构由光敏树脂3D打印而成,每个柔性臂主结构有3个分支以120° 间隔圆周分布.上部分主结构绕球铰O点转动.每个分支末端有设计好的小孔,将SMA弹簧嵌入对应的小孔中,柔性操控臂单元有6根SMA弹簧.

图1 柔性操控臂模块Fig.1 Flexible manipulator unit
柔性操控臂模块仍为八面体结构,SMA弹簧侧面驱动.通过改变SMA弹簧的温度来控制SMA弹簧长度,从而驱动结构转动.
2 动力学分析
拉格朗日力学在处理力学体系时,将力学体系作为一个整体考虑,由力学体系的特征选定广义坐标并写出系统总的动能Ek、势能V及拉格朗日函数L=Ek-V.拉格朗日函数包含了力学体系的所有信息,包括约束、运动状态、能量、相互作用等,是十分重要的物理量.拉格朗日方程组具有约束越多,方程组个数越少的优点.拉格朗日方程的建立步骤固定,所有系统都具有统一简单的形式,力学体系的不同归结为拉格朗日函数的不同,因而容易掌握且不易出错,即拉格朗日力学在建立方程过程中具有“整体”、“分析”和“标量”的特点.拉格朗日法不仅能以最简单的形式求得非常复杂的系统动力学方程,而且具有显式结构.本节将采用拉格朗日法推导相应的动力学方程,分析柔性操控臂的动力学特性.

图2 柔性臂坐标系Fig.2 Coordinate system of flexible manipulator
2.1 运动学
所建立的柔性臂坐标系如图2所示.其中:Ot为上部结构的中点;OB为底部结构的中点;y轴与OtS1平行,z轴与主干OOt的中心线重合,x轴垂直与平面yOz;S1、S2、S3为顶部的3个弹簧连接点;B1、B2、B3为底部的3个弹簧连接点;l1~l6为6根弹簧的长度.
运动学假设:
(1)忽略主结构的变形.
(2)圆盘的转动由SMA弹簧引起.
假设SMA弹簧连接点S1、S2、S3、B1、B2、B3的坐标向量为
(1)
(2)
式中:θB为底部的天顶角;rB为底部结构半径;θ1、θ2、θ3为顶部天顶角;φ1、φ2、φ3为顶部方位角;rt为上部结构半径.
假设绕x轴的旋转矩阵为Rx,绕y轴的旋转矩阵为Ry,绕z轴的旋转矩阵为Rz:
(3)
式中:α、β、γ为转动角度.
S1点旋转后的坐标为S1r,S2旋转后的坐标为S2r,S3旋转后的坐标为S3r.旋转后的坐标向量可表示为
(4)
SMA弹簧长度与旋转后的θir与φir(i=1,2,3)的关系为


(5)

(6)


(7)
(8)
(9)

(10)
2.2 势能与动能
在柔性操控臂初始位置,上圆盘的质心坐标为Oc=[xcyczc]T.柔性臂转动后的质心Ocr=[xcrycrzcr]T可表示为
(11)
重力势能VG以及SMA的弹簧势能VS可分别表示为
(12)
式中:Fj为SMA弹簧力;mt为上部结构的质量;g为重力加速度;Δ为SMA弹簧的变形量.
1986年,Tanaka[18]根据SMA在相变过程中自由能应该达到最小值的原理建立了SMA本构模型,用能量平衡方程和Clausius-Duhem非平衡热力学原理描述了其超弹性和记忆性能.文献[18]假定相变过程中,马氏体体积分数与温度间成指数关系.根据SMA自由回复过程中的变形特征,Liang等[19-20]用余弦函数来表示马氏体体积分数和温度、应力之间的关系,关系式包括了马氏体正逆相变全过程.后来在Brinson[21]所提出的模型中,将马氏体变体分为两部分,温度诱发相变和应力诱发相变,因此马氏体相变动力学方程在不同温度区间有正反两个演化方程,这样记忆合金超弹性本构关系的基本框架得到了建立.
根据Brinson[21]提出的形状记忆合金一维本构模型,利用拉伸应力、拉伸应变和剪切应力、剪应变之间的等效关系,进行修正后再结合普通弹簧理论,获得由SMA弹簧的本构模型[22]:
(13)
E(ξ)=EA+(EM-EA)ξ
(14)
Θ(ξ)=ΘA+(ΘM-ΘA)ξ
(15)
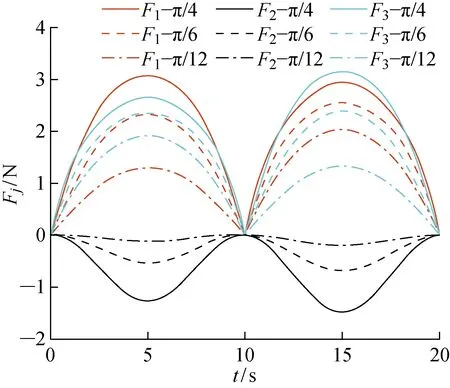
j=1,2,…,6

从奥氏体转换为马氏体:

(16)
(17)

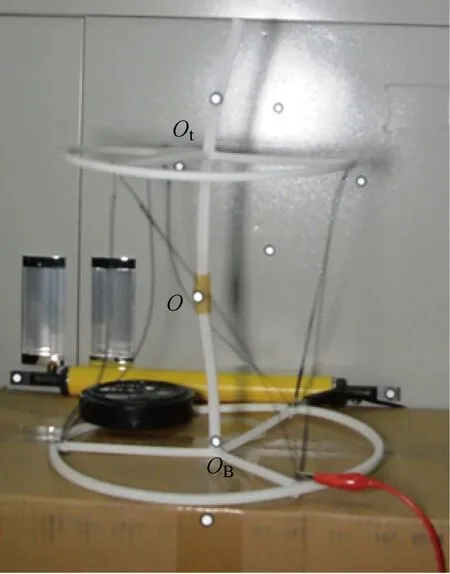
(18)
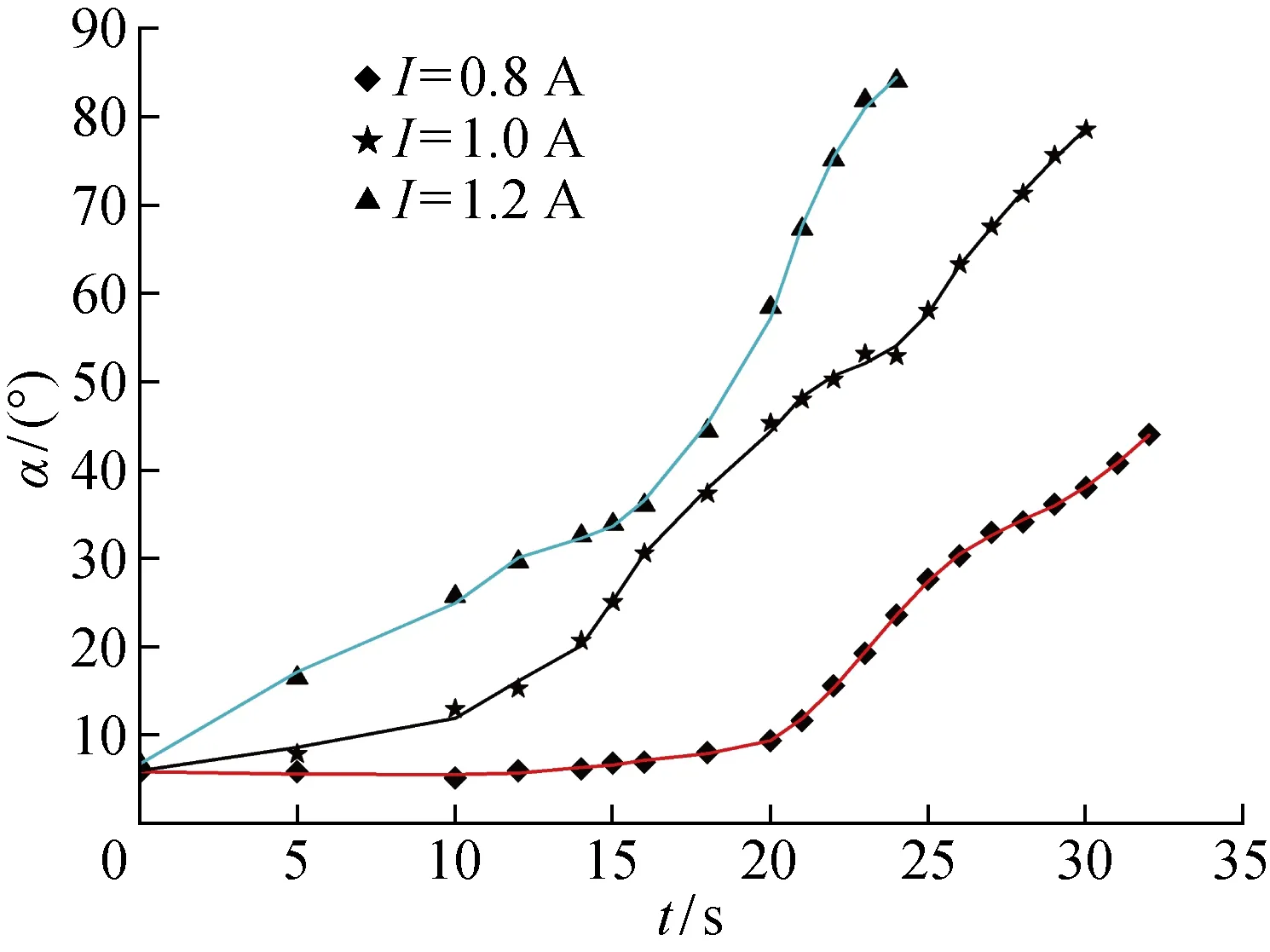
(19)
当TMf (20) ΔTξ=0 (21) 从马氏体转换为奥氏体: (22) (23) (24) aM=π/(TMs-TMf),aA=π/(TAf-TAs) (25) 机构总动能可表示为 (26) 以α、β、γ为广义坐标,令q1=α,q2=β,q3=γ;拉格朗日动力学方程为 L=Ek-(VS+VG) (27) (28) m=1,2,3 (29) 将动能与势能代入拉格朗日动力学方程,得到矩阵形式: (30) 2.4.1理论计算 已知关节转动角度的变化,可表示为 (31) 式中:Ψ为最大转动角度.机构的建模参数如表1所示,SMA弹簧材料参数如表2所示. 表1 建模参数Tab.1 Modeling parameters 表2 SMA弹簧材料参数Tab.2 Material parameters of SMA spring 图3 当时的柔性臂运动形态Fig.3 Kinematic forms of flexible manipulator at 图4 计算流程图Fig.4 Flowchart of calculation 通过计算,6根SMA弹簧长度li与时间t的关系如图5所示.当SMA弹簧长度小于初始长度时,表示该SMA弹簧需要通电. (1)当t=0~10 s时,对SMA弹簧l3、l6通电,其余SMA弹簧l1、l2、l4、l5被动拉伸.SMA弹簧l3、l6上的力是由通电后马氏体向奥氏体相变而来的,SMA弹簧l1、l2、l4、l5上的力是被动拉伸而产生的. (2)当t=10~20 s时,对SMA弹簧l1、l5通电,其余弹簧l2、l3、l4、l6被动拉伸.SMA弹簧l1、l5上的力是由通电后马氏体向奥氏体相变而来的,SMA弹簧l2、l3、l4、l6上的力是被动拉伸而产生的. (3)6根SMA弹簧的初始长度都为258.6 mm.在运动过程中,SMA弹簧长度最大值为303.6 mm,最小值为186.8 mm. SMA弹簧li上的弹簧力为Fj,SMA弹簧力F与时间t的关系如图6所示. (1)SMA弹簧l1、l3、l5、l6承受拉力,SMA弹簧l2、l4承受压力.当拉力与压力最大值出现在5 s和15 s时,拉力最大值为3.1 N,压力最大值为 -1.5 N. 图5 当Ψ=π/4时的SMA弹簧长度Fig.5 Lengths of SMA spring at Ψ=π/4 图6 当Ψ=π/4时的SMA弹簧力Fig.6 SMA spring forces at Ψ=π/4 (2)为了方便后面进行Adams仿真计算,将理论计算出的力拟合. 当t=0~10 s时, F3=-7.738+3.727cos(0.261 6t)+ 14.29sin(0.261 6t)+4.742cos(0.523 2t)-2.653sin(0.523 2t)-0.729 4cos(0.784 8t)-0.7595sin(0.784 8t) (32) 当t=10~20 s时, F1=-7.699-10.03cos(0.265 3t)- 11.15sin(0.265 3t)+0.575cos(0.530 6t)-5.393sin(0.530 6t)+0.867 3cos(0.795 9t)-0.627 2sin(0.795 9t) (33) 图7 当Ψ=π/4时的l3、l6马氏体体积分数Fig.7 Martensite volumn fractions of l3 and l6 at Ψ=π/4 图8 Ψ=π/4,π/6,π/12时SMA弹簧力Fig.8 SMA spring forces at Ψ=π/4,π/6,and π/12 由图5和6可以看出,通电SMA弹簧任意时刻的弹簧长度与弹簧力.通过SMA弹簧力与弹簧长度,根据SMA弹簧的本构模型(见式(13)和(14)),可以计算出SMA弹簧的马氏体体积分数.可以得到在t=0~10 s时,SMA弹簧l3、l6马氏体体积分数ξ与时间t的关系如图7所示.马氏体体积分数最小值出现在t=5 s时,其值为0.74. 当Ψ=π/4、π/6、π/12时,SMA弹簧力Fj与时间t的关系如图8所示.其中,由于机构的对称性,F1=F5,F2=F4,F3=F6,此处只列出F1~F3的受力情况.由图8可以看出,当Ψ增大时,SMA弹簧力也需要随之增大.SMA弹簧力的最大值Fmax与最小值Fmin如表3所示. 表3 SMA弹簧力最大值Tab.3 Maximum forces of SMA spring 2.4.2Adams模拟 为验证理论计算的正确性,采用Adams进行仿真计算.Adams仿真计算流程图如图9所示.由于SMA弹簧建模的困难,将理论计算出的SMA弹簧力施加到SMA弹簧上,从而带动结构转动.通过比较转动角度与SMA弹簧长度验证理论模型的正确性. 图9 Adams仿真计算流程图Fig.9 Flowchart of Adams simulation 仿真与理论中的转动角度α与时间t的关系如图10所示,SMA弹簧长度与时间t的关系如图11所示.仿真得到的转动角度最大值与最小值分别为49.5° 与 -41.6°,与理论计算相差9%与7.5%.对于SMA弹簧长度l1、l2、l3,仿真值与理论值分别相差最大为1.3%、1.9%与3.6%.仿真与理论的结果相近,证明了理论推导模型的正确性. 图10 α与t的关系Fig.10 α versus t 图11 li与t的关系Fig.11 li versus t 选用Dynalloy公司生产的TiNi基SMA弹簧作为柔性机械臂的驱动,SMA丝的直径为0.51 mm,绕成弹簧的中径为3.45 mm.主结构采用3D打印,单节柔性操控臂模块样机如图12所示. 图12 柔性操控臂模块样机Fig.12 Prototype of flexible manipulator unit 在样机上贴上反光靶点,采用恒流电源通电.在机构转动过程中,用3台高清单反相机对机构拍照,主要拍摄反光靶点,每2 s拍摄1次.在PhotoModeler Scanner软件中处理并分析靶点,得到每个靶点的位置信息.通过向量方法获得机构的转动角度.通过软件处理后,得到O、Ot、OB这3点的坐标.则转动角度α可表示为 (34) 式中:Ut为O到Ot向量;UB为O到OB向量. 当电流I=0.8,1.0,1.2A时,时间t与转动角度α的关系如图13所示. 图13 实验中α与t的关系Fig.13 α versus t in the experiment 本文以形状记忆合金弹簧为驱动材料及3D打印光敏树脂为支撑材料作为柔性机械臂的机体,设计空间柔性操控臂.通过几何法建立运动学模型,为动力学模型的构建奠定了基础.基于拉格朗日动力学,分析了柔性操控臂的动能、弹性势能和重力势能,得到动力学普遍方程. 通过Adams仿真,仿真与理论对比得到,转动角度与理论计算相差9%与7.5%.对于SMA弹簧长度,仿真值与理论值分别相差最大为1.3%、1.9%与3.6%.结果表明,所提理论能正确分析柔性操控臂动力学.通过算例分析SMA弹簧在不同关节转动下的动力响应,为后续SMA弹簧控制和柔性操控臂实验研究奠定基础.最后,制作单节柔性操控臂样机并针对样机测量不同电流下的转动角度.本文的建模和仿真方法对于其他类型的机器人也具有借鉴意义.


2.3 拉格朗日动力学方程

2.4 数值算例分析












3 实验
4 结语
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
金属热处理(2022年7期)2022-07-26
黑龙江大学自然科学学报(2022年1期)2022-03-29
杂文选刊(2019年12期)2019-12-06
意林·少年版(2018年22期)2018-12-05
汽车文摘(2018年6期)2018-11-26
新青年(2018年8期)2018-08-18
幸福·婚姻版(2018年12期)2018-02-22
山东工业技术(2017年18期)2017-09-12
