复杂交通场景下目标稳定跟踪方法研究
2021-09-08 03:05沈艳秋周明宇代孝森
制导与引信 2021年2期
沈艳秋, 宫 俊, 秦 强, 周明宇, 代孝森
(1.上海无线电设备研究所,上海 201109;2.上海目标识别与环境感知工程技术研究中心,上海 201109;3.中国航天科技集团有限公司交通感知雷达技术研发中心,上海 201109)
0 引言
随着雷达在军事和民用领域的广泛应用,目标跟踪成为雷达数据处理的重要部分,复杂环境下的多目标跟踪更是当前研究的热点和难点问题之一[1-2]。目前,国家正大力发展智慧城市和智能交通,复杂交通场景下多目标跟踪问题也被广泛关注。有效利用交通场景数据实现多目标稳定跟踪,对提升公共安全具有重要意义。
数据关联和跟踪滤波是多目标跟踪的关键技术。经典的数据关联算法有最近邻域关联法、概率数据关联法和联合概率数据关联法等。跟踪滤波算法主要有卡尔曼滤波、扩展卡尔曼滤波和无迹卡尔曼滤波等。可根据应用场合的需求特点选择不同的算法。由于实际交通场景中必然会存在多目标相互遮挡和交叉运动等情况,仅考虑数据关联和跟踪滤波的雷达多目标跟踪算法跟踪效果不佳,很难在实际场景中应用。因此,有必要进一步研究复杂交通场景下目标稳定跟踪的方法。
为提高交通场景中目标跟踪的稳定性和精确性,本文在采用卡尔曼滤波和概率数据关联的雷达多目标跟踪算法的基础上,提出了一种基于欧氏距离的改进的航迹关联方法,通过增加航向夹角的判别约束,实现航迹与航迹之间的关联,提高航迹跟踪的完整性和稳定性。最后,利用实测交通雷达数据来验证该算法在交通场景中多目标跟踪应用的可靠性。
1 多目标跟踪算法框架
由于实际道路环境复杂,雷达自身也存在工作不稳定和回波能量不均匀问题,可能会导致回波数据中含有大量虚假目标,或遗漏有效目标信息。此外,由于雷达每一帧的目标检测信号独立且存在大量噪声[3],可能导致同一目标相邻帧之间的运动状态信息不连续。针对上述情况,亟需对目标的位置和速度信息进行有效提取,实现目标的稳定跟踪。
本文设计的多目标跟踪算法的数据处理步骤主要包括数据预处理、航迹起始、航迹维持和航迹终结。
(1)数据预处理
数据预处理是指为提高数据质量和目标跟踪准确性,对原始数据进行预处理,主要包括位置约束、去除静止点、剔除虚警概率高的测量值以及点迹聚类。本文剔除了径向距离大于150 m、绝对速度为0、虚警率不小于75%的测量数据,点迹聚类采用密度聚类算法(DBSCAN)[4-5]。
(2)航迹起始
航迹起始是指将当前时刻点迹与历史时刻点迹关联,形成一条新的目标航迹。本文采用直观法进行航迹起始,若连续4帧的测量数据中,有3帧及以上满足阈值条件,则认为航迹起始成功。
(3)航迹维持
航迹维持包括状态估计、数据关联和航迹关联。利用卡尔曼滤波器对多目标点迹进行跟踪滤波,对其各个参数进行初始化,并通过概率数据关联算法进行点迹与航迹关联。针对多目标相互遮挡和交叉运动等造成的航迹中断或关联错误导致航迹不连续的情况,利用一种基于欧氏距离的改进关联方法进行航迹与航迹的关联。
(4)航迹终结
航迹终结是指若雷达在连续多帧数内未有测量值与航迹成功关联,则认为该目标已不存在,航迹终止。
2 多目标跟踪算法
2.1 航迹起始
航迹起始采用直观法。该方法基于物体的运动规律,认为一个物体的运动速度应在其最大与最小速度之间,且物体的加速度也满足该规律。因此,如果在雷达的N次扫描得到的测量值中有M个测量或预测的目标运动速度介于其最大值vmax与最小值vmin之间,且测量或预测的目标加速度的绝对值小于其最大加速度值amax,则直观法认为航迹起始成功。具体步骤[6]为:
a)分别录入第1帧和第2帧所有点迹的位置和速度信息,记录速度满足波门关系的点迹,记为临时航迹;
b)录入第3 帧所有点迹信息,依次判断速度、加速度及航向是否满足对应波门关系,若满足则航迹起始成功,若不满足则通过两点外推得到第3帧目标的位置,并录入第4帧所有点迹信息;
c)依上述步骤判断第2帧~第4帧目标是否在速度波门、加速度波门及航向波门内,若存在则航迹起始成功,反之则删除航迹。
2.2 航迹维持
航迹维持包括状态估计、数据关联和航迹关联,其中一个关键问题是对目标的运动状态进行有效的滤波估计。
(1)卡尔曼滤波
雷达回波中往往存在噪声干扰,导致目标运动参数估计不准确,利用卡尔曼滤波器可降低噪声的影响。雷达在k时刻得到的信息可用状态向量X k=[x(k),y(k),v x(k),v y(k)]T表示。其中,x(k),y(k)分别是笛卡尔坐标系下目标径向距离对应的x轴和y轴分量,v x(k),v y(k)是径向速度对应的x轴和y轴分量。
目标运动状态模型可以表示为


(2)概率数据关联
对于单目标跟踪的航迹更新,只有一条航迹,只要将新的测量值与已存在的航迹关联即可完成更新。多目标数据关联本质上与单目标数据关联相同,但为了减小数据关联的计算量,首先需要为已经存在的航迹确定一个测量值的范围,即相关波门,再将落入相关波门内的测量值与已存在的航迹进行关联。概率数据关联算法[8]综合考虑了所有落入相关波门内的测量值,通过计算各测量值源自目标的概率大小,将各个测量值的加权和作为等效测量值来更新目标状态。
设某目标从航迹起始时刻至k时刻波门内的全部有效测量集合A与k时刻的有效测量集合B分别为


其中

利用卡尔曼滤波算法计算各相关波门内所有测量对于目标的状态估计,然后采用概率数据关联算法进行加权计算,即可得到各个目标的最终更新的状态估计。
(3)基于欧氏距离的航迹关联
由于多目标相互遮挡和交叉运动等情况,导致航迹中断或关联错误,无法再继续关联点迹,造成航迹不连续。此时,新生成的航迹和该目标原始航迹的间隔时间通常较短,如果是点迹与航迹错误关联的情况,那么新航迹起始时间也是原始航迹终结时间;如果是短时间内航迹中断的情况,新生航迹则会在原始航迹终结后的较短时间间隔内起始。

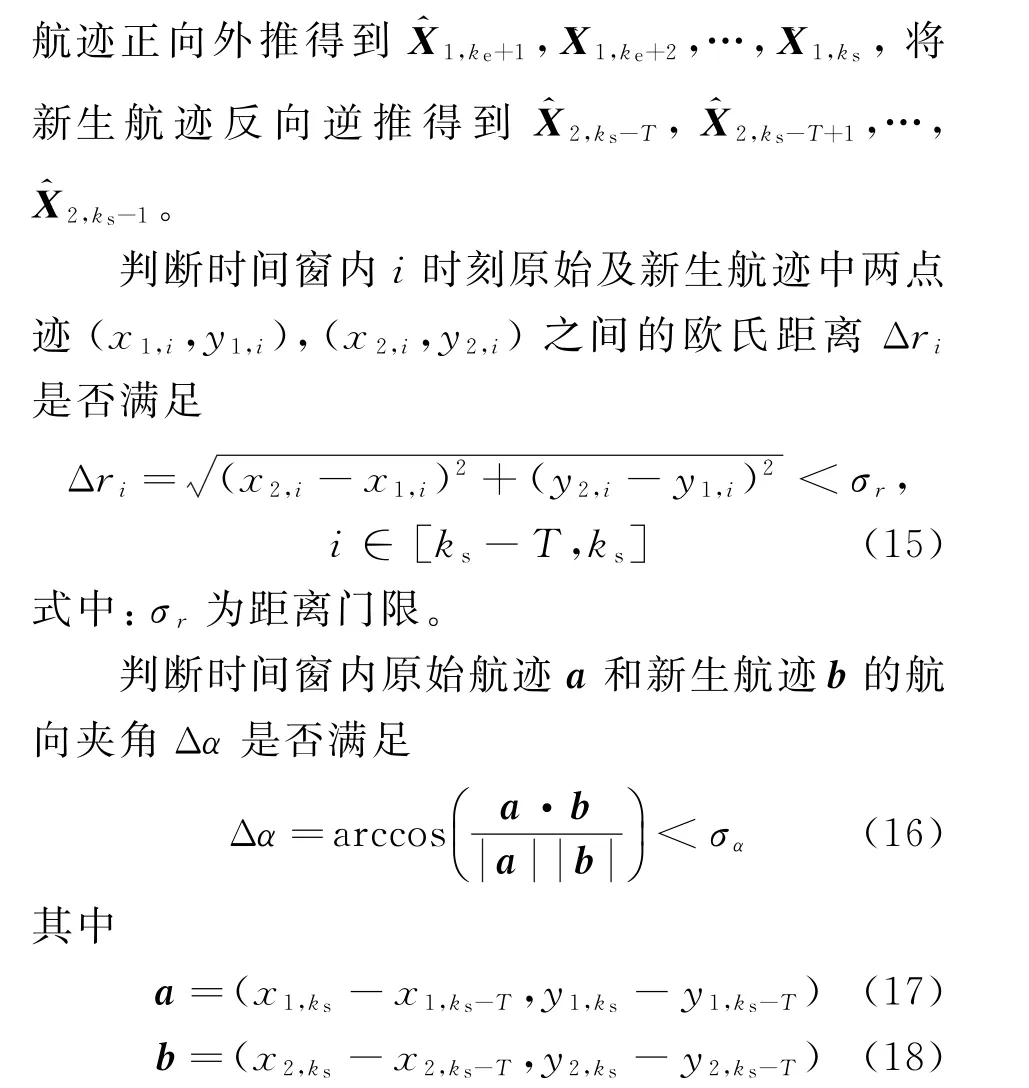
式中:σα为航向夹角门限。
选择距离和航向夹角都满足阈值条件的原始航迹和新生航迹进行关联,更新原始航迹的数据和状态,删除新生航迹信息。航迹关联示意图如图1所示。

图1 航迹关联示意图
2.3 航迹终结
当目标离开视野时,应终结该目标航迹。本文采用一种简便的方法,即记录每一条航迹未能连续与新的测量数据成功关联的帧数,当有连续7帧测量值没有与该航迹关联时,下一帧数据将不再考虑与这条航迹进行关联,即终止此航迹。航迹输出的信息包括滤波后的距离、速度、点迹跟踪状态和航迹编号。
3 试验结果与分析
本文使用毫米波雷达对环境数据进行采集,通过CAN 总线传输数据,在电脑端进行数据的收集和处理,并在雷达上方架设摄像机用于对比分析与评估验证。试验选取了两处交通场景,试验仪器示意图与场景实况如图2所示。

图2 试验仪器与场景实况图
在图2(b)所示直道场景中,监测区域存在3辆动目标小汽车和1辆静止大卡车。图3为直道场景目标测量点迹与跟踪轨迹的叠加图,图3(a)~图3(c)分别是直道场景中目标横向距离、纵向距离和纵向相对速度随帧数变化的情况。
从测量点迹可以看出,雷达噪声大且杂波多;当目标相接近时,目标产生的测量点迹分布较为密集。结合摄像机捕获的视频信息可知,3个动目标分别对应2辆去向车辆和1辆来向车辆,目标1和目标2为去向车辆,2个目标的速度和距离均相近,目标2紧跟目标1运动,在第80帧~第100帧时发生交叉事件;在第50帧~第60帧时,来向车辆目标3被去向车辆遮挡,导致测量信息丢失,航迹存在部分缺失。目标跟踪试验结果表明:当目标以5 m/s和10 m/s的速度远离或靠近雷达时,算法能够对其进行有效跟踪;在目标交叉临近区域和测量值缺失区域,算法对目标状态进行了精确估计,准确捕捉到了实际的目标运动轨迹。
在图2(c)所示天桥场景中,同时存在小汽车、中型汽车等9个动目标。图4为天桥场景目标测量点迹与跟踪轨迹的叠加图,图4(a)~图4(c)分别是天桥场景中目标横向距离、纵向距离和纵向相对速度随帧数变化的情况。

图4 天桥场景目标测量点迹与跟踪轨迹图
当目标车辆在距离雷达较近位置时,由于角度变化较大等原因,导致航迹提前终结。目标真实测量点的周围均匀分布着虚假目标点,算法成功滤除了大量的无用的虚假目标,得到连续的、稳定的有效航迹,航迹与目标车辆一一对应,跟踪结果与实际情况相符。
同时,采用仅考虑数据关联和跟踪滤波的雷达多目标跟踪算法对上述两种场景进行目标跟踪试验。试验得到的目标数多于真实目标数,无法与真实目标相对应,跟踪效果不佳。
为定量评估目标跟踪效果,利用航迹跟踪成功率对轨迹点迹连续情况进行评估,航迹跟踪成功率为轨迹成功关联测量点次数与轨迹从起始至终结的总帧数的比值。两种场景下的多目标航迹跟踪成功率如表1所示。
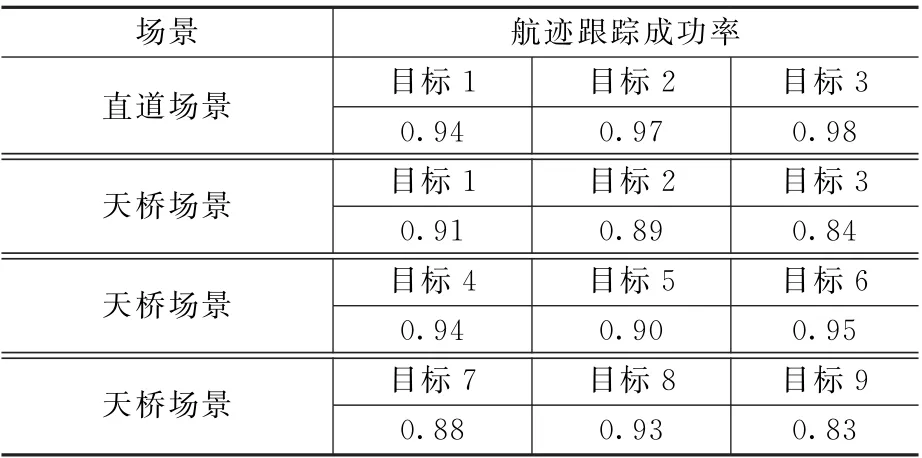
表1 多目标航迹跟踪结果
在直道场景中,目标航迹跟踪成功率达到0.94以上;在天桥场景中,成功率在0.83 以上。说明航迹跟踪质量良好,目标点迹连续,算法具有较好的稳定性。
4 结论
本文针对交通场景中多目标跟踪的难点,采用基于卡尔曼滤波和概率数据关联的多目标跟踪算法,实现点迹与航迹之间的关联。并在此基础上,提出一种基于欧氏距离的改进的航迹关联方法来提高航迹跟踪的完整性。试验结果表明,所提多目标跟踪算法能较好地跟踪存在相互遮挡和交叉运动情况的多目标,跟踪航迹具有较好的完整性和稳定性,可应用于智能交通场景。此外,该方法也为其他领域类似的多目标跟踪应用提供了技术支撑。
猜你喜欢
航空学报(2022年9期)2022-10-14
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
航空学报(2022年5期)2022-07-04
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2021年7期)2021-08-13
科学导报·科学工程与电力(2019年5期)2019-10-20
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05