
我国守时系统发展现状与性能分析
2021-09-08 07:56杨玉婷刘晨帆蔺玉亭李国俊
自动化仪表 2021年7期
杨玉婷,刘晨帆,蔺玉亭,李国俊
(北京卫星导航中心,北京 100094)
0 引言
时间频率广泛用于科学技术研究、国家经济和国防建设。 尤其是在卫星导航、通信互联网、深空探测、载人航天、金融、电力、目标探测和拦截、联合作战和精确打击等领域,离不开时间频率的支持。 在这些领域的广泛应用也促进了时间基准和守时系统的发展。 时间基准和守时系统是国家重大基础设施。 只有高精度的守时系统才能维持时间基准,提供可靠的时间频率服务。 本文首先概述了国内外时间基准保持与发播现状。 其次,利用国际计量局(international bureau of weights and measures,BIPM)公布的数据,结合经典的守时性能分析与评估的方法,对我国守时系统性能进行分析。
1 国内外守时系统发展现状
1971 年,由国际计量局建立和保持的协调世界时(coordinated universal time,UTC)被确定为法定的国际标准时间[1]。 经过50 多年的发展,全球80 多个守时实验室约450 台高精度原子钟利用基于全球导航卫星系统(global navigation satellite system,GNSS)和卫星双向时间频率传递(two-way satellite time and frequency transfer,TWSTFT)技术参与国际原子时(international atomic time,TAI)的计算[2-6]。 为保证其频率速率溯源到秒定义,12 台秒定义的复现装置——时间频率基准钟也参与守时计算。 目前,TAI 频率准确度优于1×10-15,频率月稳定度达到3×10-16。 为了满足对UTC实时性要求更高的用户需求[2],BIPM 利用权重占74%的62 个守时实验室的300 多台高性能原子钟联合生成快速协调世界时(rapid coordinated universal time,UTCr)。 其性能与UTC 相当。 很多国家建有独立自主的标准时间频率服务体系,并研制了配套的时频应用设备。 各国对时间频率的精准性提出了越来越高的要求,对时间频率的发展推进也给予了大力支持。
美国现有权威的两个国家法定的标准时间[3,7-8],分别是美国海军天文台( United States naval observatory,USNO)和美国国家计量院(national institute of standards and technology,NIST)保持的UTC(USNO)和UTC(NIST)。 长期以来,USNO 拥有全球守时钟组规模最大的守时实验室,守时水平一直处于国际领先地位。 其标准时间与UTC 保持在5 ns 以内。 USNO 由军方主管,NIST 以民用为主,目前两者时间保持高度统一,时间偏差在20 ns 以内。 2018 年美国提出建设GPS 的陆基备份授时系统,用于增强GPS 系统授时服务的抗打击能力。
1947 年,俄罗斯从法律法规、技术以及计量等方面加强时间频率服务建设[9-10],明确了不同层级的时间频率管理机构、发播系统、时频计量体系以及用户。俄罗斯计量院保持的标准时间UTC(SU)[3]作为国家一级时间频率标准,通过GLONASS 卫星导航系统、长波无线电、超长波无线电导航、有线通信、无线通信及电视等向用户提供时间频率服务。 其早在20 世纪60年代末就建立了4 个备份守时实验室,现采用GPS/GLONASS 共视法实现向国家标准时间UTC(SU)的溯源,时间偏差保持在100 ns 以内。
欧洲各国都建有时间频率服务体系[3,11-12]。 在时频基准方面,有德国计量院 (physikalisch-technische bundesanstalt,PTB)、英国国家物理实验室(national physical laboratory, NPL) 及法国巴黎天文台(observatoire de Paris,OP) 独立保持的标准时间UTC(PTB)、UTC(NPL)、UTC(OP)等。 在授时服务方面,有欧洲正在建设的Galileo 卫星导航系统、长短波授时系统及电话、网络授时系统等。
我国从20 世纪60 年代后期开始,全面开展原子钟的研制工作。 近50 年来,我国守时系统建设和发展取得突破性进展。 据国际时间局年报记载,我国中科院陕西天文台于1980 年(中科院国家授时中心的前身)首次参与TAI 和UTC 计算和保持[1]。 1987 年,陕西天文台、上海天文台、武汉物理所及北京无线电计量研究院实现了约22 台原子钟数据共享,异地联合产生综合原子时TA(JATC),正式向国际时间局上报原子钟钟差数据(简称报数)。 近年来,铷原子钟批量生产,大量氢原子钟投入工程使用,冷原子喷泉钟、光钟等频率标准装置的研制和关键技术攻关取得了新的进展。 随着时间频率应用领域的拓展,我国中科院国家授时中心(national time service center ,NTSC)、中国计量科学研究院(national institute of metrology,NIM)、北京无线电计量测试研究所(Beijing radio institute of metrology ,BIRM)以及北京卫星导航中心(Beijing satellite navigation center,BSNC) 相继建立守时系统[1,13-15],自主保持地方协调世界时UTC(NTSC)、UTC(NIM)、UTC(BIRM)和UTC(BSNC)。 NTSC、NIM、BIRM 与BIPM 建立了直接的时间比对链路,向BIPM报数,参与TAI 与UTC 的归算与保持。 NIM 研制的NIM5 铯原子喷泉钟获得BIPM 认可,作为基准钟之一,参与驾驭TAI[3]。 随着北斗三号卫星导航系统的建立和完善,BSNC 为北斗三号卫星导航系统提供的时间基准使卫星授时性能得到了大幅度的提升,达到了亚太地区授时精度优于10 ns、全球授时精度优于20 ns 的技术指标。 基于GNSS 卫星观测的时间比对链路在全球范围内广泛使用。 其中,绝大多数国际比对链路由GPS 承担, 仅在欧洲部分地区使用GLONASS[2,16]。 梁坤、张继海、Wei Huang 等开展了基于北斗共视的时间频率传递、北斗时间传递标准CGGTTS 等相关研究[17-20],为下一步北斗卫星导航系统参与国际时间频率传递工作提供了技术支撑。
2 我国守时实验室近15 年进展
本文选用我国在时间频率领域具有代表性的2 个守时系统UTC(NTSC)和UTC(NIM),对其近15 年来时间和频率稳定性、频率控制精度等关键指标进行分析,采样间隔为5 年。 根据BIPM 月报公布的UTCUTC(NTSC)、UTC-UTC(NIM)时差数据,统计均值和标准方差,分别用于评价时间稳定性和频率控制精度,如表1 所示。
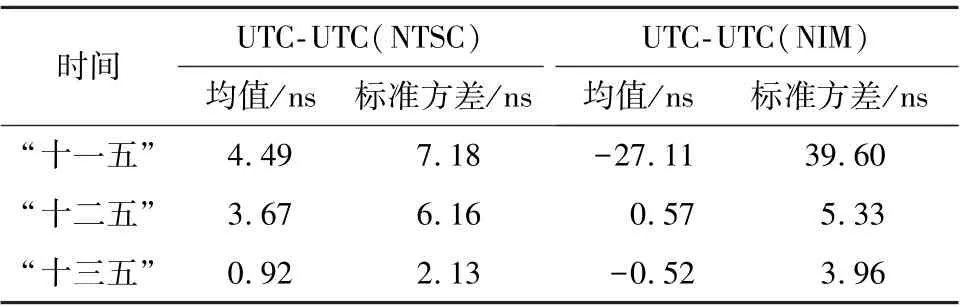
表1 我国守时系统UTC(k)时间稳定性、频率控制精度Tab.1 Stability and frequency control accuracy of UTC(k)
通过表1 可知,从“十一五”发展到“十三五”UTCUTC(NTSC)的均值从4.49 ns 降至0.92 ns,标准方差从7. 18 ns 降至2. 13 ns;UTC-UTC(NIM)的均值从-27.11 ns 降低-0.52 ns,标准方差从39. 60 ns 降至3.96 ns。 可以看出,近15 年里我国守时系统UTC(k)时间稳定性和频率控制精度至少提升了3 倍。
计算阿伦方差(Allan variance)用于评价UTC(k)的频率稳定度,如图1 所示。
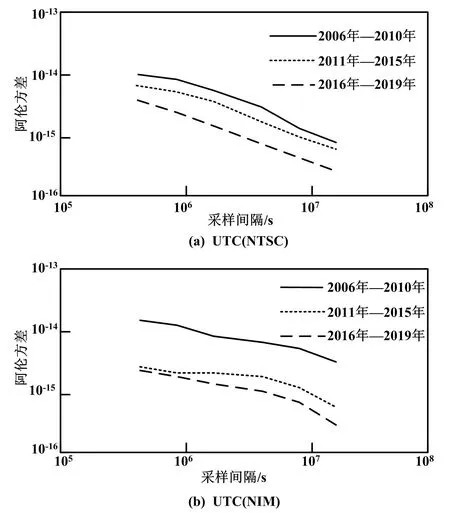
图1 UTC(k)的频率稳定度Fig.1 The frequency stability of UTC(k)
由图1 可知,从“十一五”(2006 年至2010 年)到“十二五”(2011 年至2015 年),UTC(NTSC)频率稳定度从1×10-14/5 d 提高到6.8×10-15/5 d,UTC(NIM)从1.43×10-14/5 d 提高到2.37×10-15/5 d。 到“十三五”(2016 年至2019 年),UTC(NTSC)频率稳定度达到了3.71×10-15/5 d,UTC(NIM)频率稳定度为2.19×10-15/5 d。 可以看出,近15 年里我国守时系统UTC(k)的频率长期稳定性不断提升。
3 与国外守时系统比较分析
本文选用国际时间传递的中心节点德国物理技术研究院UTC(PTB)、美国海军天文台保持的协调世界时UTC(USNO)、俄罗斯GLONASS 卫星导航系统的时间基准UTC(SU)、法国的标准时间UTC(OP)和我国守时系统UTC(k),针对时间频率稳定性、频率控制精度、时间比对链路等性能进行比较分析。
3.1 时间频率稳定性与频率控制精度
在BIPM 公布服务器上下载以上守时实验室UTC(k)与UTC 的时差数据,分析UTC(k)的时间稳定性与频率控制精度。 2008 年1 月至2019 年6 月,UTC(k)与UTC 的时差曲线如图2 所示。
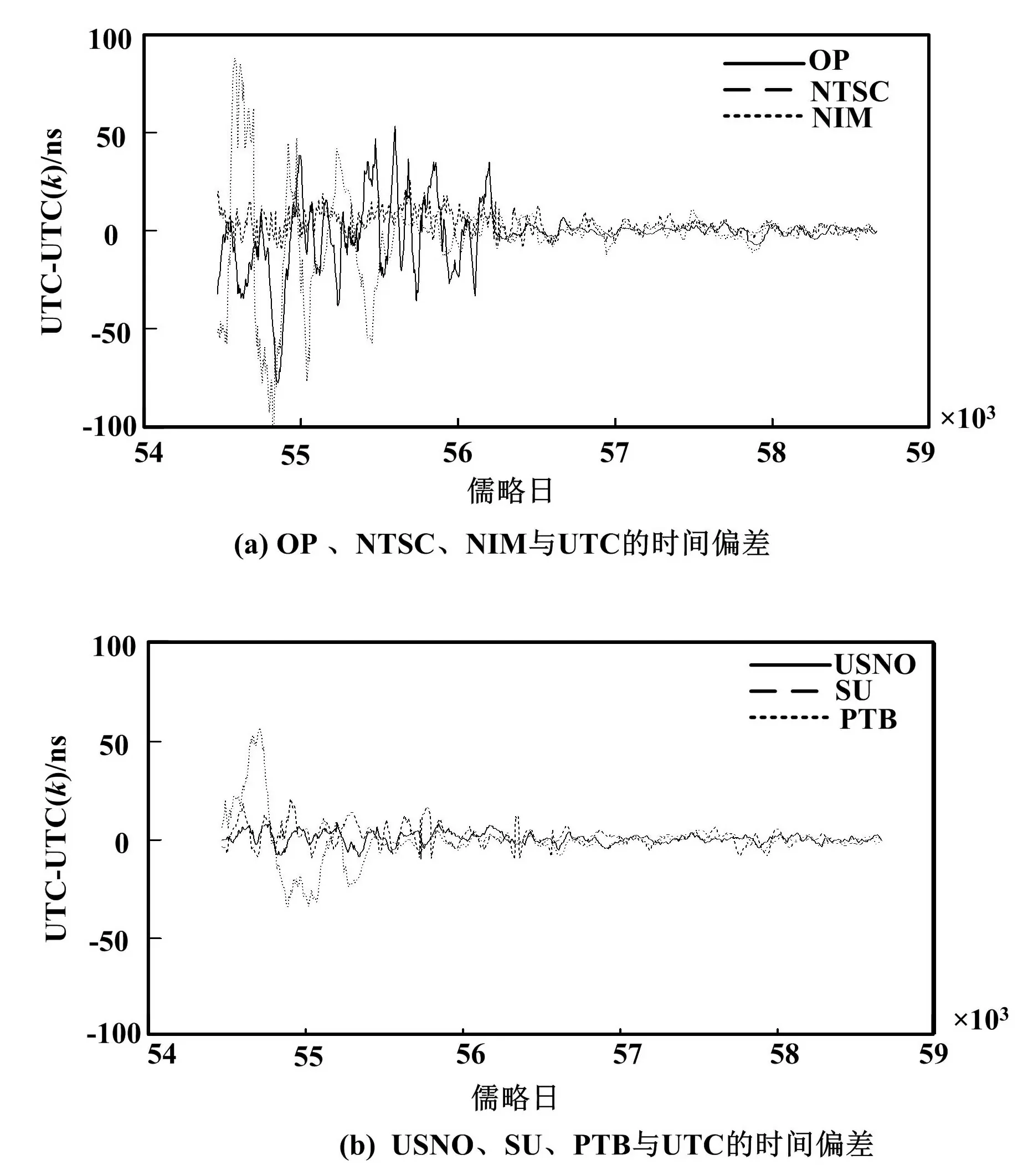
图2 UTC(k)与UTC 的时差曲线Fig.2 The time differences curves between UTC(k) and UTC
由图2 可知,近10 年来我国守时系统UTC(k)的时间稳定性不断提升,2014 年以来与UTC 间的时差保持在20 ns 以内,特别是UTC(NTSC)近2 年与UTC 基本保持在±5 ns 以内,与国际先进守时系统水平相当。
2017 年1 月至2019 年7 月UTC(k)与UTC 的时差均值、标准方差、最小值和最大值如表2 所示。
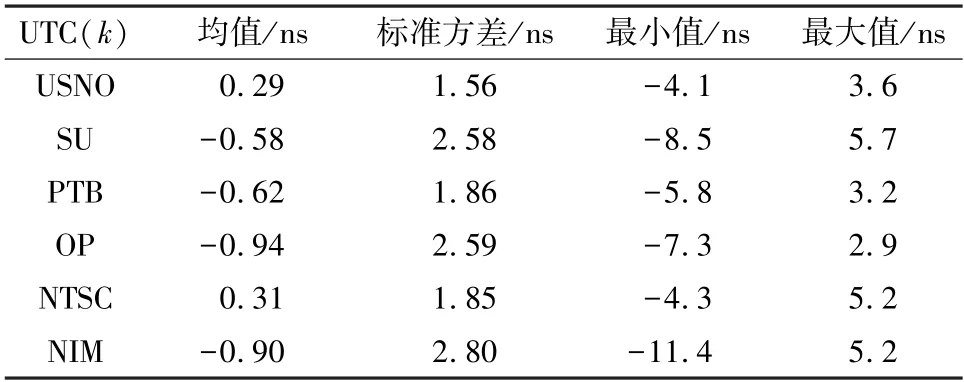
表2 UTC(k)与UTC 的时差均值、标准方差、最小值和最大值Tab.2 The statistical results of time difference between UTC(k) and UTC
由表2 可知,从2017 年至今,我国守时系统UTC(NTSC)标准方差为1.85 ns,仅次于美国守时系统UTC(USNO)。 UTC(NIM)因频率驾驭算法导致其控制精度与UTC(USNO)存在一定的差距。
由图2 和表2 可知,UTC(k)的交叠式阿伦方差在(0.5~4)×10-15/5 d 和(2~6)×10-16/1×107s。 在5 天的时间间隔内,时间偏移量在0.1~1 ns;在1×107s 的时间间隔内,时间偏移量为0.7~3 ns。 与其他国外守时系统相比,我国守时系统UTC(k)5 天频率稳定性较差,但UTC(NTSC)20 天长期稳定性较好。
2017 年1 月至2019 年6 月守时实验室UTC(k)稳定度分析结果如图3 所示。
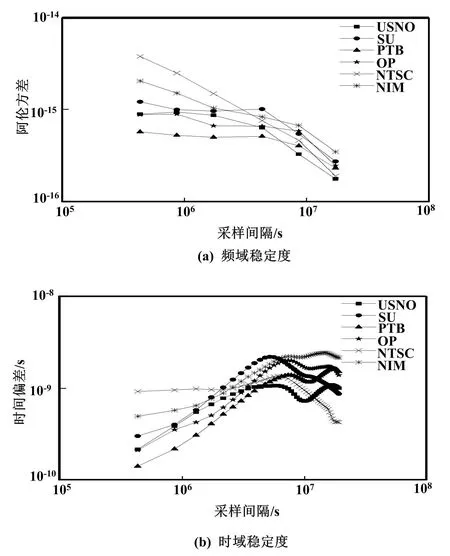
图3 守时实验室UTC(k)稳定度分析结果Fig.3 The UTC(k) stability analysis results of the time-keeping laboratories
2017 年1 月至2019 年6 月守时实验室UTC(k)稳定度如表3 所示。
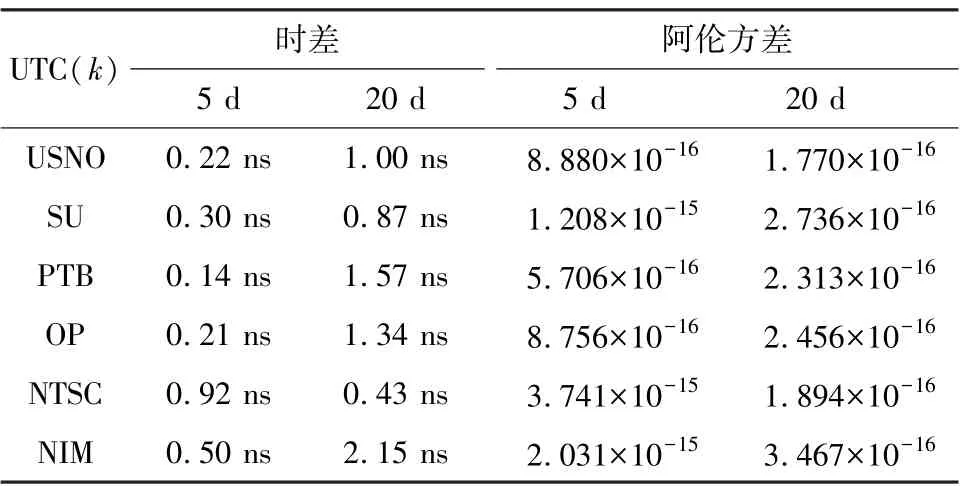
表3 守时实验室UTC(k)稳定度Tab.3 The UTC(k) stability of the time-keeping laboratories
3.2 在TAI 计算权重占比
目前BIPM 在UTC 计算中采用的取权算法的原则是依据原子钟稳定性好和可预测的特点,以权值大小直接反映原子钟的性能好坏。 根据BIPM 公布守时实验室原子钟的权重数据,将权重占比较大的守时系统列出,2019 年2 月至2019 年7 月权重占比较大的守时系统如表4 所示。 2019 年7 月守时系统权重占比及原子钟数量统计结果如图4 所示。

表4 权重占比较大的守时系统Tab.4 UTC(k) with greater weights
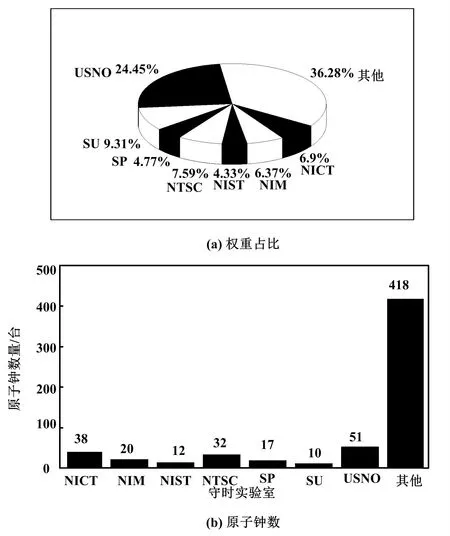
图4 守时系统权重占比及原子钟数量统计结果Fig.4 The weights of the time-keeping systems and statistics of the atomic clock numbers
由表4 和图4 可知,权重占比较大的守时系统共7个,分别位于美国海军天文台(USNO)和美国国家计量院(NIST),俄罗斯国家计量院VNIIFTRI 下属的国家时间频率服务组织(SU),瑞典联合守时系统(SP),日本情报通信研究所(NICT)和我国NTSC、NIM。 其中:美国海军天文台(USNO)参与TAI 计算原子钟数量最多,占所有参与TAI 计算原子钟总数量8.53%,在2019 年7 月其权重占比高达24.45%;俄罗斯SU 守时钟组仅10 台,但其权重占比达到9. 31%;我国NTSC权重占比为7.59%,NIM 权重占比为6.37%,分别位居第三、第四。 由此可知,我国守时系统在UTC 计算中权重占比排名靠前,但守时钟组规模与美国存在较大差距,单台原子钟性能与俄罗斯存在较大差距。
3.3 时间比对链路
时间比对链路是守时系统的重要组成部分,是实现异地原子钟的时间比对主要手段,包括基于GNSS观测和卫星双向时间频率传递比对链路。 为了减弱比对链路对国际标准时间UTC 不确定度的影响,BIPM定期对链路进行校准,并将校准结果作为BIPM 月报Circular T 第五部分内容,提供给各个守时机构。 目前,基于GPS C1 码多通道全视法时间比对算法(GPSMC)、基于GPS 双频全视法时间比对算法(GPS P3)、基于GPS 精密单点定位时间比对算法(GPS PPP)、GPS PPP 与TWSTFT 组合时间比对算法(TWG PPP)等[5,21]是BIPM 时间比对链路校准的主流算法。 统计2018 年国际比对链路,发现GPS 单频多通道占22%, GPS 双频占70% (其中58% 采用GPS PPP 解算;仅有12%TWSTFT 采用TWG PPP 解算),其余为GPS 和GLONASS 组合链路[2]。 根据2019年6 月发布的Circular T 378 可以得到守时实验室国际时间比对链路的不确定度[22],如表5 所示。
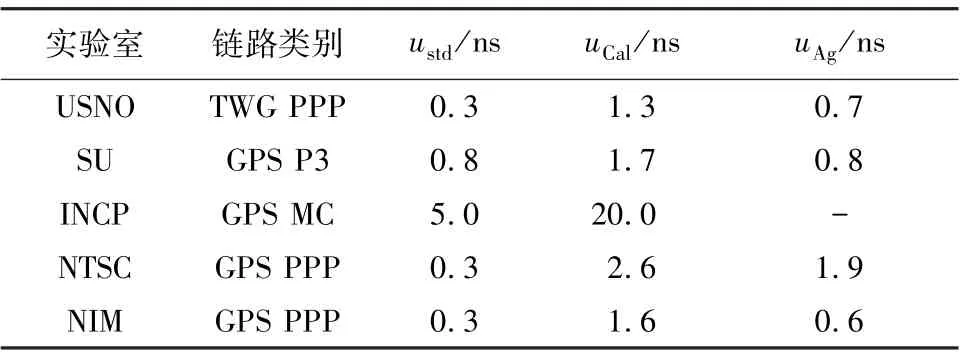
表5 守时实验室国际时间比对链路的不确定度Tab.5 The uncertainty of international time comparison links in the time-keeping laboratories
表5 中:ustd为不超过30 天的原始数据中的相位噪声引起的不确定度。uCal为校准不确定度;uAg为测量设备老化引入的附加不确定度[2]。
由表5 可知,基于GPS PPP 和TWG PPP 时间频率传递链路的不确定度较好,其次为GPS P3。 目前,我国时间比对链路主要采用GPS PPP 比对技术。
4 结论
我国守时系统从2006 年至2019 年近15 年的快速发展,使保持的地方协调世界时UTC(k)时间稳定性和频率控制精度至少提升了3 倍,频率长期稳定性不断提升;近2 年,我国UTC(k)与UTC 基本保持在±5 ns 以内,控制精度与国际先进守时系统水平相当;UTC(NTSC)、UTC(NIM)在国际原子时TAI 计算中权重占比仅次于美国USNO、俄罗斯SU,分别位居第三、第四。
猜你喜欢
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
新传奇(2019年29期)2019-08-06
宇航计测技术(2018年3期)2018-09-08
中国军转民(2018年3期)2018-06-08
物联网技术(2017年7期)2017-07-20
小天使·一年级语数英综合(2016年5期)2016-05-14
测绘科学与工程(2016年6期)2016-04-17
运输经理世界(2015年5期)2015-07-29
纺织导报(2014年9期)2014-10-31
测绘科学与工程(2014年2期)2014-02-27
